

1147
.pdfМинистерство образования и науки РФ Федеральное государственное бюджетное образовательное учреждение высшего образования «Воронежский государственный лесотехнический университет имени Г.Ф. Морозова»
СРЕДСТВА АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
Методические указания к выполнению курсового проекта для студентов по направлению подготовки
15.03.04 – Автоматизация технологических процессов и производств
Воронеж 2016
2
УДК
Грибанов, А. А. Средства автоматизации технологических процессов [Текст] : методические указания к выполнению курсового проекта для студентов по направлению подготовки 15.03.04 – Автоматизация технологических процессов и производств / А. А. Грибанов; М-во образования и науки РФ, ФГБОУ ВО «ВГЛТУ». – Воронеж, 2016. – 15 с.
Печатается по решению редакционно-издательского совета ВГЛТУ
Рецензент: д.т.н., профессор, зав. кафедрой электротехники и автоматики ФГБОУ ВО «Воронежский государственный аграрный университет имени императора Петра I» Афоничев Д.Н.
3
Оглавление
Введение................................................................................................................. |
4 |
|
1 Основные этапы выполнения курсового проекта........................................... |
4 |
|
1.1 |
Построение функциональной схемы системы регулирования и |
|
управления ............................................................................................................. |
4 |
|
1.2 |
Выбор устройств измерительной части системы управления.................... |
5 |
1.3 |
Анализ информационно-управляющей части системы контроля, |
|
регулирования и управления. Выбор закона регулирования ........................... |
6 |
|
1.4 |
Выбор исполнительных устройств................................................................ |
7 |
1.5 |
Анализ статических и динамических характеристик АСР. Устой- |
|
чивость системы .................................................................................................... |
9 |
|
1.6 |
Анализ принципиальной схемы..................................................................... |
9 |
1.7 |
Расчет характеристик надежности устройства .......................................... |
10 |
2 Требование к оформлению курсового проекта ............................................. |
11 |
|
3 Варианты заданий на курсовое проектирование .......................................... |
11 |
|
Библиографический список ............................................................................... |
15 |
|
4
Введение
Повышение технико-экономических показателей автоматизированных производств, таких как качество процессов управления, надежность и живучесть, безопасность и ремонтопригодность, снижение затрат на проектирование, монтаж и пуск, возможность адаптации системы управления к изменяющимся свойствам объекта автоматизации, улучшения условий работы оператора в большей степени зависит от используемых технических средств.
Являясь частью такой сложной системы, как автоматизированное производство, комплекс технических средств представляет собой сложную систему аппаратных и аппаратно-программных средств.
В результате выполнения курсового проекта студенты должны усвоить: принципы построения и функционирования электрических, цифровых, микропроцессорных и пневматических средств автоматизированных систем управления; методы анализа статических, динамических и надежностных характеристик типовых средств автоматизации; способы конструирования технических средств автоматизации.
При выполнении курсового проекта студенты должны основываться на учебном материале, излагаемом в курсах «Математика» (математический анализ, операционное исчисление, теория вероятности), «Вычислительная техника» (состав и назначение компонентов цифровой техники, программное обеспечение), «Теория автоматического управления» (методы анализа статических и динамических характеристик линейных систем, типовые законы регулирования).
5
1. Основные этапы выполнения курсового проекта
1.1. Построение функциональной схемы системы регулирования и управления
Функциональные схемы являются основным техническим документом, определяющим функционально-блочную структуру отдельных узлов автоматического контроля, регулирования и управления технологическим процессом и оснащение объекта управления приборами и средствами автоматизации (в том числе средствами телемеханики и компьютерной техники).
Результатом составления функциональных схем являются:
выбор методов измерения технологических параметров;
выбор основных технических средств автоматизации, наиболее полно отвечающих предъявляемым требованиям и условиям работы автоматизируемого объекта;
определение приводов исполнительных механизмов регулировочных и запорных органов технического оборудования, управляемых автоматически или дистанционно;
размещение средств автоматизации на щитах, пультах, технологическом оборудовании и трубопроводах и т.п. и определение способов представления информации о состоянии технологического процесса и оборудования.
В данном разделе студенты, анализируя данные задания на курсовой проект с учетом проведения технологического процесса (пожаро- и взрывоопасность, агрессивность и токсичность окружающей среды, расстояние от мест установки датчиков, вспомогательных устройств, исполнительных механизмов до пунктов контроля и управления), формируют функциональную схему системы регулирования и управления, состав которой расшифровывается и анализируется на последующих этапах проектирования.
1.2. Выбор устройств измерительной части системы управления
Для получения достоверной информации о параметрах технологических процессов необходимо выбрать соответствующий метод и средства измерения.
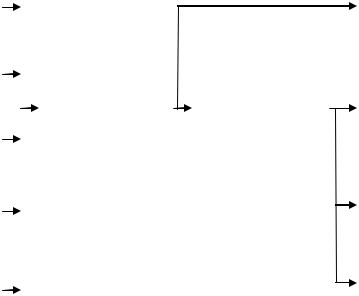
Устройства получения информации образуют первую функциональную группу изделий ГСП (см. рис. 1). К данным устройствам, образующим канал сбора и преобразования информации, относят чувствительные элементы или собственно датчики, измерительные преобразователи.
Датчики физических величин воспринимают контролируемый параметр и преобразуют его в величину, удобную для передачи по каналам связи или дальнейшего преобразования.
Измерительные преобразователи переводят выходной сигнал датчиков в выходную физическую величину: перемещение, усилие, сопротивление, напряжение, ток, частоту, импульсы. Измерительные преобразователи и чувствительные элементы часто представляют собой единичное изделие и назы-
6
ваются первичными измерительными преобразователями, если на их выходе сигнал представлен в естественном виде (не унифицирован).
Теплоэнергети- |
|
|
|
|
|
|
|
|
|
|
|
|
|
Естественный |
|
ческие величины |
|
|
|
|
|
|
сигнал |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Энергоэнергети- |
|
|
|
|
|
|
|
ческие величины |
|
|
Первичный |
|
Промежуточный |
|
Унифициро- |
|
|
|
измерительный |
|
измерительный |
|
ванный элек- |
|
|
|
|||||
|
|
|
преобразователь |
|
преобразователь |
|
трический |
Механические |
|
|
|
|
|||
|
|
|
|
сигнал |
|||
|
|
|
|
|
|
||
величины |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Унифициро- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ванный пнев- |
Химический |
|
|
|
|
|
|
|
|
|
|
|
|
|
матический |
|
состав |
|
|
|
|
|
|
|
|
|
|
|
|
|
сигнал |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Физические |
|
|
|
|
|
|
Цифровой |
|
|
|
|
|
|
сигнал |
|
свойства |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1. Структура измерительного преобразователя ГСП
Производя выбор измерительных устройств для своей системы контроля, регулирования и управления, необходимо уделить особое внимание типу выходного сигнала (пневматический, электрический и т.д.) и его уровню и унифицированности. Сигнал должен с достаточной достоверностью передан по линиям связи и соответствовать входным параметрам последующих устройств.
1.3. Анализ информационно-управляющей части системы контроля, регулирования и управления. Выбор закона регулирования
К информационно-управляющей части системы контроля, регулирования и управления предъявляют следующие требования:
обеспечение информационных функций: сбор, обработка и представление информации о состоянии технологического комплекса оперативному персоналу или передача информации в смежные системы управления;
обеспечение управляющих функций: регулирование отдельных технологических переменных, однотактное логическое управление операциями или аппаратами, программное логическое управление группой оборудования; оптимальное управление установившимися или переходными режимами или отдельными стадиями процесса; адаптивное управление объектом в целом.
Сосредотачиваются устройства информационно-управляющей части в помещениях с условиями близкими к нормальным условиям эксплуатации, на некотором отдалении от технологического объекта.
7
Комплекс технических средств (КТС) конкретизирован в каждом варианте задания. Выполняя данный раздел курсового проекта, студенту необходимо:
дать краткое описание состава КТС;
провести анализ возможности реализации П-, ПИ-, ПИД - законов регулирования;
обосновать выбор конкретного закона регулирования для своей системы автоматизации.
1.4. Выбор исполнительных устройств
Исполнительные механизмы и устройства (ИМ, ИУ) входят в группу ГСП, которая использует командную информацию в целях воздействия на процесс.
К основным блокам ИУ относятся: ИМ и регулирующий орган (РО), которые могут быть объединены в одном изделии или собираются из индивидуально выпускаемых блоков.
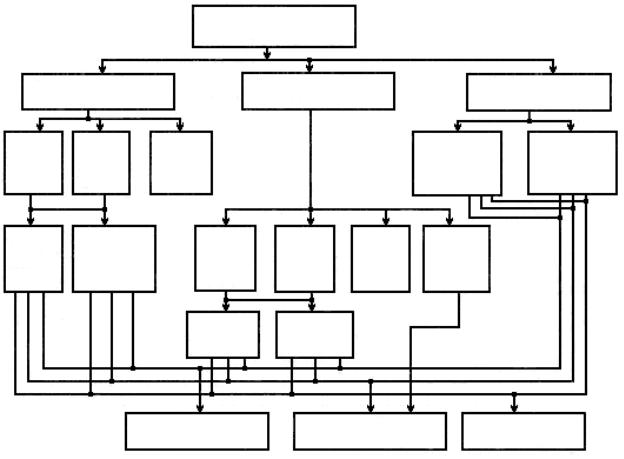
Классификация ИМ представлена на рис. 2.
ИМ
Пневматические |
|
Гидравлические |
Электрические |
|||
|
|
|
||||
Мем- |
Порш- |
Силь- |
|
|
Электро- |
Электро- |
бран- |
фон- |
|
|
|||
невые |
|
|
двигатели |
магнитные |
||
ные |
ные |
|
|
|||
|
|
|
|
|
||
Пру- |
Беспру- |
Мем- |
Порш- |
Ло- |
С гид- |
|
жин- |
бран- |
паст- |
ромуф- |
|
||
жинные |
невые |
|
||||
ные |
ные |
ные |
тами |
|
||
|
|
|
||||
|
|
Пружин- |
Беспру- |
|
|
|
|
|
ные |
жинные |
|
|
|
Однооборотные |
Многоооборотные |
Прямоходные |
Рис. 2. Классификация исполнительных механизмов
Под ИМ в общем случае подразумевают блок ИУ, преобразующий входной управляющий сигнал от регулирующего устройства в сигнал, кото-
8
рый через соответствующую связь осуществляет воздействие на регулирующий орган или непосредственно на объект регулирования. РО называют блок ИУ, с помощью которого производится регулирующее воздействие на объект регулирования.
В данном разделе студентам необходимо выбрать ИУ, которые будут обеспечивать регулирование заданных параметров процесса и конструктивно стыковаться с заданным КТС.
1.5. Анализ статических и динамических характеристик АСР. Устойчивость системы
Вданном разделе перед студентами ставится задача нахождения статических и динамических характеристик спроектированной АСР.
Для решения данной задачи необходимо выполнить описание АСР, для чего необходимо представить модель системы в виде структурной схемы, состоящей из простых направленного действия звеньев.
Всостав математического описания звена входят его характеристики: статическая и динамическая.
Статической характеристикой звена называют зависимость его выход-
ной величины от входной при установившемся режиме
Y f1 x ,
где Y – выходной параметр звена; х – входной параметр звена; f1 – функция, устанавливающая связь между х и Y.
Однако знание только статических характеристик совершенно недостаточно, если необходимо знать поведение системы в переходных режимах, где проявляются устойчивость АСР, качество и точность регулирования. Эти свойства и представляют собой динамические характеристики.
В зависимости от вида входного воздействия динамическую характеристику можно получить в виде переходной или частотной характеристики.
Результатом выполнения этого раздела является расчет устойчивости полученной АСР и построение соответствующих кривых (АФЧХ, годографов
ит.д.).
1.6.Анализ принципиальной схемы
Данный раздел курсового проекта посвящен изучению принципиальной схемы одного из устройств заданного КТС. Студенту необходимо описать принцип функционирования устройства, проанализировать элементную базу.
1.7. Расчет характеристик надежности устройства
Данный раздел является логическим завершением предыдущего пункта. Здесь студент должен рассчитать, в соответствии с заданным законом распределения вероятности безотказной работы, надежность устройства, рассматриваемого выше.
Основными количественными характеристиками являются:
9
вероятность безотказной работы P t ;
частота отказов a t ;
интенсивность отказов t ;
средняя наработка до отказа Т;
Время между соседними отказами для элементов аппаратуры является непрерывной случайной величиной, которая характеризуется некоторым законом распределения.
В теории надежности обычно используются следующие законы: экспоненциальный, распределение Рэлея, нормальное распределение, Гамма – распределение, распределение Вейбулла.
Устройства САУ состоят из элементов, работающих в различных условиях эксплуатации. Если объединить различные элементы в отдельные группы по значению интенсивности отказов, то расчетные формулы примут следующий вид:
m
P t П Pi t .
i 1
Результатом данного раздела является расчет основных количественных характеристик надежности и построение кривых P t , a t , t [5, 6, 10].
2. Требование к оформлению курсового проекта
Пояснительная записка (15-20 страниц) состоит из перечисленных выше разделов. К ней прилагается спецификация на средства измерения и исполнительные устройства.
Графическая часть проекта выполняется на листе формата А1, разбитом на подформаты А4 и А3, где изображены: функциональная схема системы, блок-схема комплекса технических средств, статические и динамические характеристики АСР, принципиальная схема устройства, характеристики надежности устройства.
10
3 Варианты заданий на курсовое проектирование
№ |
Наименование |
Регулируемые |
Дополнитель- |
Наименование |
Закон распре- |
|||||
пп |
технических |
параметры |
|
ные сведения о |
устройства для |
деления веро- |
||||
|
средств |
|
|
|
процессе |
расчета надеж- |
ятности |
|||
|
|
|
|
|
|
|
|
ности |
|
|
1 |
2 |
|
3 |
|
|
|
4 |
5 |
6 |
|
1. |
Система |
пнев- |
Температура |
|
Теплоподвод |
ПИ-регулятор |
Распределе- |
|||
|
моавтоматики |
t=100+120 С |
через |
паропро- |
ПР3.31 |
ние |
|
|||
|
«СТАРТ» |
|
(аппарат); дав- |
вод |
|
|
Рэлея |
|
||
|
|
|
ление |
|
|
|
|
|
|
|
|
|
|
Р=0,6 0,7 МПа |
|
|
|
|
|
||
|
|
|
(трубопровод); |
|
|
|
|
|
||
|
|
|
расход |
воды |
|
|
|
|
|
|
|
|
|
G=8 10 m3/ч |
|
|
|
|
|
|
|
|
|
|
(трубопровод) |
|
|
|
|
|
||
2. |
Система |
пнев- |
Уровень |
жид- |
Взрывоопасное |
ПИД-регулятор |
Гамма – |
|
||
|
моавтоматики |
кости L=0 2 m; |
производство, |
ПР3.35 |
распределе- |
|||||
|
«СТАРТ» |
|
температура |
|
теплоподвод в |
|
ние |
|
||
|
|
|
жидкости |
|
|
рубашку аппа- |
|
|
|
|
|
|
|
t=125 130 С |
рата |
горячей |
|
|
|
||
|
|
|
(аппарат) |
|
|
водой |
|
|
|
|
3. |
Агрегатная |
Температура |
в |
Теплоподвод |
П-регулятор |
Экспоненци- |
||||
|
система |
кон- |
аппарате |
|
|
через |
паропро- |
|
альное |
рас- |
|
троля и управ- |
t=50 60 С; |
|
вод |
|
|
пределение |
|||
|
ления |
|
расход воды из |
|
|
|
|
|
||
|
«ЦЕНТР» |
|
аппарата |
|
|
|
|
|
|
|
|
(пневмоавто- |
G=1 2 m3/ч |
|
|
|
|
|
|
||
|
матика) |
|
|
|
|
|
|
|
|
|
|
Агрегатная |
Уровень |
жид- |
|
|
ПИ-регулятор |
Нормальное |
|||
4. |
система |
кон- |
кости в аппара- |
|
|
ПР3.31 |
распределе- |
|||
|
троля и управ- |
те L=3 4 |
m; |
|
|
|
ние |
|
||
|
ления |
|
расход воды из |
|
|
|
|
|
||
|
«ЦЕНТР» |
|
аппарата |
|
|
|
|
|
|
|
|
(пневмоавто- |
G=0,3 0,5 m3/ч |
|
|
|
|
|
|||
|
матика) |
|
|
|
|
|
|
|
|
|
5. |
Потенциомет- |
Температура |
в |
|
|
Потенциометр |
Распределе- |
|||
|
ры типа КСП 2 |
аппарате |
|
|
|
|
КСП 2 |
ние Вейбулла |
||
|
|
|
t=100 110 С; |
|
|
|
|
|
||
|
|
|
Температура |
в |
|
|
|
|
|
|
|
|
|
паропроводе |
|
|
|
|
|
|
|
|
|
|
t=150 160 С |
|
|
|
|
|
||
6. |
Уравновешен- |
Температура |
в |
|
|
Мост КСМ 3 |
Гамма – |
|
||
|
ный мост типа |
аппарате |
|
|
|
|
|
распределе- |
||
|
КСМ 3 |
|
t=100 110 С; |
|
|
|
ние |
|
||
|
|
|
температура |
в |
|
|
|
|
|
|
|
|
|
паропроводе |
|
|
|
|
|
|
|
|
|
|
t=140 150 С |
|
|
|
|
|
||