

199
.pdf3
Федеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования
Воронежская государственная лесотехническая академия
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Часть 3
Методические указания к выполнению лабораторных работ для студентов специальности 220301 – Автоматизация технологических про-
цессов и производств в лесном комплексе
Воронеж 2006
4
УДК 681.5
Петровский В.С. Теория автоматического управления [Текст]. Ч.3 : методические указания к выполнению лабораторных работ для студентов специальности 220301 – Автоматизация технологических процессов и производств в лесном комплексе / В.С. Петровский, Д.А. Глухов ; Фед. агентство по образованию, Гос. образовательное учреждение высш. проф. образования, Воронеж. гос. лесотехн. акад. − Воронеж, 2006. – 15 с.
Печатается по решению редакционно-издательского совета ВГЛТА
Рецензент заведующий кафедрой АТП ВГАСУ, д-р техн. наук, проф. В.Д. Волков
5
Лабораторная работа № 1 Исследование устойчивости АСР на основе критерия Гурвица
Цель работы: провести анализ устойчивости системы согласно критерию Гурвица
Краткие теоретические сведения
Структурная схема АСР в общем виде представлена на рис.1.1.
|
|
|
|
f (t) |
|
g(t) |
|
x(t) |
|
|
y(t) |
|
W(P) |
|
|||
|
|
раз |
|
||
|
|
|
|||
|
|
|
|
|
|
Рис. 1.1 Структурная схема АСР
Передаточная функция АСР, представленной на рис.1.1, в замкнутом состоянии имеет вид
|
|
b |
0 |
pm + b pm−1 |
+...+ b |
m |
|
|
|||
W (P)зам |
= |
|
1 |
|
|
, |
(1.1) |
||||
a |
|
pn + a |
|
pn−1 |
+...+ a |
|
|||||
|
|
0 |
1 |
n |
|
||||||
|
|
|
|
|
|
|
|
||||
где P − параметр Лапласа.
В основе критерия устойчивости лежит использование характеристического уравнения (знаменателя передаточной функции, в замкнутом состоянии приравненного к нулю)
a pn + a pn−1 +...+ a |
n |
= 0. |
|
|
(1.2) |
|||||
0 |
1 |
|
|
|
|
|
|
|
||
Для характеристического уравнения (1.2) составим квадратичную матри- |
||||||||||
цу коэффициентов, содержащую n строк и n столбцов: |
|
|
|
|||||||
|
a1 |
a3 |
a5 |
... |
|
0 |
|
0 |
|
|
|
|
|
|
|
||||||
|
a0 |
a2 |
a4 |
... |
0 |
|
0 |
|
|
|
|
0 |
a1 |
a3 |
... |
|
0 |
|
0 |
|
|
|
0 |
a0 |
a2 |
... |
|
0 |
|
0 |
. |
(1.3) |
|
|
|
|
|
|
|
|
|
|
|
|
... |
... |
... |
... |
|
0 |
0 |
|
|
|
|
0 |
0 |
0 |
... an−1 |
0 |
|
|
|||
|
0 |
0 |
0 |
... |
|
an−2 |
0 |
|
|
|
По диагонали от левого верхнего до правого нижнего углов выписываются все коэффициенты по порядку от a1 до an . Каждая строка дополняется коэффициентами с нарастающими индексами слева направо так, чтобы чередова-
6
лись строки с нечётными и чётными индексами. В случае отсутствия данного коэффициента, а также если индекс его меньше нуля или больше n, на его месте пишется нуль.
АСР считается устойчивой, если при a0 > 0 все n определителей Гурвица, получаемых из квадратной матрицы коэффициентов больше нуля.
Первые определитель
1 = a1 > 0. |
|
|
|
|
|
(1.4) |
||||
Второй определитель |
|
|
|
|
|
|
|
|
|
|
2 |
= |
|
a3 |
|
. |
|
|
(1.5) |
||
|
a1 |
|
|
|
||||||
|
|
|
a |
a |
2 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
Третий определитель |
|
|
|
|
|
|
|
|
|
|
|
|
a1 |
a3 |
|
|
|
a5 |
|
|
|
|
|
|
|
|
|
|
||||
3 |
= |
a0 |
a2 |
|
|
|
a4 |
. |
(1.6) |
|
|
|
0 |
a1 |
|
|
|
a3 |
|
|
|
И т.д.
Последний определитель включает в себя всю матрицу. Но так как в последнем столбце матрицы все элементы, кроме нижнего, равны нулю, то последней определитель Гурвица выражается через предпоследний следующим образом:
n = n−1an . |
(1.7) |
Однако в устойчивой системе предпоследний определитель |
n−1 тоже |
должен быть положительным. В связи с чем, условие положительности последнего определителя сводится к условию an > 0 , т.е. к положительности свободного члена характеристического уравнения.
Задание
Проанализировать устойчивость АСР, используя критерий Гурвица. Исходные данные для расчёта и структурная схема АСР в соответствии с вариантом представлены в приложении. Расчёты необходимо провести для ПИ и ПИД регуляторов. Параметры регулятора выбираются студентом экспериментальным путём, k рег задаётся из диапазона 0,01…50, а tи и tпр из диапазона 1…100,
исходя из требования устойчивости. Работа выполняется в среде MathCAD.
Содержание отчёта
•Название и цель лабораторной работы.
•Выводы по расчёту устойчивости каждой АСР в соответствии с критерием Гурвица.
•Вывод о влиянии параметров регулятора на качество и устойчивость исследуемых АСР.

7
Лабораторная работа № 2 Исследование устойчивости АСР на основе критерия Михайлова
(D –разбиение)
Цель работы: провести анализ устойчивости системы согласно критерию Михайлова
Краткие теоретические сведения
Передаточная функция АСР в замкнутом состоянии имеет вид
|
b |
0 |
pm + b pm−1 |
+ ...+ b |
m |
|
|
|||
W (P)зам = |
|
1 |
|
|
, |
(2.1) |
||||
a |
|
pn + a |
|
pn−1 |
+ ...+ a |
|
||||
|
0 |
1 |
n |
|
||||||
|
|
|
|
|
|
|
||||
где P − параметр Лапласа. |
|
|
|
|
|
|
|
|
|
|
Характеристическое уравнение имеет вид |
|
|
|
|||||||
D(P) = a0 pn + a1 p n−1 + ... + an . |
(2.2) |
|||||||||
Сделаем переход в частотную область заменой p = jω , где |
ω − угловая |
|||||||||
частота колебаний, соответствующих чисто мнимому корню характеристического уравнения.
Раскладывая характеристическое уравнение (2.2) на действительную и
мнимую части, получим |
|
|
|
D( jω) = Re(ω) + j Im(ω), |
(2.3) |
||
где вещественная часть будет содержать чётные степени ω |
|
||
Re(ω) = a − a |
ω2 +..., |
(2.4) |
|
n |
n−2 |
|
|
а мнимая будет содержать нечётные степени ω |
|
||
Im(ω) = a |
ω − a ω3 +.... |
(2.5) |
|
n |
−1 |
n−3 |
|
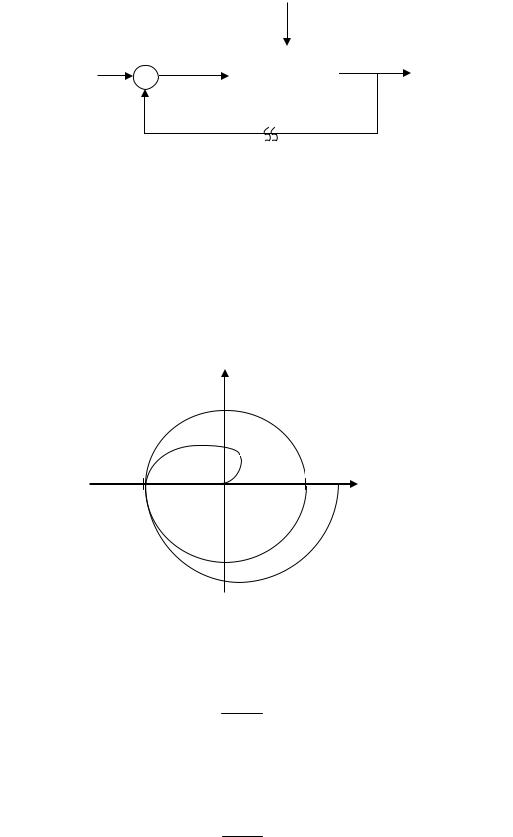
Критерий устойчивости: для устойчивости системы n – го порядка необходимо и достаточно, чтобы вектор D( jω) , описывающий кривую на плоскости Re, jIm, при изменении ω от 0 до ∞ обходил последовательно против часовой стрелки все квадранты и уходил в бесконечность в квадранте n (рис.2.1).
n=2 Im(ω)
Re(ω)
ω=0
n=3
Рис. 2.1 Устойчивые системы 2-го и 3-го порядков, согласно критерию Михайлова
8
Задание
Проанализировать устойчивость АСР, используя критерий Михайлова. Исходные данные для расчёта и структурная схема АСР в соответствии с вариантом представлены в приложении. Расчёты необходимо провести для ПИ и ПИД регуляторов. Параметры регулятора выбираются студентом экспериментальным путём, задаётся из диапазона 0,01…50, а tи и tпр из диапазона
1…100, исходя из требования устойчивости. Работа выполняется в среде MathCAD.
Содержание отчёта
•Название и цель лабораторной работы.
•Годографы Михайлова исследуемых АСР.
•Выводы по устойчивости каждой АСР в соответствии с критерием Михайлова.
•Вывод о влиянии параметров регулятора на качество и устойчивость исследуемых АСР.
Лабораторная работа № 3 Исследование устойчивости АСР на основе критерия Найквиста
Цель работы: провести анализ устойчивости системы согласно критерию Найквиста
Краткие теоретические сведения
Особенностью данного метода является то, что вывод об устойчивости или неустойчивости АСР в замкнутом состоянии делается в зависимости от вида амплитудно-фазовой частотной характеристики АСР в разомкнутом состоянии. Кроме того, помимо устойчивости данный метод позволяет оценить некоторые качественные показатели АСР в замкнутом состоянии, например запас устойчивости.
Передаточная функция АСР в разомкнутом состоянии имеет вид
|
|
b |
0 |
pm + b pm−1 |
+...+ b |
m |
|
|
|||
W (P) раз |
= |
|
1 |
|
|
, |
(3.1) |
||||
a |
|
pn + a |
|
pn−1 |
+...+ a |
|
|||||
|
|
0 |
1 |
n |
|
||||||
|
|
|
|
|
|
|
|
||||
где P − параметр Лапласа. |
|
|
|
|
|
|
|
|
|
|
|
Сделаем переход в частотную область в выражении (3.1) заменой |
p = jω , |
||||||||||
где ω − угловая частота колебаний, соответствующих чисто мнимому корню характеристического уравнения.
Получим АФЧХ системы в разомкнутом состоянии
W( jω) раз = Re(ω) + j Im(ω), |
(3.2) |
где Re(ω) – вещественная часть; Im(ω) – мнимая часть.
9
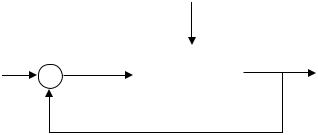
Структурная схема АСР в общем виде в разомкнутом состоянии представлена на рис.3.1.
|
|
|
|
f (t) |
|
g(t) |
|
x(t) |
|
|
y(t) |
|
W(P) |
|
|||
|
|
раз |
|
||
|
|
|
|||
|
|
|
|
|
|
Рис. 3.1 Структурная схема АСР в разомкнутом состоянии
Если подать на вход системы, представленной на рис.3.1, сигнал в виде гармонических колебаний с амплитудой Gmax и частотой ω , то в установившимся режиме на выходе управляемая величина будет изменяться
также по гармоническому закону |
y = Y |
sin(ωt +ψ ) с амплитудой |
Y |
, той |
|
max |
|
max |
|
же частоты и фазовым сдвигом ψ . |
|
|
|
|
В данном случае возможно три варианта:
1 АФЧХ проходит через точку с координатами (-1; 0) (рис.3.2).
Im(ω)
–1 |
+1 Re(ω) |
Рис. 3.2 АФЧХ системы находящийся на гране устойчивости
При этом
Ymax = 1.
Gmax
Такая система находится на грани устойчивости.
2АФЧХ охватывает точку с координатами (-1; 0) (рис.3.3). При этом
Ymax < 1.
Gmax
10
Такая система неустойчива.
Im(ω)
–1 |
+1 Re(ω) |
Рис. 3.3 АФЧХ неустойчивой системы
При этом
Ymax < 1.
Gmax
Такая система неустойчива.
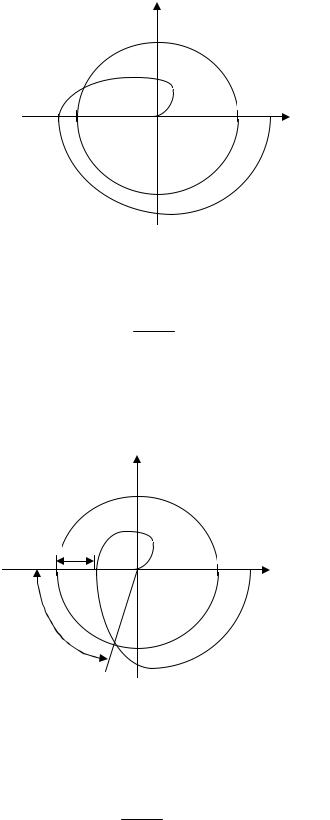
3 АФЧХ не охватывает точку с координатами (-1; 0) (рис.3.4).
Im(ω)
–1 |
а |
+1 |
Re(ω) |
|
γ
Рис. 3.4 АФЧХ устойчивой системы, где γ − запас устойчивости по фазе; a − запас устойчивости по амплитуде
При этом
Ymax < 1.
Gmax
Такая система устойчива.
11
Критерий устойчивости: для устойчивости системы в замкнутом состоянии необходимо и достаточно, чтобы АФЧХ системы в разомкнутом состоянии не охватывала точку с координатами (-1; 0).
Задание
Проанализировать устойчивость АСР, используя критерий Найквиста. Исходные данные для расчёта и структурная схема АСР в соответствии с вариантом представлены в приложении. Расчёты необходимо провести для ПИ и ПИД регуляторов. Параметры регулятора выбираются студентом экспериментальным путём, задаётся из диапазона 0,01…50, а tи и tпр из диапазона
1…100, исходя из требования устойчивости. Работа выполняется в среде MathCAD.
Содержание отчёта
•Название и цель лабораторной работы.
•АФЧХ исследуемых АСР.
•Выводы по устойчивости и качеству каждой АСР в соответствии с критерием Найквиста.
•Вывод о влиянии параметров регулятора на качество и устойчивость исследуемых АСР.

12
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Приложение |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f (t) |
|
|
|
|
|
||
g(t) |
|
|
x(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(t) |
|
|
|
|
Wрег (P) |
|
|
WИУ (P) |
|
|
|
Wоб (P) |
|
|
Wдат (P) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
Рис. 1 Структурная схема АСР |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 1 |
||
|
|
|
|
|
|
|
|
|
Варианты исходных данных |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Вариант |
|
|
|
|
|
|
|
|
|
|
|
Задание |
|
|
|
|
|
|
|
||||||||
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
Передаточные функции элементов АСР |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
WИУ (P) = kИУ ; Wоб (P) = |
|
|
|
|
|
kоб |
|
|
|
|
; |
|
|
|||||||||
|
|
|
|
|
(Tоб1 P +1)(Tоб2 P +1)(Tоб3 P |
+1) |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
1 |
|
|
Wдат (P) = kдат . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
Исходные данные для расчётов |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
1. |
kИУ |
= 5; kоб = 0,7 ; Tоб1 = 80 ; Tоб2 = 30; Tоб3 = 15 ; kдат |
= 1,8. |
|
|
|||||||||||||||||
|
|
|
|
|
2. |
kИУ |
= 10; kоб |
= 0,2 ; Tоб1 = 150; Tоб2 |
|
|
= 90; Tоб3 |
= 25; kдат = 7 . |
|
||||||||||||||
|
|
|
|
|
3. |
kИУ |
= 0,9 ; kоб |
= 3; Tоб1 = 55 ; Tоб2 = 80; Tоб3 = 35 ; kдат |
= 1. |
|
|
|
|||||||||||||||
|
|
|
|
|
4. |
kИУ |
= 15; kоб |
= 0,9 ; Tоб1 = 40 ; Tоб2 |
= 30; Tоб3 = 90 ; kдат |
= 3. |
|
|
|||||||||||||||
|
|
|
|
|
5. |
kИУ |
= 0,5 ; kоб |
= 5 ; Tоб1 = 200 ; Tоб2 |
= 45 ; Tоб3 = 50 ;kдат |
= 0,95. |
|
|
|||||||||||||||
|
|
|
|
|
Передаточные функции элементов АСР |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
WИУ (P) = kИУ ; Wоб (P) = |
kоб |
|
|
; |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tоб P +1 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
Wдат (P) = |
|
k |
дат |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
2 |
|
|
Tдат P +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
Исходные данные для расчётов |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
1. |
kИУ |
= 13; kоб |
= 0,4 ; Tоб |
= 250 ; kдат |
|
|
= 1; Tдат = 10. |
|
|
|
|
|
||||||||||
|
|
|
|
|
2. |
kИУ |
= 1; kоб = 2; Tоб = 130; kдат = 2,5; Tдат = 8 . |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
3. |
kИУ |
= 0,5 ; kоб |
= 0,9 ; Tоб |
= 60 ; kдат |
|
= 5; Tдат = 30 . |
|
|
|
|
|
|||||||||||
|
|
|
|
|
4. |
kИУ |
= 7 ; kоб = 0,55; Tоб |
= 90; kдат = 0,85 ; Tдат |
= 18. |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
5. |
kИУ |
= 0,7; kоб |
= 0,1; Tоб |
= 175; kдат |
|
|
= 10 ; Tдат |
= 45. |
|
|
|
|
|
|||||||||