

1268
.pdfуменьшаются обороты. Для различных значений тока якоря двигателя определить скорость вращения.
Далее реостатом Rв уменьшить ток возбуждения двигателя до значения iв=0,8iв.н и повторить опыт. Результаты занести в табл. 12 и построить характеристики .
Для снятия скоростной характеристики при пониженном напряжении питания необходимо уменьшить напряжение до 90 В и, поддерживая его на неизменном уровне при номинальном токе возбуждения, снять скоростную характеристику так же, как в п.2. Данные эксперимента занести в табл. 13 и по ним построить скоростную характеристику при пониженном напряжении питания.
Таблица 13
Ia, А
n, об/мин
Для снятия регулировочной характеристики необходимо включить двигатель в той же последовательности, что и в предыдущем случае.
Установить номинальное значение тока возбуждения на холостом ходу. Далее, увеличивая ток якоря, поддерживать неизменной скорость вращения путем уменьшения тока возбуждения. Данные опыта занести в табл. 14 и построить регулировочную характеристику двигателя.
Таблица 14
iв, A
Iа, А
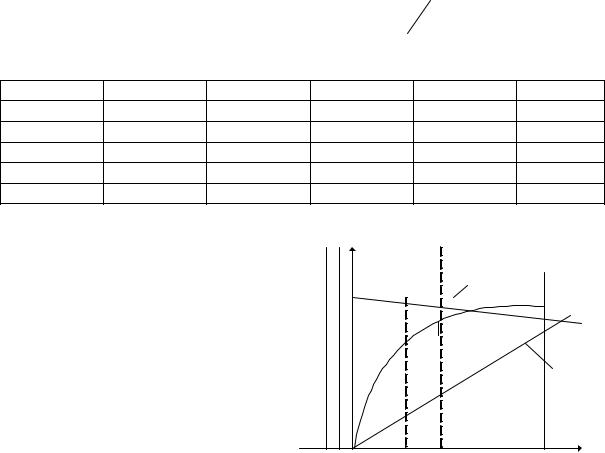
Рабочие характеристики представляют собой зависимости частоты вращения, потребляемого тока, полезного (нагрузочного) момента и КПД от полезной мощности n=f(P2), I=f(P2), М=f(P2), η=f(P2) при неизменных значениях напряжения питания и тока воз-
буждения U=const, iв=const.
Для получения данных, необходимых для построения рабочих характеристик, включают двигатель и нагружают его до номинального тока нагрузки при номинальной частоте вращения. При проведении эксперимента необходимо измерять: напряжение питания двигателяUд, ток якоря двигателя Iа, ток возбуждения двигателя Iв, скорость вращения n, напряжение генератора Uг, ток генератора Iг .
Разгружая двигатель до холостого хода через приблизительно
31
равные интервалы тока нагрузки, фиксируют значения перечисленных величин и заносят их в табл. 15.Необходимо снять не менее пяти показаний.
Рассчитав значения потребляемой мощности Р1=UдIд, полезной мощности Р2=UгIг/ηг и КПД двигателя (%) ( 1 2 )100, строят рабочие
характеристики в одних осях координат (рис.25).
Таблица 15
Iа, А
iв, А
Uд, В
n, об/мин
Uг, В
Iг, А
Дать количественную оценку скоростной характеристике, рассчитав номинальное изменение частоты вращения двигателя при изменении нагрузки от нуля до номинального значения.
Определив номинальные данные двигателя по его рабочим характеристикам, их следует сравнить с паспортными данными двигателя и сделать вывод об их соответствии.
n,I,M,? |
|
n |
|
? |
|
|
I |
0,5 P2,H |
P2 |
P2,H |
|
Рис.25. Рабочие характеристики дви- |
|
гателя постоянного тока независимо- |
|
го возбуждения |
|
Контрольные вопросы
1.Почему нельзя пускать двигатель при включенном в его цепь возбуждения регулировочном сопротивлении?
2.Какие способы регулирования частоты вращения двигателя независимого возбуждения вы знаете?
3.Почему регулировочная характеристика двигателя независимого возбуждения криволинейна?
4.Какие характеристики двигателя независимого возбуждения называются рабочими?
5.Почему при увеличении нагрузки на вал двигателя независи-
32
мого возбуждения уменьшается частота вращения?
6. Как изменится частота вращения двигателя постоянного тока независимого возбуждения при уменьшении питающего напряжения?
Лабораторная работа №6
Испытание двигателя последовательного возбуждения
Цели работы: изучение свойств двигателей последовательного возбуждения, способов пуска и регулирования скорости вращения.
Содержание работы
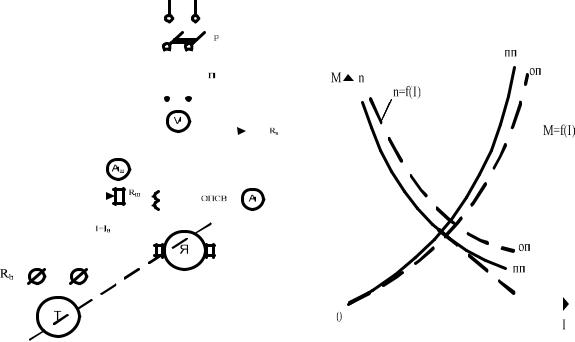
У двигателей с последовательным возбуждением обмотка возбуждения включена последовательно с обмоткой якоря (рис. 26), и по обеим обмоткам проходит один и тот же ток, т. е. iB =Ia =I, а свойства его существенно отличаются от свойств машин параллельного возбуждения.
Магнитный поток ненасыщенной машины находится в прямой зависимости от тока нагрузки, и поэтому скорость вращения двигателя с последовательным возбуждением сильно меняется в зависимости от нагрузки.
n |
U Ia (ra rB RП ) |
|
U Ia (ra rB RП ) |
|
|
|
|||
|
CEФ |
. |
||
|
|
KE Ia |
||
С увеличением нагрузки увеличивается магнитный поток и уменьшается скорость, поэтому скоростная характеристика данного двигателя имеет резко падающий вид (рис. 27). Однако при значительных нагрузках происходит насыщение стали машины и поток становится почти постоянным. В этом случае характеристика п = =f(Ia) спрямляется. При уменьшении нагрузки будут уменьшаться ток Iа и магнитный поток Ф, а скорость вращения возрастает. При значительном снижении нагрузки двигатель развивает очень высокую скорость, что может привести к разрушению машины. Поэтому двигатели последовательного возбуждения не разрешается эксплуатировать без нагрузки, так как двигатель в этом случае идет «в разнос».
33
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 27. Скоростная характери- |
|
Рис. 26. Электрическая схема |
||||||||||||||||||||
двигателя постоянного тока по- |
стика двигателя постоянного тока |
|||||||||||||||||||
следовательного возбуждения |
последовательного возбуждения |
|||||||||||||||||||
Момент на валу двигателя пропорционален току и магнитному потоку: М = См Iа Ф =СМ'Iа2, поэтому характеристика М=f(Iа) приближается к параболе (см. рис. 27).
Пуск двигателя последовательного возбуждения производится также с пусковым реостатом Rп, включаемым последовательно с якорем и обмоткой возбуждения, который по мере разгона двигателя выводится из якорной цепи.
Регулирование скорости двигателя в данной работе производится ослаблением поля главных полюсов путем шунтирования обмотки возбуждения сопротивлением Rш.
Рабочие свойства двигателя последовательного возбуждения определяются характеристиками п = f (Iа) и М = f(Iа), которые следует снимать при условии U = const для полного поля и ослабления на 50 %.
Способность двигателей с последовательным возбуждением развивать значительные вращающие моменты, особенно при пуске, определяет область применения их: в подъемно-транспортных устройствах, в качестве крановых двигателей и на электрическом транспорте как тяговых двигателей.
34
Лабораторная работа №7
Электрическое торможение двигателей постоянного тока
Цель работы: помимо механического торможения, основанного на трении, для быстрой остановки двигателей широко используется электрическое торможение, являющееся предметом изучения в данной работе.
Теоретические положения
Одним из режимов работы машины постоянного тока является тормозной, когда ее электромагнитный момент направлен в противоположную сторону по отношению к вращению якоря. Применяются три вида электрического торможения двигателей: динамическое, рекуперативное и торможение противовключением. Во всех трех ре-
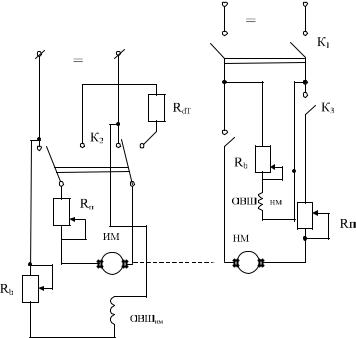
жимах двигатель переводится в генераторный режим. Электрическая схема экспериментальной установки для исследования всех трех режимов приведена на рис.28. Здесь ИМ испытуемая машина, которую будем переводить из двигательного режима в генераторный при различных способах торможения. НМ нагрузочная машина, которая создает для испытуемой машины момент (тормозной или вращающий) в зависимости от режима ИМ.
Динамическое торможение производится отключением с помощью ключа К3 обмотки якоря двигателя от сети и замыканием ее на тормозное сопротивление Rдт (рис. 28). При этом обмотка возбуждения двигателя остается включенной в сеть, т. е. Ф = const. Якорь машины, имея запас кинетической энергии, продолжает вращаться по инерции, и наводимая в его обмотке ЭДС создает в обмотке якоря ток, имеющий обратное по сравнению с током в двигательным режиме направление.
Теперь двигатель переводится в генераторный режим и отдает электрическую энергию тормозному сопротивлению Rдт.. Тормозной ток создает момент, направленный противоположно вращению якоря, т. е. тормозной момент:
M |
|
C |
I |
Ф С |
|
E |
a |
Ф С |
|
С |
|
nФ2 |
|
|
|
|
|
|
|
. |
|||||||
|
М r R |
|
|
|
|||||||||
|
Т |
|
M Т |
|
|
М |
|
Е |
r R |
||||
|
|
|
|
|
|
a СТ |
|
|
|
|
a СТ |
||
Из формулы момента видно, что с уменьшением скорости последний снижается, а с ростом тока при уменьшении тормозного сопротивления Rдт увеличивается. По существу теперь машина ИМ представляет собой генератор постоянного тока, работающий с уменьшающейся скоростью.
35
Уравнение электрического равновесия машины в двигательном режиме имеет вид
U = Ea + IaRa, |
(9) |
а при отключении двигателя от сети и переходе его в режим динами-
ческого торможения выражение (9) |
преобразуется. |
|
|||||
|
-Ea = IaRa, |
(10) |
|||||
|
-Iа = |
Ea |
, |
|
|
(11) |
|
|
|
|
|
||||
|
|
|
Ra |
|
|
|
|
IT |
|
|
Ea |
|
, |
(12) |
|
|
|
|
|||||
|
|
ra RCT |
|
||||
откуда видно, что направление тока изменяется на противоположное. Следовательно, машина переходит в генераторный режим, а
электромагнитный момент становится тормозным. ЭДС машины пропорциональна скорости вращения
Eа = СеФn.
Поэтому скоростная характеристика машины в тормозном (генераторном) режиме линейна. Для ее построения достаточно двух точек. Координаты первой точки (ток и скорость вращения фиксируются при переключении двигателя от сети на тормозное сопротивление). Обе координаты второй точки равны нулю, т.е. машина остановилась, ЭДС и ток якоря равны нулю.
Рис.28. Электрическая схема экспериментальной установки для исследования тормозных режимов двигателя постоянного тока независимого возбуждения
36
|
На рис. 27 точка а на естественной характеристике соответствует |
|||||
номинальному двигательному режиму. При переходе в тормозной |
||||||
режим рабочая точка перемещается в точку б тормозной характери- |
||||||
стики и по этой характеристике движется к началу координат. |
|
|||||
|
Если сопротивление тормозного резистора уменьшить, то при пе- |
|||||
реходе в тормозной режим возникнет больший бросок тока (точка в), |
||||||
что обеспечит более интенсивное торможение. |
|
|
||||
|
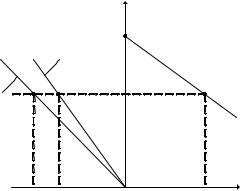
N |
|
Две электромеханические ха- |
|||
|
|
рактеристики двигателя постоянно- |
||||
|
n0 |
|
го тока независимого возбуждения |
|||
|
RdT1 |
|
в режиме динамического торможе- |
|||
|
|
ния (1 и 2) представлены на рис.29. |
||||
|
|
|
||||
RdT2 |
a |
|
Характеристики |
соответствуют |
||
? |
|
|||||
|
различным значениям сопротивле- |
|||||
|
b |
|
||||
|
|
|
ния тормозного резистора. На нем |
|||
|
|
|
не отображено изменение скорости |
|||
-Ia |
|
IH |
во время торможения. Такую зави- |
|||
IH |
симость n = f(t) удобно снять с по- |
|||||
Рис.29. Электромеханические ха- |
|
мощью осциллографа, но мы огра- |
||||
|
ничимся измерением времени тор- |
|||||
рактеристики двигателя постоян- |
|
можения от начала торможения до |
||||
ного тока независимого возбужде- |
||||||
ния в режиме динамического тор- |
полной |
остановки |
машины |
при |
||
можения при различной величине |
включении резисторов с различ- |
|||||
тормозного сопротивления (Rдт1 > |
ными сопротивлениями. |
|
||||
Rдт2) |
|
Первоначально полагаем, |
что |
|||
двигатель работал в номинальном режиме (см. рис.29, точка а). После |
||||||
отключения его от сети и замыкания на тормозное сопротивление Rдт1 |
||||||
ток якоря меняет полярность и рабочая точка перемещается во второй |
||||||
квадрант (точка б, см. рис.29). Теперь двигатель перешел в генератор- |
||||||
ный режим, и от этой точки б мы начинаем производить измерения |
||||||
тока и скорости вращения. |
|
|
|
|
|
|
|
Как следует из формулы (11), ток пропорционален скорости |
|||||
вращения, поэтому механическая характеристика тормозного режима |
||||||
имеет вид прямой линии, направленной из точки а в начало коорди- |
||||||
нат. |
Если уменьшить величину тормозного сопротивления до Rдт2, то |
|||||
|
||||||
при переводе машины из двигательного режима в генераторный рабо- |
||||||
чий процесс машины будет характеризоваться точкой в. Бросок тока |
||||||
при этом будет больше, чем в первом случае, и первоначальный тор- |
||||||
мозной момент тоже увеличится, а время торможения уменьшится. |
||||||
37

Торможение с отдачей энергии в сеть (рекуперация) основа-
но тоже на переводе двигателя в генераторный режим. При этом энергия не теряется на нагрев резистора, а возвращается (рекуперируется) в сеть. Для перевода двигателя в генераторный режим необходимо, чтобы ДС Еа , наводимая в обмотке якоря, была больше напряжения сети (Ea > U). При этом ток и момент изменяют свое направление:
Ia U Ea Ia . ra
ЭДС Еа =СЕ пФ можно увеличивать сверх напряжения питания U, или за счет повышения скорости вращения п, или посредством усиления магнитного потока Ф.
В нашем примере перевод испытуемого двигателя в генераторный режим осуществляется вторым способом путем увеличения тока возбуждения испытуемого двигателя.
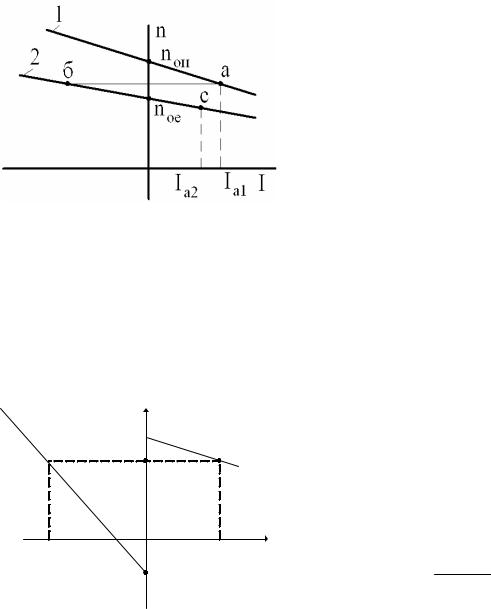
Первоначально испытуемая машина (ИМ) работает в двигательном режиме при ослабленном токе возбуждения (точка а на искусственной электромеханической характеристике 1) (см. рис.30), а нагрузочная машина (НМ) в генераторном, т.е. создает тормозной момент для испытуемой машины. Для перевода ИМ в генераторный режим необходимо увеличить ток возбуждения ИМ. Это осуществляется замыканием рубильника Р, т.е. выведением из цепи возбуждения ИМ регулировочного сопротивления Rв. Теперь ЭДС испытуемой машины (ИМ) больше напряжения питающей сети, и машина отдает энергию в сеть, т.е. работает в режиме генератора (точка б на естественной характеристике 2, см. рис.30). Торможение будет происходить до тех пор, пока скорость двигателя (n) не станет меньше скорости идеального холостого хода (no1), соответствующей этой характеристике n < no1, и не установится равновесие (точка с на характеристике 2, см.
рис.30).
U = E + IaRa.
При этом двигатель не остановится, а будет вращаться с меньшей скоростью, чем в точке а на характеристике 1. Если тормозной момент на валу двигателя останется прежним, то ток якоря при новой установившейся скорости будет меньше, чем в начале торможения, поскольку момент пропорционален магнитному потоку возбуждения, который был увеличен в начале торможения.
На электрическом транспорте, где используются двигатели последовательного возбуждения, рекуперативное торможение тяговых двигателей подвижного состава осуществляется увеличением тока возбуждения двигателя, что приводит к увеличению ЭДС двигателя
38
до величины, превосходящей напряжения питающей сети.
|
Торможение противовключе- |
|
|
нием (противотоком) осуществляет- |
|
|
ся изменением полярности питаю- |
|
|
щего напряжения по схеме (см. рис. |
|
|
28). К двигателю, работающему в |
|
|
номинальном режиме (точка а, см. |
|
|
рис.31), переключателем К подается |
|
Рис.30. Электромеханические |
напряжение обратной полярности. В |
|
результате этого машина переходит |
||
характеристики двигателя |
||
на другую характеристику (точка б, |
||
постоянного тока независимого |
||
возбуждения в режиме рекупе- |
см. рис.31), ток в цепи якоря меняет |
|
ративного торможения |
знак, изменится и направление элек- |
тромагнитного момента, который будет действовать теперь против вращения якоря, т. е. будет тормозным.
n
n0
nH
-Ia=-2IaH |
IaH |
Ia |
Рис.31. Электромеханические характеристики двигателя постоянного тока независимого возбуждения в режиме торможения противовключением
Особенность этого способа торможения заключается в том, что при смене полярности питающего напряжения наводимая в двигателе ЭДС имеет одинаковое направление с напряжением сети. При этом ток в цепи якоря будет
Ia U Ea . ra
Во избежание увеличения тока якоря Iа выше допустимого значения на время торможения противовключением в цепь якоря включается добавочное сопротивление и ток в нем определяется уже соотношением
Ia |
U Ea |
||
r |
R |
. |
|
|
a |
доб |
|
Величина добавочного сопротивления в этом случае должна быть больше, чем при динамическом торможении, поскольку ЭДС двигателя и напряжение сети направлены согласованно. После останова (точка в, см. рис. 31) двигатель должен быть своевременно отключен от сети и заторможен механическим тормозом, чтобы не про-
39
изошло реверсирования.
Кинетическая энергия машины расходуется на нагрев тормозного сопротивления. Скорость торможения будет большей, чем при динамическом торможении, ибо она зависит от величины тока якоря и магнитного потока возбуждения, предельные значения которых определены конструкцией машины. Отличие торможения противовключением от динамического состоит в том, что энергия, расходуемая на тормозном сопротивлении, в первом случае больше, чем во втором. Дополнительная энергия на нагрев тормозного резистора берется из сети, поэтому торможение противовключением менее экономично, чем динамическое и рекуперативное.
Необходимо снять и построить зависимость времени торможения от величины тормозного сопротивления.
Торможение противовключением может применяться для любых типов двигателей постоянного тока.
Задание к работе
1.Снять, рассчитать и построить зависимости тормозного тока
имомента от скорости Ia=f(n); М=f(n) при динамическом торможении. Измерить время торможения при двух различных значениях тормозного сопротивления tT=f(RCT).
2.Снять и построить электромеханическую характеристику испытуемой машины в режиме рекуперативного торможения.
3.Снять и построить электромеханическую характеристику испытуемой машины в режиме торможения противовключением.
Порядок выполнения работы
1.Из цепей возбуждения обеих машин вывести полностью регулировочные реостаты Rв (см. рис. 28).
2.В якорные цепи обеих машин ввести полностью пусковые реостаты Rп.
3.Ключами К1 и К2 подать напряжение на обмотки возбуждения (ОВШИМ и ОВШНМ) обеих машин. После этого ключом К4 подать напряжение в якорную цепь нагрузочной машины НМ. По мере разгона машин (их валы соединены муфтой) вывести из якорной цепи машины НМ пусковой реостат Rп.
4.Вывести из якорной цепи испытуемой машины ИМ пусковой резистор Rп. Теперь испытуемая машина работает в генераторном режиме.
5.Ключом К3 присоединить тормозной резистор Rдт к якорной
40