

573
.pdfВиды управления пневмораспределителями
От оператора |
Кнопкой |
Рычагом |
Педалью |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Механическое |
|
Электро- |
|
|
|
Пневмати- |
|
|
|
Электро- |
|
||||||||||||||||||||||||||||||||||
|
|
|
магнитное |
|
|
|
ческое |
|
пневматическое |
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Толкателем |
|
|
|
Без ручного |
|
|
|
Повышением |
|
|
|
Повышением |
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
дублирования |
|
|
|
давления |
|
|
|
|
|
давления |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Роликом |
|
|
С ручным |
|
|
Понижением |
|
|
Понижением |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
дублированием |
|
|
давления |
|
|
|
давления |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ломающимся
рычагом
Рис. 4
Рис.4. Основные виды управления распределителями
1.4. Регулирующая пневмоаппаратура
Регулирующая аппаратура предназначена для изменения давления и расхода сжатого воздуха путем регулирования величины открытия проходного сечения. К этой группе пневмоаппаратуры относятся редукционные и предохранительные пневмоклапаны, дроссели.
Пневмодроссели предназна-
чены для изменения расхода путем создания местного гидравлического сопротивления потоку сжатого воздуха.
11

Различают дроссели постоянные, сопротивление которых (величина проходного сечения, форма или длина канала) не может быть изменено в процессе эксплуатации, и переменные (регулируемые), сопротивление которых можно изменять настройкой. Дроссели используют главным образом как регуляторы скорости (РС) пневмодвигателей и скорости заполнения или опорожнения емкостей в целях создания временных задержек.
Дроссели обычно выполняют в виде отдельных регулируемых устройств и часто снабжают обратным клапаном (рис. 5), устанавливаемым параллельно дросселирующему узлу. Они дросселируют поток воздуха только в одном направлении, а поток воздуха противоположного направления пропускают с небольшим сопротивлением, создаваемым обратным клапаном.
Пневмоклапаны редукционные с ручной и дистанционной на-
стройкой предназначены для автоматического поддержания давления сжатого воздуха на заданном уровне. На рисунке 6 представлен редукционный пневмоклапан типа B57-I6.
Сжатый воздух подводится к присоединительному отверстию П, отвод стабильного давления производится через отверстие О. Настройка пневмоклапана осуществляется при помощи винта 1, действующего через пружину 2 и толкатель 3 на дроссельный клапан 4. Выходное давление, действующее на мембрану 5 снизу, уравновешивается усилием пружины 2.
Рис. 6. Редуктор
При нарушении выходного давления указанное равновесие нарушается, мембрана 5 прогибается и через толкатель 3 отжимает дроссельный клапан 4, увеличивая проход воздуха и, тем самым, его расход и давление. При повышении давления на выходе пружина 2 сжимается, дроссельный клапан 4 прикрывается, что приводит к уменьшению расхода и давления сжатого воздуха.
12
1.5. Аппаратура подготовки воздуха
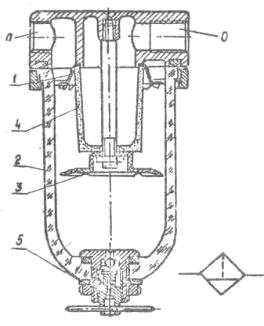
Устройства для очистки воздуха подразделяют по назначению на фильтры (для очистки от механических загрязнений), влагоотделители (для очистки от воды и масла в жидком состоянии) и осушители (для очистки от влаги в парообразном состоянии). Применяются комбинации этих устройств, например, фильтры-влагоотделители. На рисунке 7 приведена конструкция и условное обозначение фильтравлагоотделителя с ручным отводом конденсата типа B41-1.
Сжатый воздух, подведенный к отверстию П, попадает на крыльчатку 1 и движется по винтовой линии. Капли воды и масла, а также крупные твердые частицы, находящиеся в потоке воздуха, под действием центробежных сил отбрасываются на стенки стакана и стекают вниз в спокойную зону, отделенную заслонкой 3. Очищенный от жидкой влаги воздух проходит через металлокерамический фильтр 4, очищается от твердых
Рис. 7. Фильтр загрязнений и поступает к выходному отверстию О.
Удаление воды и других загрязнений из фильтра происходит под действием сжатого воздуха при открытии ручного запорного клапана 5. Прозрачный материал стакана 2 позволяет следить за количеством конденсата и производить своевременный его отвод.
Маслораспылители предназначены для внесения в сжатый воздух распыленного масла с целью смазки трущихся поверхностей пневматических устройств.
13
1.6. Системы управления исполнительным устройством
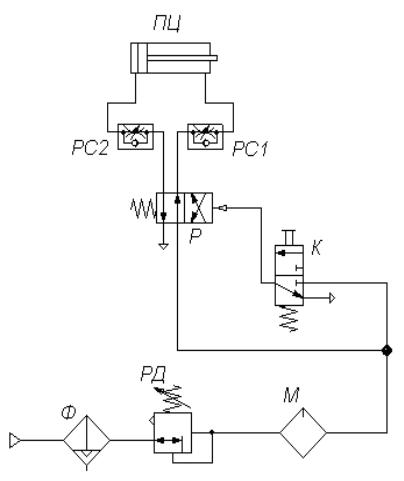
На рисунке 8 показана схема управления движением «впередназад» пневмоцилиндра ПЦ. Сжатый воздух из магистрали через филътр-влагоотделитель Ф, регулятор давления РД и маслораспылитель М поступает к каналам питания клапана К и распределителя Р. Под действием разности сил давления (пневматической пружины) распределитель находится в положении, при котором сжатый воздух из магистрали поступает в штоковую полость пневмоцилиндра, а поршневая полость связана с атмосферой. Полость управления через выходной канал клапана К связана с атмосферой. При нажиме на кнопку клапан К переключается в положение, при котором атмосфера отсекается, а выход связывается с магистралью. Сжатый воздух, поступая в полость управления распределителя Р, переключает его в положение, показанное справа на его условном изображении. При этом поршневая полость пневмоцилиндра ПЦ связывается с магистралью, а штоковая – с атмосферой; поршень движется направо, выдвигая шток. После отпускания клапана распределитель переключается в исходное положение, так как сжатый воздух из полости управления выходит в атмосферу через канал в клапане К. Поршень пневмоцилиндра движется налево и шток втягивается. Регуляторы скорости PC1 и РС2 (дроссель с обратным клапаном) позволяют регулировать скорость поршня в прямом (PC1) и обратном (РС2) направлениях.
Схема, показанная на рисунке 9, осуществляет движение штока пневмоцилиндра ПЦ вперед при нажатии на клапаны К1 или К2 и движение штока ПЦ назад при нажатии клапана К3. Логический клапан К-ИЛИ является разделительным (при подаче сигнала от клапана K1 он перекрывает канал, ведущий к клапану K2, связанный с атмосферой, и наоборот).
На рисунке 10 – движение штока ПЦ вперед-назад осуществляется автоматически от концевых переключателей П1 и П2 при включенном тумблере Т. Остановка ПЦ в исходном положении производится при отключении тумблера Т.
Рисунок 11 показывает движение штока ПЦ вперед-назад (аналогичные со схемой на рисунке 10), с выдержкой времени на выдвижение штока ПЦ за счет включения реле времени РВ.
14
На рисунке 12 – движение штока ПЦ вперед производится только при нажиме обеих кнопок К1 и К2, а движение назад – только при отпускании обеих этих кнопок.
На рисунке 13 – движение штока ПЦ вперед производится при нажиме любых двух из трех кнопок K1, K2, К3, а движение назад – при отпускании этих кнопок.
Рис. 8. Простая схема управления пневмоцилиндром
15
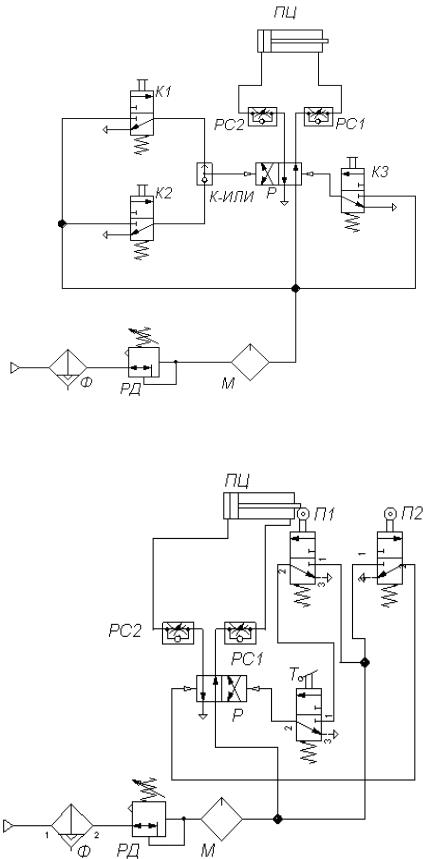
Рис. 9. Управление пневмоцилиндром с использованием логического клапана ИЛИ
Рис. 10. Путевое управление пневмоцилиндром
16
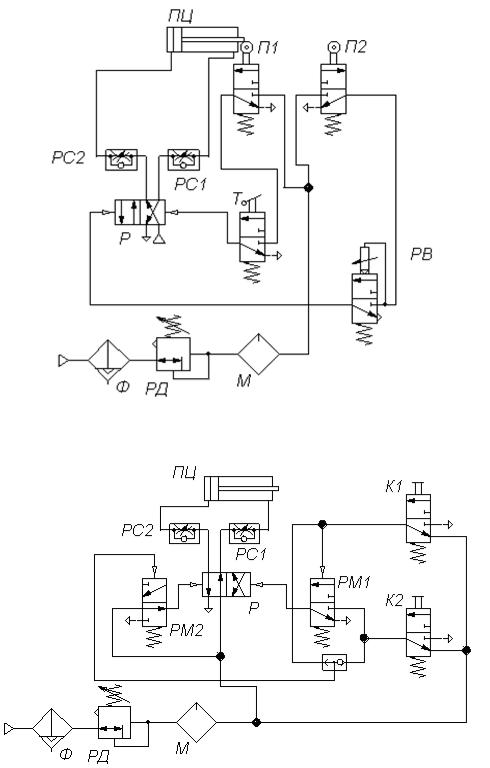
Рис. 11. Путевое управление пневмоцилиндром с использованием реле времени
Рис. 12. Логическое управление пневмоцилиндром
17
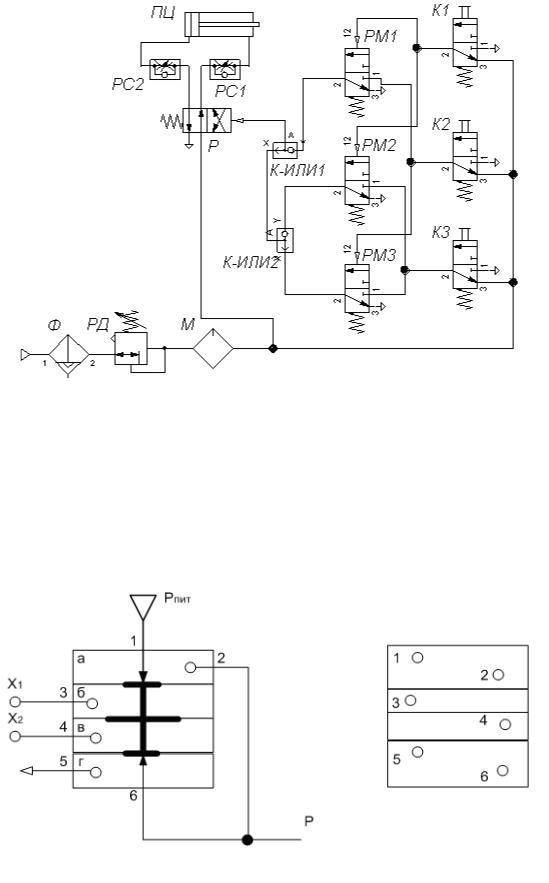
Рис. 13. Сложное логическое управление пневмоцилиндром
1.7. Конструкция пневматического реле УСЭППА
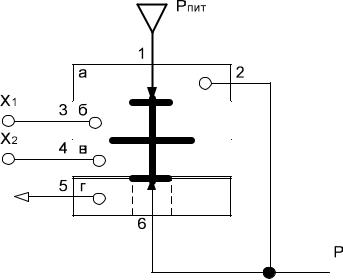
Реле универсальные трёхмембранные П1Р1 (Р-3Н) и П1Р3 (Р-3Ф) являются основными логическими элементами универсальной системы элементов промышленной пневмоавтоматики (УСЭППА), предназначенными для построения пневматических релейных схем. На рисунке 14 показано реле типа П1Р1.
Рис. 14. Трехмембранное пневмореле П1Р1
18
Реле состоит из четырёх камер а, б, в, г, разделённых тремя мембранами. Мембраны объединены жёстким центром в единый мембранный блок. Эффективные площади f двух крайних мембран меньше эффективной площади F средней мембраны. Камеры имеют шесть входных и выходных каналов 1–6. Перемещение жёсткого центра ограничено двумя упорами, являющимися соплами; торцы жёсткого центра являются заслонками. Верхняя а и нижняя г камеры имеют два входа и являются проточными. Средние камеры б, в – глухие.
В зависимости от соотношения величины управляющих сигналов Х1 и Х2 мембранный блок перемещается вверх или вниз. В первом случае он закрывает сопло (пневмоконтакт) 1 и открывает сопло 6 , выходное давление Р при этом становится равным атмосферному, т. к. воздух из выходного канала стравливается в атмосферу через канал 5. В другом случае сопло 6 закрывается и открывается сопло 1, при этом выходное давление становится равным давлению питания
Рпит .
Характерной особенностью пневмореле является наличие положительной обратной связи. Она заключается в том, что при движении мембранного блока вверх и перекрытии сопла 1 на мембранный блок перестаёт действовать сила Р · f , что способствует дальнейшему передвижению мембранного блока к соплу 1. При движении же мембранного блока вниз и при открытии сопла 1 на мембранный блок начинает действовать сила Р · f , что способствует передвижению мембранного блока к соплу 6. Положительная обратная связь увеличивает быстродействие реле.
В дискретных схемах, где используется пневмореле, один из управляющих сигналов является постояннодействующим и выбирается равным 0,3 · Рпит (для камеры б) или 0,7 · Рпит (для камеры в). Это постоянное давление называют подпором, и оно предназначено для фиксации мембранного блока в одном из крайних положений. На схемах камеры, в которых установлено давление подпора, заштрихованы. Другой управляющий сигнал (Х1 и Х2 в зависимости от схемы) является входным сигналом и может менять своё значение в процессе работы.
Входные и выходные сигналы пневмореле могут иметь только два значения, которые условно обозначаются «0» или «1». Под «0»
19
понимается давление воздуха от 0 до 0,2 · 105 Па (0,2 кгс/см2), под «1» – давление от 1,1 · 105 Па до Рпит .
На рисунке 15 изображена схема трёхмембранного пневматического реле ПIР3 , в котором, в отличие от реле ПIР1, под мембранным блоком расположена пружина, которая фиксирует мембранный блок в крайнем верхнем положении. Отметим, что пружина играет функцию давления подпора, вследствие чего обе камеры б и в могут быть использованы для подвода управляющих сигналов.
Рис. 15. Трехмембранное пневмореле П1Р3 с пружиной
1.8. Характеристики пневмореле
Пневмореле характеризуются следующими показателями:
1.8.1.Чувствительность, которая определяется абсолютной разностью величин переменного управляющего сигнала, соответствующего началу и концу набора (появление «1» на выходе), началу и концу сброса (появление «0»).
1.8.2.Гистерезис пневмореле (β), определяемый разницей между величинами переменного управляющего сигнала, соответствующими концу набора и концу сброса при появлении на выходе «0» и «1». Чувствительность и гистерезис пневмореле определяются по его статической характеристике.
1.8.3.Быстродействие пневмореле (время срабатывания), которое определяется временем с момента подачи управляющего сигнала до момента достижения заданного уровня выходного сигнала.
20