

75
.pdfАНАЛИЗ КИНЕМАТИЧЕСКОЙ
СХЕМЫ МЕТАЛЛОРЕЖУЩЕГО
СТАНКА
Методические указания к лабораторной работе по дисциплине «Станки и инструмент»
Федеральное агентство по образованию Сибирская государственная автомобильно-дорожная академия
(СибАДИ)
Кафедра «Конструкционные материалы и специальные технологии»
АНАЛИЗ КИНЕМАТИЧЕСКОЙ СХЕМЫ
МЕТАЛЛОРЕЖУЩЕГО СТАНКА
Методические указания к лабораторной работе по дисциплине «Станки и инструмент»
Составители Б. И. Калмин, М. С. Корытов (в авторской редакции)
Омск
СибАДИ
2012
УДК 621.9 ББК 34.63
Рецензент канд. техн. наук, доц. В. Н. Никитин.
Работа одобрена методической комиссией факультета «Автомобильный транспорт» в качестве методических указаний к лабораторной работе по дисциплине «Станки и инструмент» для студентов специальностей 190201, 190601.
Анализ кинематической схемы металлорежущего станка: Методические указания к лабораторной работе по дисциплине «Станки и инструмент» / Сост.:Б.И. Калмин, М.С. Корытов. – Омск:Изд-во СибАДИ,2012.– 16с.
Приводятся условные графические изображения типовых элементов кинематических схем станков. Дается понятие об уравнении кинематического баланса цепи, пример анализа кинематической цепи горизонтальнофрезерного станка модели 6М80Г. Приводятся фрагменты кинематических схем некоторых металлорежущих станков для самостоятельного выполнения индивидуальных заданий.
Табл. 2. Ил. 1. Библиогр.: 3 назв.
______________________________________________________
Подписано к печати |
2012. Формат 60 х 90 1/16. |
||
Бумага писчая. Гарнитура Таймс. |
|
||
Оперативный |
способ печати. Усл. п. л. 1,0 уч.-изд. л. 1,0. |
||
Тираж 50 экз. |
Изд. № |
. Заказ |
Цена договорная. |
* * *
Отпечатано в ПЦ издательства СибАДИ 644099, Омск, ул. П.Некрасова, 10
Составители:Б.И. Калмин, М. С. Корытов, 2012
3
Цель работы – практическое ознакомление с механизмами, кинематическими схемами и методикой составления уравнения кинематического баланса металлорежущих станков.
КИНЕМАТИЧЕСКАЯ СХЕМА СТАНКА
Передача движений от электродвигателя к рабочим органам станка осуществляется при помощи ряда механизмов: зубчатых, ременных, червячных, винтовых, реечных и др. Условное изображение этих механизмов, соединенных в определенной последовательности в кинематические цепи, называется кинематической схемой [1, 2, 3]. Каждая кинематическая цепь – это система последовательно соединенных элементарных механизмов, обеспечивающих исполнительные движения рабочих органов станка (вращение шпинделя, поступательное перемещение стола станка и т. д.).
На схемах указывают численные значения диаметров шкивов, чисел зубьев зубчатых колес, их модулей зацепления и т. д.
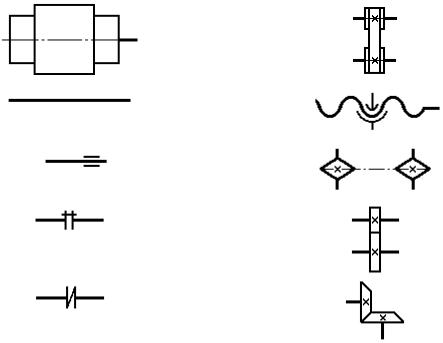
ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ДЛЯ КИНЕМАТИЧЕСКИХ СХЕМ
Т а б л и ц а |
1 |
|
|
|
|
|
|
|
|
Элемент |
|
Условное |
Элемент |
Условное |
схемы |
|
обозначение |
схемы |
обозначение |
Электродвигатель |
|
Ременная |
|
|
|
|
|
передача |
|
|
|
|
(открытая плоским |
|
|
|
|
ремнем) |
|
|
|
|
|
|
Вал |
|
|
Винтовая |
|
|
|
|
передача |
|
|
|
|
(разъемная гайка) |
|
Радиальный |
|
Цепная |
|
|
подшипник (без |
|
передача |
|
|
уточнения типа) |
|
|
|
|
Соединение двух |
|
Зубчатая передача |
|
|
валов глухое |
|
цилиндрическая |
|
|
|
|
|
|
|
Соединение двух |
|
Зубчатая передача |
|
|
валов эластичное |
|
коническая |
|
|
|
|
|
|
|
4
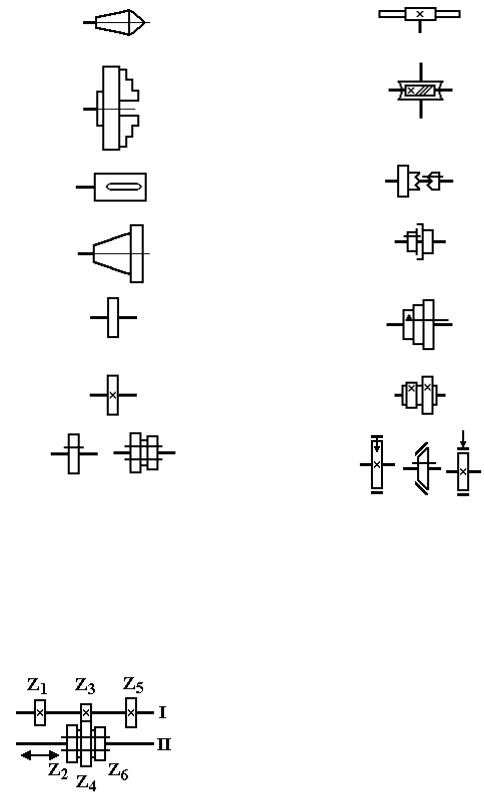
Окончание т а б л . |
1 |
|
|
|
|
|
|
Элемент |
Условное |
Элемент |
Условное |
схемы |
обозначение |
схемы |
обозначение |
Конец шпинделя |
|
Реечная |
|
для центровых |
|
передача |
|
работ |
|
|
|
Конец шпинделя |
|
Червячная |
|
для патронных |
|
передача |
|
работ |
|
|
|
|
|
|
|
Конец шпинделя |
|
Кулачковая муфта |
|
для сверлильных |
|
сцепления |
|
работ |
|
|
|
Конец шпинделя |
|
Фрикционная |
|
для фрезерных |
|
дисковая муфта |
|
работ |
|
сцепления |
|
|
|
|
|
Свободное |
|
Соединение деталей |
|
для вращения |
|
с валом при помо- |
|
соединение детали |
|
щи |
|
с валом |
|
вытяжной шпонки |
|
Глухое, неподвиж- |
|
Глухое соединение |
|
ное соединение |
|
двух деталей |
|
детали с валом |
|
на втулке |
|
Подвижное в осе- |
|
Тормозной |
|
вом направлении |
|
механизм |
|
без вращения со- |
|
|
|
единение детали с |
|
|
|
валом |
|
|
|
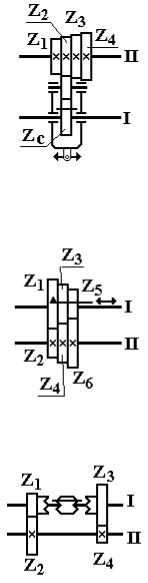
СХЕМЫ РЯДА ТИПОВЫХ МЕХАНИЗМОВ ДЛЯ СТУПЕНЧАТОГО ИЗМЕНЕНИЯ ЧАСТОТ ВРАЩЕНИЯ
Т а б л и ц а |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Механизм |
Графическое |
Передаточное |
|
Примечания |
||||||
|
изображение |
отношение |
|
|
|
|||||
Скользящий |
|
|
Z1 |
|
|
Движение передается от |
||||
|
|
|
||||||||
блок зубча- |
|
|
|
|
|
|
|
вала I к валу II. Вал II |
||
|
|
Z2 |
|
|
||||||
тых колес |
|
|
|
|
имеет три значения час- |
|||||
|
|
i |
Z3 |
|
|
|
тоты |
вращения |
относи- |
|
|
|
|
|
|
тельно вала I. |
Тройной |
||||
|
|
Z4 |
||||||||
|
|
|
|
|
блок |
обеспечивает три |
||||
|
|
|
Z5 |
|
|
|
передачи с разными пе- |
|||
|
|
|
Z6 |
|
|
редаточными |
отноше- |
|||
|
|
|
|
|
|
|
|
ниями i |
|
|
5
Окончание т а б л . 2
Механизм |
Графическое |
Передаточное |
Примечания |
||||||||||||||
|
изображение |
отношение |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Конус зуб- |
|
|
|
ZC |
|
|
Ведомый вал II имеет |
||||||||||
|
|
|
|||||||||||||||
чатых колес |
|
|
|
|
|
|
|
|
|
|
|
|
|
четыре значения час- |
|||
|
|
|
Z1 |
|
|
||||||||||||
с накидной |
|
|
|
|
|
тоты вращения отно- |
|||||||||||
шестерней |
|
|
|
ZC |
|
|
|
сительно |
вала |
I, то |
|||||||
(конус Нор- |
|
i |
|
Z2 |
|
|
есть столько, сколько |
||||||||||
тона) |
|
|
|
|
зубчатых колес имеет |
||||||||||||
|
|
ZC |
|
|
|
||||||||||||
|
|
|
|
|
конус. Накидная шес- |
||||||||||||
|
|
|
|
Z3 |
|
|
терня свободно сидит |
||||||||||
|
|
|
|
ZC |
|
|
|
|
|
|
|
на |
промежуточном |
||||
|
|
|
|
|
|
|
|
|
|
|
валу. Зубчатое колесо |
||||||
|
|
|
|
Z4 |
|||||||||||||
|
|
|
|
|
|
ZC перемещается на |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
валу I на шпонке |
|||
|
|
|
|
|
|
|
|
|
|
||||||||
Конус зуб- |
|
|
|
Z1 |
|
|
|
Зубчатые колеса Z1, |
|||||||||
|
|
|
|
||||||||||||||
чатых колес |
|
|
|
|
|
|
|
|
|
|
|
|
|
Z3 и Z5 на валу I сво- |
|||
|
|
|
Z2 |
|
|
|
|
|
|||||||||
с вытяжной |
|
|
|
|
|
|
бодны для вращения. |
||||||||||
шпонкой |
|
i |
|
Z3 |
|
|
|
|
|
|
|
|
Одно |
из |
них |
может |
|
|
|
|
|
|
|
|
|
быть соединено с ва- |
|||||||||
|
|
Z4 |
|||||||||||||||
|
|
|
|
|
|
|
лом |
I |
скользящей |
||||||||
|
|
|
|
Z5 |
|
|
|
|
шпонкой |
и участво- |
|||||||
|
|
|
|
Z6 |
|
|
|
вать в передаче дви- |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
жения. |
Остальные |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
шестерни |
вращаются |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вхолостую |
|
||
|
|
|
|
|
|
|
|
||||||||||
Двухступен- |
|
|
|
Z1 |
|
|
|
|
Ведомый вал II имеет |
||||||||
|
|
|
|
||||||||||||||
чатый меха- |
|
|
|
|
|
|
|
|
|
|
|
|
|
два значения частоты |
|||
|
|
|
Z2 |
|
|
|
|
|
|
||||||||
низм с двух- |
|
i |
|
|
|
вращения |
относи- |
||||||||||
сторонней |
|
Z3 |
|
|
тельно вала I. Звеном |
||||||||||||
кулачковой |
|
|
|
Z4 |
|
|
|
|
|
|
|
переключения |
явля- |
||||
муфтой |
|
|
|
|
|
ется |
двухсторонняя |
||||||||||
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
кулачковая |
муфта, |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
которая соединяет с |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
валом I шестерню Z1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
либо Z3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
УРАВНЕНИЕ КИНЕМАТИЧЕСКОГО БАЛАНСА
Уравнение, устанавливающее функциональную зависимость между величинами перемещений начального и конечного звеньев кинематической цепи, называется уравнением кинематического баланса.
6
Начальные звенья кинематической цепи в большинстве случаев имеют вращательное движение, конечные звенья получают как вращательное, так и прямолинейное движение.
Если начальное и конечное звенья оба вращаются, то уравнение кинематического баланса может быть представлено в следующем виде:
nн i = nк,
где nк – частота вращения конечного звена (шпинделя), об/мин; nн – частота вращения начального звена (вала электродвигателя), об/мин; i – передаточное отношение кинематической цепи.
i = i1 i2 i3 ... in,
где i1, i2, i3, ..., in – передаточные отношения отдельных кинематических пар цепи.
Если начальное звено имеет вращательное движение, а конечное – прямолинейное (движение подачи), то при минутной подаче Sм уравнение кинематического баланса имеет вид
nн i H = Sм,
где H – ход кинематической пары, преобразующей вращательное движение в прямолинейное.
Для винтовой пары
H = k tв,
где tв – шаг ходового винта, мм; k – число его заходов. Для реечной пары
H = m z,
где m – модуль зацепления, мм; z – число зубьев реечного колеса.
Когда подача конечного звена Sо задается в миллиметрах на один оборот начального звена, уравнение кинематического баланса имеет вид
1об i H = Sо.
ПРИМЕР АНАЛИЗА КИНЕМАТИЧЕСКОЙ СХЕМЫ ГОРИЗОНТАЛЬНО-ФРЕЗЕРНОГО СТАНКА МОДЕЛИ 6М80Г
Кинематическая схема станка приведена на рисунке.
1. Цепь главного движения (вращения шпинделя).
Уравнение кинематического баланса цепи в общем виде:
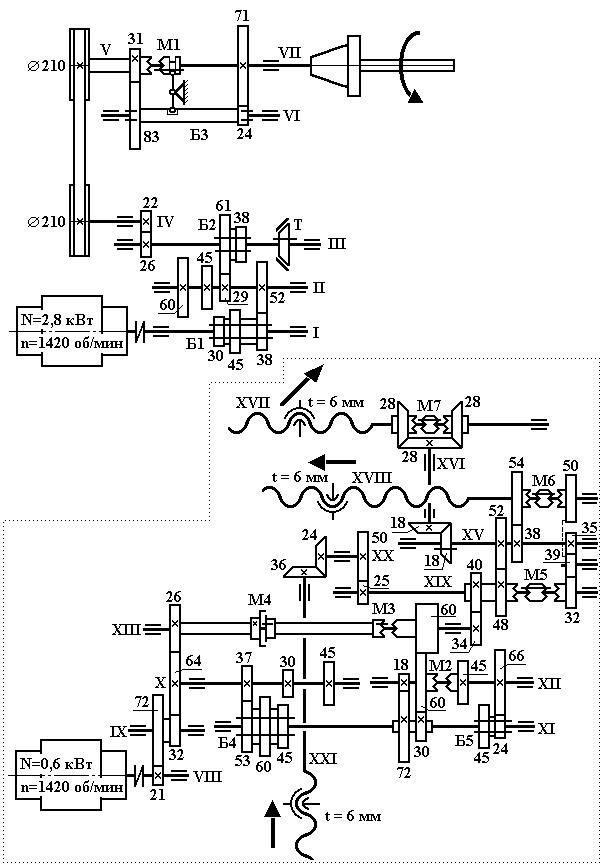
7
Кинематическая схема горизонтально-фрезерного станка модели 6М80Г (в пунктирный контур заключена цепь движения подач)
8
nшп = nэ . i,
где nшп – частота вращения шпинделя, об/мин; nэ – частота вращения вала электродвигателя, об/мин.
Уравнение кинематического баланса цепи в развернутом виде:
|
|
38 |
|
|
|
|
|
|
|
|
|
|
|
|
31 |
|
24 |
|
|
|
52 |
|
|
|
29 |
|
|
|
|
|
|
83 |
71 |
||||
nшп 1420 |
|
45 |
|
|
|
61 |
|
26 |
|
210 |
0985, |
|
|
|
||||
45 |
52 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
22 |
210 |
|
|
|
|
|
|
|||||
|
|
30 |
|
|
|
|
38 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
Количество скоростей вращения шпинделя
Z = 3 2 2 = 12.
Максимальное и минимальное числа оборотов шпинделя:
nmax |
1420 |
45 |
|
52 |
|
|
26 |
|
|
210 |
0985, 2260 об/мин; |
||||||||||
|
|
|
|
22 |
210 |
||||||||||||||||
|
45 |
38 |
|
|
|
|
|
|
|
||||||||||||
nmin |
1420 |
30 |
|
|
29 |
|
|
26 |
|
210 |
0985, |
31 |
|
24 |
50 об/мин. |
||||||
|
|
22 |
210 |
|
|
||||||||||||||||
|
60 |
|
61 |
|
|
|
|
|
83 |
71 |
|||||||||||
2. Цепь движения подач.
Уравнение кинематического баланса цепи в общем виде:
Sм = nэ i t,
где Sм – минутная подача стола станка, мм/мин; nэ – частота вращения вала электродвигателя привода подач, об/мин.
Уравнение кинематического баланса цепи в развернутом виде:
|
|
|
|
|
|
|
|
64 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
26 |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Sм |
1420 |
21 |
|
32 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
37 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
72 |
64 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
53 |
|
|
45 |
|
|
|
|
|
|
60 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
60 |
|
|||||||||||||||
|
|
|
|
|
|
|
30 |
|
|
45 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
60 |
|
|
24 |
|
|
|
|
|
|
18 |
|
|
|
|
30 |
|
60 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
45 |
|
|
66 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
72 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
60 |
60 |
|
|
||||||||||||
|
|
|
|
|
|
|
45 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вертикальная |
|
|
34 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
подача |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
35 |
39 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
25 |
24 |
|
|||||||||||||
|
|
|
М5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 мм |
||
40 |
39 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
50 |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
32 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
56 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
Реверс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
38 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
54 |
|
|
|
|
|
|
|
|
|
|
|
|
Поперечная |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
подача |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
48 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
35 |
|
|
39 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
М6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 мм |
|||||||||||||||||||
|
|
|
|
|
52 |
|
|
|
|
|
|
39 |
50 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Реверс |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
28 |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
28 |
|
|
|
|
Продольная |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
подача |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
28 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
7 |
|
|
|
|
|
|
|
|
|
6 мм |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
28 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Реверс |
|||||
Количество возможных подач
Z = 3 2 2 = 12.
Максимальное и минимальное значения подач:
Smax 1420 21 32 64 34 48 18 28 6 2400 мм/мин (быстрое пе72 64 26 40 52 18 28
ремещение);
Smin |
1420 |
21 |
|
32 |
|
30 |
|
24 |
|
18 |
|
30 |
|
60 |
|
34 |
|
25 |
|
24 |
6 9,41 мм/мин |
|
|
|
66 |
|
|
|
|
50 |
36 |
||||||||||||
|
72 |
64 |
60 |
|
72 |
60 |
60 |
40 |
|
|
|
||||||||||
(вертикальная подача).
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1.Изучить графические условные обозначения на кинематических схемах по табл.1.
2.Изучить способы соединения детали с валом по табл.1.
3.Изучить винтовой и реечный механизмы для преобразования вращательного движения в прямолинейно-поступательное движение.
4.Изучить типовые механизмы для ступенчатого изменения частоты вращения валов по табл. 2.
5.Закрепить понятие об уравнении кинематического баланса.
6.Провести анализ кинематической схемы станка из приложения по указанию преподавателя, включающий написание уравнений кинематического баланса в общем и развернутом видах для цепи главного движения и