

4 Розрахунок тягово-динамічних характеристик автомобіля
4.1 Показники динамічності при рівномірному русі.
При рівномірному русі автомобіля визначаємо наступні показниками його тягової динамічності:
максимальну швидкість Vmax руху при заданих дорожніх умовах;
значення коефіцієнтів опору дороги ψmax при русі автомобіля на нижчій передачі;
ψv – на вищій передачі, а також відповідні їм величини динамічного фактора Dmax і Dv.
При вказаних розрахунках використовуємо методи силового балансу і побудови динамічної характеристики, які в своїй основі є графо-аналітичними методами.
4.1.2 Метод динамічної характеристики
Динамічна характеристика будується на основі тягової характеристики автомобіля. Вона є графіком залежності динамічного фактора D від швидкості руху автомобіля V на всіх передачах.
Величину динамічного фактора визначаємо за формулою:
 (4.1)
(4.1)
де Ра = РТ – Рw – залишкова (вільна) сила тяги, котра може бути використана на подолання сил опору дороги та розгону автомобіля.
Беручи до уваги рівняння тягового балансу автомобіля і припускаючи cosα =1,а sinα =0 , вираз для динамічного фактору можна записати так:
D=
φ∙cosα
± sinα
± (δ
/g)∙ ,
або D
= ψ ± (δ
/g)∙
.
(4.2)
,
або D
= ψ ± (δ
/g)∙
.
(4.2)
При усталеному русі автомобіля D = ψ.
 Для
побудови динамічної характеристики
автомобіля, використовуючи дані таблиці
3.2, складаємо таблицю 4.1.
Для
побудови динамічної характеристики
автомобіля, використовуючи дані таблиці
3.2, складаємо таблицю 4.1.
Таблиця 4.1 – Показники для побудови динамічної характеристики автомобіля
Пере- дача |
Дані |
n, об/хв |
|||||||
850 |
1700 |
2550 |
3400 |
4250 |
5100 |
5500 |
5600 |
||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
1 |
V,м/с |
2,5 |
5,0 |
7,5 |
10,0 |
12,5 |
15,0 |
16,2 |
16,5 |
Ра, Н |
4178,0 |
4457,1 |
4576,9 |
4497,3 |
4241,7 |
3783,5 |
3529,5 |
3454,1 |
|
D |
0,292 |
0,311 |
0,32 |
0,314 |
0,296 |
0,264 |
0,246 |
0,241 |
|
2 |
V,м/с |
3,2 |
6,3 |
9,5 |
12,6 |
15,8 |
19,0 |
20,4 |
20,8 |
Ра, Н |
3313,0 |
3521,6 |
3605,0 |
3521,4 |
3290,2 |
2888,3 |
2674,7 |
2609,7 |
|
D |
0,231 |
0,246 |
0,252 |
0,246 |
0,23 |
0,201 |
0,187 |
0,182 |
|
3 |
V,м/с |
4,0 |
8,0 |
11,9 |
15,9 |
19,9 |
23,9 |
25,8 |
26,2 |
Ра, Н |
2621,1 |
2774,8 |
2814,7 |
2713,6 |
2487,0 |
2118,3 |
1915,3 |
1858,9 |
|
D |
0,183 |
0,194 |
0,197 |
0,19 |
0,174 |
0,148 |
0,134 |
0,13 |
|
4 |
V,м/с |
5,0 |
10,0 |
15,0 |
20,0 |
25,0 |
30,1 |
32,4 |
33,0 |
Ра, Н |
2077,6 |
2177,3 |
2170,5 |
2037,3 |
1789,3 |
1409,6 |
1206,1 |
1147,5 |
|
D |
0,145 |
0,152 |
0,152 |
0,142 |
0,125 |
0,098 |
0,084 |
0,08 |
|
5 |
V,м/с |
6,3 |
12,6 |
19,0 |
25,3 |
31,6 |
37,9 |
40,9 |
41,6 |
Ра, Н |
1633,5 |
1676,1 |
1607,7 |
1416,4 |
1110,1 |
678,0 |
442,2 |
379,5 |
|
D |
0,114 |
0,117 |
0,112 |
0,099 |
0,078 |
0,047 |
0,031 |
0,027 |
|
Значення швидкості V і вільної сили Ра на ведучих колесах і на різних передачах КП переносимо з таблиці 3.2.
 Щоб
не перераховувати при кожній зміні
навантаження величину динамічного
фактора, динамічну характеристику
доповнюємо номограмою завантажень. З
цією метою вісь абсцис динамічної
характеристики продовжуємо вліво і
наносимо на ній шкалу навантажень Н %.
З нульової точки шкали завантажень
будуємо вісь ординат і наносимо на ній
шкалу динамічного фактора D0
для не завантаженого автомобіля.
Величину масштабу «а0»
в мм для шкали «D0»
знаходимо із співвідношення:
Щоб
не перераховувати при кожній зміні
навантаження величину динамічного
фактора, динамічну характеристику
доповнюємо номограмою завантажень. З
цією метою вісь абсцис динамічної
характеристики продовжуємо вліво і
наносимо на ній шкалу навантажень Н %.
З нульової точки шкали завантажень
будуємо вісь ординат і наносимо на ній
шкалу динамічного фактора D0
для не завантаженого автомобіля.
Величину масштабу «а0»
в мм для шкали «D0»
знаходимо із співвідношення:
 ,
мм, (4.3)
,
мм, (4.3)
де а - масштаб шкали динамічного фактора D для повністю завантаженого автомобіля, мм.
Рівнозначні ділення шкал D і Dо сполучаємо між собою прямими лініями і отримуємо номограму завантажень.
Щоб оцінити можливість роботи автомобіля без буксування ведучих коліс при різному завантаженні автомобіля, необхідно зіставити величини динамічних факторів за умовами тяги D і зчеплення Dφ. Таке зіставлення виконують за допомогою графіка контролю буксування, що характеризує величини динамічного фактора Dφ по зчепленню при різних значеннях навантаження і коефіцієнта зчеплення.
Значення динамічних факторів по зчепленню завантаженого Dφ, і не завантаженого автомобіля Dоφ при різних значеннях коефіцієнта зчеплення визначаємо за формулами:
 (4.4)
(4.4)
 .
(4.5)
.
(4.5)
і відкладаємо, відповідно, по осях D і D0 у тому ж масштабі.
Значення Dφ і D0φ, обчислені для однакових коефіцієнтів зчеплення φ сполучаємо між собою прямими пунктирними лініями. Над кожною пунктирною лінією вказуємо значення коефіцієнта зчеплення, як це показано на рисунку 4.1

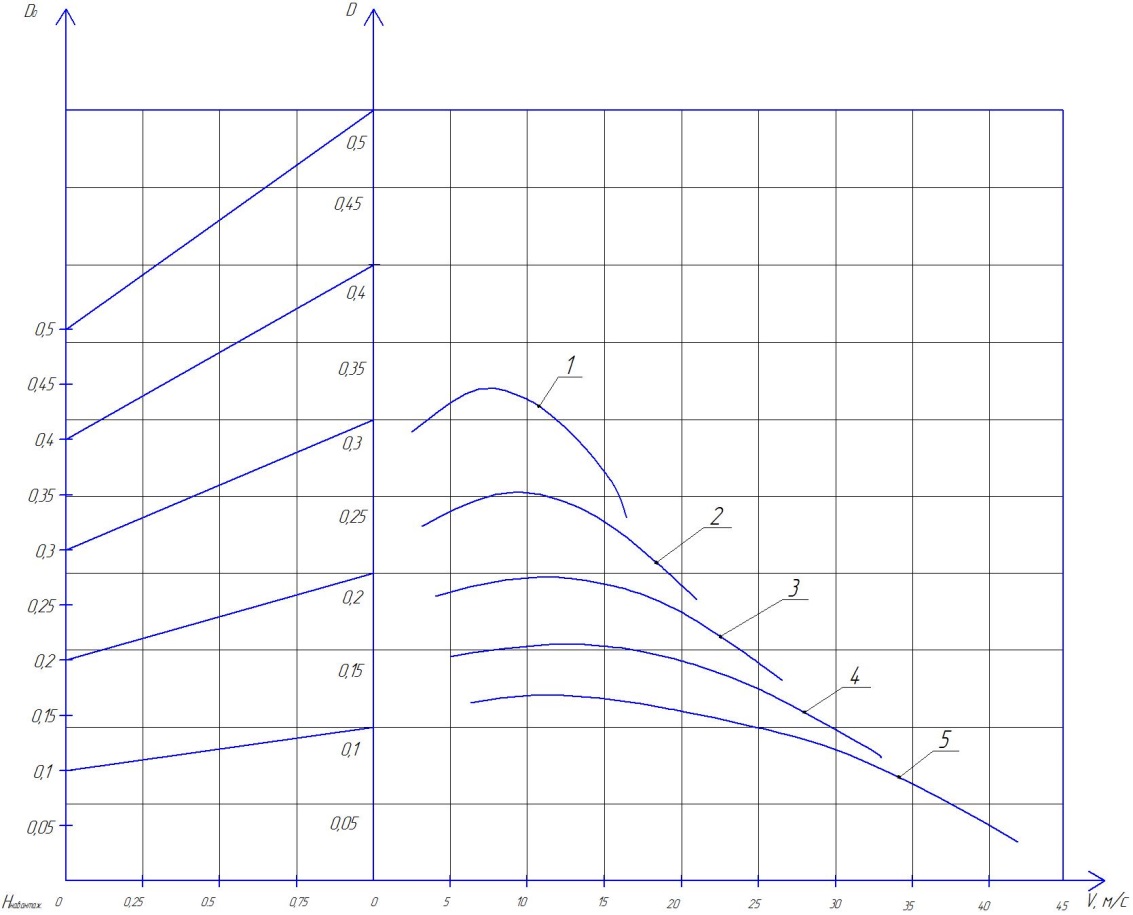
Рисунок 4.1 – Динамічна характеристика автомобіля