

Этот вариант прекращают использовать и переходят к развитому варианту.
2. Развитой дифференциальный вариант позволяет сохранить высокую точность определения места в радиусе R ~ 1000 миль от КП, практически не зависящую от удаления до КП (рис.7.2).
Рис.7.2. Схема построения развитого дифференциального варианта
На данном участке побережья (или суши) подбираются и устанавливаются по окружности несколько КП-передатчиков. В центре - главный КП. Все они объединены в сеть. Все производят измерения и определяют поправки. Эти поправки передаются на главный КП, на котором происходит их совместная обработка по сложной математической модели, затем их объединяют в стандартный формат
RTCM - SC-104 и передают в эфир R ~ 1000 миль.
В настоящее время развитой дифференциальный вариант имеет множество разновидностей, а именно - широкозонных, региональных и локальных дифференциальных систем.
7.2.Широкозонная дифференциальная система SBAS
Широкозонная система является геостационарным дополнением для навигационно-геодезических систем, таких как GPS. Подобные системы часто называют также широкозонными системами спутниковой дифференциальной навигации (SBAS Satellite based Аugmentation System), поскольку геостационарные спутники позволяют расширить зону, которую можно обеспечить дифференциальными поправками. Один геостационарный спутник может обеспечить поправками территорию равную по площади 1/3 поверхности земного шара [35,36]. На рис. 7.3. показаны элементы системы SBAS.
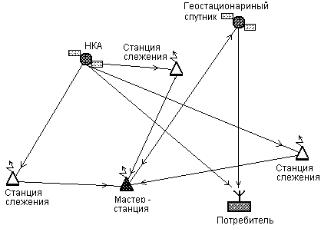
Рис.7.3. Элементы системы SBAS
Применение систем геостационарных спутников позволяет значительно повысить точность определения местоположения, а значит, возможность использования простых, компактных и относительно недорогих спутниковых приемников, позволяющих решать навигационные и геодезические задачи.
Широкозонные системы могут найти применение при решении задач морской и прикладной геодезии, точной навигации и т. д. В таких системах реализован метод формирования коррекций в виде поправок к эфемеридным данным и параметрам ионосферной модели и передаче такой информации всем пользователям через геостационарный спутник. При этом не требуется какого либо дополнительного оборудования к спутниковому приемнику (например, радиомодема). Задача решается с помощью обычной спутниковой антенны и спутникового приемника [35,36].
Подсистема SBAS состоит из следующих элементов (рис.7.3):
—сети наземных станций слежения. На этих станциях стоят двухчастотные геодезические приемники, которые осуществляют непрерывный сбор данных от всех навигационных спутников.
Измерения с этих станций передаются в мастер-станцию в режиме реального времени;
—мастер-станция, которая необходима для обработки данных со
станциями |
слежения |
и |
формирования |
коррекций; |
— станции закладки корректирующей информации на |
|
|||
геостационарные спутники (совмещена с мастер-станцией);
—геостационарные спутники для передачи поправок на большую территорию всем пользователям.
Подсистема выполняет следующие функции:
—сбор данных от всех навигационных спутников (НКА), находящихся в поле радиовидимости;
—составление карты вертикальных ионосферных задержек;
—контроль надежности навигационных спутников;
—определение и уточнение параметров орбит навигационных спутников;
—определение коррекций орбит и временных поправок для навигационных спутников;
—обеспечение потребителей корректирующей информацией и дополнительными измерениями псевдодальностей на частоте L1 (в системе GPS), позволяющими повысить надежность и точность спутниковых определений;
—обеспечение независимого контроля выходных данных предыдущих шести функций перед их использованием потребителями;
—обеспечение работоспособности и нормального функционирования подсистемы.
Таким образом, при использовании сигналов от геостационарных систем улучшается точность за счет использования:
—уточненных данных об эфемеридах навигационных спутников;
—уточненной модели ионосферы;
—дополнительного GPS сигнала на частоте L1 = 1575,42 МГц (или дополнительных сигналов, в случае, если приемник отслеживает несколько геостационарных спутников) от геостационарных спутников системы.
Для уменьшения ошибок, вызванных неточностью эфемерид, в GPS предусмотрено обновление эфемеридной информации для навигационных спутников каждый час.
Внастоящее время существует несколько подсистем SBAS:
1.WAAS (Wide Area Augmentation System) покрывает США;
2.EGNOS (European Geostationary Navigation Overlay Service)
покрывает Европу;
3.MSAS (Multi functional Satellite based Augmentation System)
покрывает Японию;
4.GAGAN (GPS and GEO (Geostationary Earth Orbit) Augmented Navigation) покрывает Индию.
С целью же получения более точной информации о положениях навигационных спутников, в подсистеме SBAS осуществляется трансляция коррекций эфемерид. При этом коррекция осуществляется не один раз в час (как в GPS), а один раз за несколько минут.
7.2.1. Широкозонная подсистема WAAS
Федеральное управление по Аэронавтике (FAA) и Министерство Транспорта США создали программу WAAS для высокоточной навигации в авиации. В настоящее время точность системы спутниковой навигации GPS не соответствует требованиям FAA в отношении точности, совместимости и доступности. Система WAAS исправляет погрешности системы GPS, возникающие из-за возмущений ионосферы, недостаточной неточности прогнозирования параметров орбит спутников, а также из-за различий в состоянии отдельных спутников системы GPS.
Наземный компонент системы WAAS включает до 25 опорных станций, расположенных на территории США, принимающих сигналы спутников GPS. На западном и восточном побережье США имеется по одной базовой станции, собирающей информацию от остальных станций системы, а также вырабатывающих поправочный сигнал. Такая поправка учитывает параметры орбиты спутников GPS, а также неравномерность прохождения сигнала сквозь ионосферу и атмосферу. Корректирующий сигнал посылается через один из двух геостационарных спутников, или через экваториальные спутники с точно определенными координатами. Такого рода сигналы полностью совместимы с основным кодом сигналов, доступных GPS-приемникам, т.е. любой GPS-навигатор с функцией WAAS может принимать такой поправочный сигнал.
Система WAAS может использоваться для гражданского применения, в том числе и для судов.
7.2.2. Широкозонная подсистема EGNOS
Европейский аналог WAAS называется EGNOS (European
Geostationary Navigation |
Overlay Services) [34]. |
|
||
Система EGNOS включает три геостационарных спутника, |
||||
принадлежащих |
двум |
компаниям |
Artemis и Inmarsat, каждая из |
|
которых имеет |
свою |
независимую |
сеть наземных |
станций. |
Программа |
EGNOS была |
запущена в 1993 |
году и |
|
направленная на улучшение работы |
систем GPS и ГЛОНАСС на |
|||