

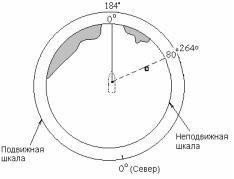
Третий вид ориентации изображения - «КУРС СТАБИЛИЗИРОВАННЫЙ» дает возможность стабилизации его относительно Севера и одновременной ориентации относительно курса.
При этом линия отметки курса будет вновь направлена только вверх (см. рис.1.10), а изображение будет оставаться неподвижным.
Рис.1.10. Пример радиолокационного изображения при ориентации
по «Курсу стабилизированному»
Линия отметки курса может смещаться при незначительных изменениях курса судна (в частности, при «рыскании»).
(В некоторых НРЛС ориентир «Север» отображается подвижным маркером).
1.2.2.Индикация относительного и истинного движения
Врассмотренных выше режимах индикации радиолокационного
изображения судно имеет фиксированное место на экране — центр начала развертки. При этом судно считается неподвижным.
При движении судна все отметки целей на экране будут совершать движение со скоростями, величина и направление которых будут определяться суммой скоростей движения судна и самих целей. Иначе говоря, это будут относительные движения отметок в судовой системе координат. Следовательно, все окружающие объекты, изображаемые на экране, имеют видимое перемещение относительно судна, т. е. все они
перемещаются с относительными скоростями по относительным направлениям в масштабе установленного изображения.
Такой режим называется режимом индикации относительного

движения (ОД). Режим ОД, как правило, осуществляется при ориентации изображения относительно курса либо Севера, а также может быть одновременно ориентирован по курсу и стабилизирован по Северу.
В современных радиолокаторах используется также режим индикации истинного движения (ИД). В данном режиме центр начала развертки, принимаемый за отметку своего судна, перемещается по экрану со скоростью в направлении, соответствующему истинному курсу и скорости своего судна в масштабе изображения,
стабилизированного относительно Севера. |
|
Все неподвижные объекты на экране |
должны быть |
неподвижными, а движущиеся цели – перемещаться своими истинными курсами и скоростями.
Для осуществления режима «Истинное движение» из относительного движения отметок целей вычитается собственное движение судна-носителя НРЛС [7].
В НРЛС операция вычитания выполняется смещением центра изображения, который является отметкой своего судна, в направлении и со скоростью, которые вводятся в систему от лага и гирокомпаса.
Пределы перемещения изображения своего судна на экране ограничиваются необходимостью - иметь возможность обнаруживать цели по корме и по носу при приближении своей отметки к краю экрана.
Наглядное представление о работе РЛС в режиме ИД дает рис.1.11, на котором приведены снимки изображения входа в канал (рис.1.11,а) и выход из него (рис.1.11,г). Ограждение входа в канал остается неподвижным на экране, и видно, что отметка вблизи судна с НРЛС является отметкой другого судна, постепенно отстающего от первого.
а) |
б) |
в) |
г) |
Рис.1.11.Фазы движения судна в режиме истинного движения
В НРЛС, при первоначальном включении режима ИД и при последующих переориентациях, отметка своего судна смещается в
сторону, противоположную последнему курсу, на расстояние, соответствующее 2/3 радиуса экрана (см. рис.1.11,а). Переориентация изображения на ИКО (режим «Возврат» - то есть отметка своего судна смещается по контркурсу на расстояние, соответствующее 2/3 радиуса экрана) производится автоматически (рис.1.11,г), если отметка своего судна приблизилась к краю экрана на 1/3 его радиуса (рис.1.11,в). Кроме того, возврат может быть выполнен оператором в любой момент вручную, нажатием соответствующей кнопки.
Следует обратить внимание на рис.1.11,г. На нем, в отличие от первых трех – новое радиолокационное изображение.
Основным достоинством данного режима является то, что все неподвижные объекты, окружающие судно, воспроизводятся на экране как неподвижные, а отметки от подвижных объектов будут перемещаться по экрану не с относительными скоростями, как в режиме ОД, а с истинными и по истинным направлениям, соответствующим масштабу индицируемого изображения.
Для выполнения этого режима в НРЛС должен быть блок истинного движения, в который поступают данные из гирокомпаса и лага.
Как правило, этот режим осуществляется на шкалах до 8 миль включительно.
(Если в режиме ИД происходит смещение неподвижных объектов, то это указывает на то, что гирокомпас и/или лаг выдают неточные данные. Введя в блок ИД корректирующие данные на указанные приборы и добившись неподвижности неподвижных объектов, можно определить погрешность этих приборов).
Недостатки относительного радиолокационного изображения при плавании вдоль побережий и в узкостях, а именно размазывание изображений неподвижных объектов и трудность их выделения среди подвижных, начинают ощущаться только после работы в режиме ИД. На рис.1.12 представлены возможные виды ориентации и индикации движения.