

нелинейный элемент (диод); сопротивление нагрузки; фильтр (емкость нагрузки).
При воздействии на нелинейный элемент радиоимпульса ПЧ на сопротивлении нагрузки выделяется положительный видеоимпульс с пульсациями, которые сглаживаются фильтром, находящимся между детектором и видеоусилителем. Получаемый видеоимпульс является основой получаемой в РЛС полезной информации.
Видеоусилители применяются в РЛС для усиления сигналов, поступающих с выхода детектора приемника, до уровня, обеспечивающего нормальную работу оконечных устройств РЛС, в частности электронно-лучевых индикаторов. Для того чтобы при воспроизведении сигналов терялось как можно меньше полезной информации, необходимо, чтобы в видеоусилителе обеспечивалось равномерное усиление во всей полосе частот, соответствующей видеоимпульсу.
6.3. Автоматическая подстройка частоты
При отклонении промежуточной частоты от своего номинального значения резко понижается усиление приемника и уменьшается дальность действия РЛС. Отклонения ПЧ от номинала вызываются нестабильностью частоты генератора СВЧ (магнетрона) передатчика и гетеродина приемника. Эта нестабильность обусловлена изменением питающих напряжений, параметров резонансных систем, нагрузки магнетрона из-за асимметрии вращающихся соединений волноводного тракта антенны, изменении температурных режимов и других дестабилизирующих факторов.
Для поддержания постоянной ПЧ необходимо поддерживать постоянной разность частот гетеродина и передатчика. Обычно этого добиваются путем подстройки гетеродина. Подстройка частоты осуществляется автоматически с помощью блока автоматической подстройки частоты (АПЧ). Часто предусматривается и ручная регулировка частоты (РРЧ), но действие ее замедленно, поэтому она используется как резервная.
Наибольшее распространение в навигационных РЛС получила двухканальная схема АПЧ. В этой схеме (см. рис. 6.1) для подстройки частоты используется небольшая часть мощности зондирующих импульсов, подаваемая непосредственно от магнетронного генератора через делитель мощности – аттенюатор. Эта схема имеет отдельный смеситель и УПЧ для канала АПЧ.
В результате преобразования на выходе смесителя АПЧ возникают колебания разностной частоты. Если частота магнетрона или гетеродина отклонится от номинала, то разностные частоты на входе блока АПЧ и на входе УПЧ приемника будут отличаться от номинального значения ПЧ. При этом на выходе блока АПЧ появляется напряжение Uупр., которое будет увеличивать или уменьшать напряжение на управляющем элементе гетеродина (отражателе клистрона или варикапе – при использовании диода Ганна) в зависимости от того, в какую сторону отклонилась разностная частота. Это изменение напряжения вызывает изменение частоты гетеродина таким образом, чтобы уменьшилось отклонение разностной частоты от значения ПЧ, то есть от резонансной частоты УПЧ.
Блок АПЧ, кроме смесителя АПЧ и УПЧ, содержит частотный дискриминатор и управляющее устройство. Частотный дискриминатор служит для получения напряжения рассогласования с полярностью, зависящей от знака расстройки и величины, пропорциональной величине расстройки,
f = fпр − fпр.н. ,
где fпр.н. — номинальное значение промежуточной частоты
приемника.
В качестве дискриминаторов или частотных различителей применяют частотные детекторы.
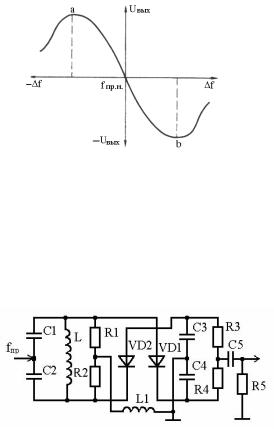
Зависимость выходного напряжения Uвых дискриминатора от расстройки f, называемая статической характеристикой дискриминатора Uвых=f ( f), показана на рис.6.6.
На участке а, b, который является рабочим, характеристику принято считать прямолинейной. При больших отклонениях частоты от номинального значения характеристика искривляется и имеет падающие участки. Это происходит из-за уменьшения напряжения на контурах вследствие значительного ухода частоты от резонансной.
В приемниках судовых РЛС |
применяют двухтактные |
дискриминаторы с настроенными контурами на полупроводниковых диодах и схемы с расстроенными контурами.
Рис.6.6. Статическая характеристика дискриминатора
Принципиальная схема дискриминатора с расстроенными контурами показана на рис.6.7. Конденсаторы С1 и С2 совместно с общей индуктивностью L образуют два последовательных контура LC1 и LC2, настроенных соответственно на частоту
f1 = fпр.н. − f и f2 = fпр.н. + f .
Рис.6.7. Принципиальная схема дискриминатора с расстроенными контурами
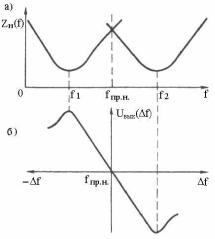
Если частота колебаний, поступающих на вход дискриминатора с УПЧ, равна номинальному значению fпр.н, то сопротивление ZH обоих контуров одинаково (рис.6.8,а). На диоды VD1 и VD2 действует одинаковое по величине напряжение, и напряжение, снимаемое с резистора R5, равно нулю.
Когда частота колебаний на входе дискриминатора понижается и оказывается равной f1 сопротивление последовательного контура C1L (см. рис. 6.7) будет минимально, а сопротивление контура C2L оказывается большим. На зажимах диода VD1 напряжение будет
увеличиваться, и проходящий через него ток будет заряжать конденсатор С4. После окончания импульса конденсатор С4 разряжается через R4, С5 и R5. На резисторе R5 возникает напряжение положительной полярности, снимаемое на управляющую схему.
Рис.6.8. Амплитудно-частотная характеристика частотного дискриминатора
При повышении разностной частоты до значения f2 сопротивление контура C2L становится минимальным, а контура C1L увеличивается. В этом случае проходящий через диод VD2 ток будет заряжать конденсатор СЗ. Последний, разряжаясь через R5, C5 и R3, создает на резисторе R5 напряжение отрицательной полярности.
Таким образом, в зависимости от знака и значения отклонения разностной частоты гетеродина и сигнала (магнетрона), напряжение на выходе дискриминатора будет изменяться согласно характеристике, показанной на рис.6.8,б.
Управляющее устройство изменяет частоту гетеродина в зависимости от напряжения рассогласования, вырабатываемого дискриминатором.
Если в качестве гетеродина используется отражательный клистрон, то управляющее устройство АПЧ должно обеспечить изменение напряжения Uупр. на управляющем элементе гетеродина в зависимости от значения и знака отклонения промежуточной частоты от номинального значения так, чтобы она приближалась к номинальной, а напряжение рассогласования стремилось к нулю.