

6 - Die Ressourcen
6.6.8Konfiguration von CAN Modulen...
CoDeSys unterstützt eine Hardwarekonfiguration gemäß CANopen Draft Standard 301. Voraussetzung ist eine Konfigurationsdatei, die das Einfügen von CAN-Modulen zulässt.
Die im definierten Verzeichnis für die Konfigurationsdateien abgelegten EDS- (Electronic Data Sheet) bzw. DCF-Dateien (Device Configuration File) stehen zur Verwendung in der Konfiguration in dem Rahmen zur Verfügung wie dies in der Konfigurationsdatei definiert ist. In einer EDS-Datei sind die Einstellungsmöglichkeiten eines CAN-Moduls beschrieben. Wird ein Modul eingefügt, das in einer DCF-Datei beschrieben ist, können nur die IEC-Adressen verändert werden, da dieses Modul bereits in einem CAN-Konfigurator komplett konfiguriert wurde.
Die CAN Module erhalten eine Konfiguration, die Ihr zeitliches und fehlerbezogenes Verhalten im Nachrichtenaustausch beschreibt (Dialog 'CAN Parameter eines CAN Moduls'). Zudem wird für jedes Modul das Mapping der PDOs (Process Data Objects) festgelegt, die zum Senden und Empfangen dienen (Dialoge 'PDO-Mapping Empfangen' bzw. '..Senden'). Die Werte der zur Verfügung stehenden SDOs (Service Data Objects) können angepaßt werden (Dialog 'Service Data Objects').
Zusätzliche in der Gerätedatei angegebene Parameter eines CAN Moduls bzw. CAN Masters können im Dialog 'Modulparameter' konfiguriert werden.
Um eine CoDeSys-programmierbare Steuerung in einem CAN-Netzwerk als CANopen-Slave (auch CANopen-Node genannt, im Folgenden als CAN Device bezeichnet) einbinden zu können, kann sie im CoDeSys Steuerungskonfigurator konfiguriert und die Konfiguration als EDS-Datei gespeichert werden. Diese EDS-Datei kann dann in einer beliebigen CANopen-Masterkonfiguration verwendet werden.
Basis Parameter eines CAN-Masters
Der Basisparameter-Dialog eines CAN-Masters entspricht dem der anderen Module (siehe Kapitel 6.6.5, Basisparameter eines I/O-Moduls).
CAN Parameter eines CAN-Masters
CAN Parameter Dialog für einen CAN-Master
Hier werden die globalen Einstellungen und Überwachungsparameter für den CAN Bus definiert:
Stellen Sie über die Auswahl die gewünschte Baudrate ein, die für die Übertragung im Bus gelten soll.
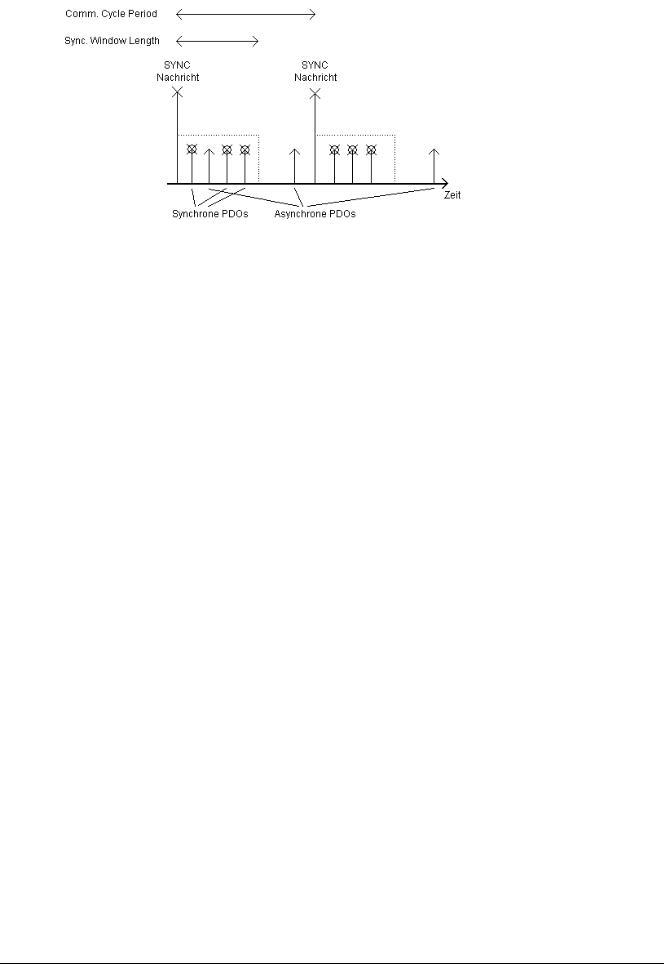
Man unterscheidet bei den PDO's (Process Data Object) synchrone und asynchrone Übertragungsmodi (siehe PDO Eigenschaften). Die Communication Cycle Period [µsec] ist das Zeitintervall in Mikrosekunden, in dem die Synchronisationsnachricht mit einer eindeutigen Nummer Sync.COB-Id (Communication Object Identifier) verschickt wird.
aktivieren: Nur wenn diese Option angewählt ist, erfolgt ein Versenden von Synchronisationsnachrichten zwischen Master und Slaves.
CoDeSys V2.3 |
6-37 |
Steuerungskonfiguration
Die synchronen PDO's werden direkt nach der Synchronisationsnachricht in dem in Sync.Window Length [µsec] angegebenen Zeitfenster übertragen. Sind die Felder Comm. Cycle Period und Sync. Window Length mit 0 belegt, so werden keine Synchronisationsnachrichten verschickt.
NodeID: eine eindeutige Kennung des CAN-Modul, entspricht der am Modul selbst eingestellten Nummer zwischen 1 und 127. Die ID muss dezimal eingegeben werden. (Nicht zu verwechseln mit der 'Knotennummer', die außerdem in der Steuerungskonfiguration verwendet wird !)
Ist die Option Automatisch starten aktiviert, so wird beim Download und beim Hochfahren der Steuerung der CAN-Bus automatisch initialisiert und gestartet. Ohne diese Option muss der CAN-Bus im Projekt gestartet werden.
Ist die Option DSP301,V3.01 und DSP306 unterstützen aktiviert, werden modulare CAN Slaves sowie einige zusätzliche Erweiterungen bezüglich der Normen DSP301 V3.01 und DSP306 unterstützt. In diesem Fall ist beispielsweise auch der Takt für die Überwachungsfunktion Heartbeat einstellbar (Heartbeat Master [ms]:), die alternativ zur Nodeguarding-Funktion verwendet werden kann. Im Gegensatz zu dieser können Heartbeats von allen CAN-Modulen unabhängig voneinander versendet werden. Üblicherweise wird so konfiguriert, dass der Master Heartbeats an die Slaves verschickt.
Modulparameter eines CAN-Masters
Der Modulparameter-Dialog eines CAN-Masters entspricht dem der anderen Module: Die Parameter, die dem Master zusätzlich zu den CAN Parametern in der Konfigurationsdatei vergeben wurden, werden hier dargestellt und die Werte können im Standardfall editiert werden.
Basisparameter eines CAN-Moduls
Der Basisparameter-Dialog eines CAN-Moduls entspricht dem der anderen Module (siehe Kapitel 6.6.5, Basisparameter eines I/O-Moduls).
Bei Ausgabe- und Eingabeadresse werden für eine CAN Konfiguration die IEC-Adressen eingegeben, mit denen die PDO's (Process Data Object) im Projekt angesprochen werden können, wobei die Richtung (Eingabe oder Ausgabe) aus Sicht des Moduls festgelegt ist.
CAN Parameter eines CAN-Moduls
Die CAN Parameter eines CAN-Moduls, das nicht als 'Master' die globale Überwachungsfunktion im Bus übernimmt, unterscheiden sich von denen eines CAN-Masters.
Sektion Allgemein:
Die Node ID dient zur eindeutigen Identifizierung des CAN-Moduls und entspricht der am Modul selbst eingestellten Nummer zwischen 1 und 127. Die ID muss dezimal eingegeben werden.
Ist DCF schreiben aktiviert, wird nach dem Einfügen einer EDS-Datei im eingestellten Verzeichnis für Übersetzungsdateien eine DCF-Datei erstellt, deren Namen sich zusammensetzt aus dem Namen der EDS-Datei und der angehängten Node-Id.
6-38 |
CoDeSys V2.3 |

6 - Die Ressourcen
Ist die Option Alle SDO's erzeugen aktiviert, werden für alle Objekte SDO's erzeugt und nicht nur für die geänderten.
Ist die Option Knoten zurücksetzen aktiviert, dann erhält der Slave einen Reset, sobald die Konfiguration zur Steuerung geladen wird.
CAN Parameter-Dialog für ein CAN-Modul
Sektion Nodeguard: (Alternative zu Heartbeat-Funktion)
Ist die Option Nodeguarding aktiviert, so wird im Intervall, das bei Guard Time in Millisekunden angegeben ist, eine Nachricht an das Modul verschickt. Meldet sich das Modul daraufhin nicht mit der angegebenen Guard COB-ID (Communication Object Identifier), so erhält es den Status Timeout. Ist die Anzahl der Versuche (Life Time Factor) erreicht, so gilt das Modul als nicht OK. Der Status des Moduls wird bei der Diagnoseadresse hinterlegt. Ist keine Guard Time und kein Life Time Factor angegeben (0), erfolgt keine Überwachung des Moduls.
Sektion Heartbeat Einstellungen: (Alternative zu Nodeguard-Funktion)
Ist die Option Heartbeat Erzeugung aktivieren aktiviert, sendet das Modul in den bei Heartbeat Producer Time: angegebenen ms-Abständen Hearbeats aus.
Ist die Option Heartbeat Verbrauch aktivieren aktiviert, hört das Modul auf Heartbeats, die vom Master gesendet werden. Sobald solche nicht mehr empfangen werden, schaltet das Modul die I/Os ab.
Sektion Emergency Telegram:
Ein Modul sendet bei internen Fehlern Emergency-Nachrichten mit einer eindeutigen COB-Id. Diese je nach Modul unterschiedlichen Nachrichten werden an der Diagnoseadresse hinterlegt.
Hinter der Info-Schaltfläche verbergen sich die Einträge „FileInfo" und „DeviceInfo" der EDSbzw. DCF-Datei des jeweiligen Modulherstellers.
CoDeSys V2.3 |
6-39 |

Steuerungskonfiguration
CAN Modulauswahl für modulare Slaves
In der linken Spalte finden Sie die für den modularen Slave Verfügbaren Module aufgelistet. Stellen Sie mit Hilfe der Schaltflächen Hinzufügen und Entfernen die gewünschte Auswahl zusammen, die dann in der rechten Spalte (Ausgewählte Module) sichtbar ist. Entsprechend wird die PDOund SDO-Auswahl verändert.
PDO-Mapping eines CAN-Moduls
Die Registerkarten PDO-Mapping Empfangen und PDO-Mapping Senden im Konfigurationsdialog eines CAN-Moduls ermöglichen, das in der EDS-Datei beschriebene „Mapping" des Moduls zu verändern.
Auf der linken Seite stehen alle „map-baren" Objekte der EDS-Datei zur Verfügung und können zu den PDO's (Process Data Object) der rechten Seite hinzugefügt (
>>-Schaltfläche) bzw. wieder entfernt (Entfernen-Schaltfläche) werden. Die StandardDataTypes können eingefügt werden, um im PDO leere Zwischenräume zu erzeugen.
Mit der Schaltfläche PDO Einfügen können Sie weitere PDO's erzeugen und mit entsprechenden Objekten belegen. Über die eingefügten PDO's erfolgt die Zuordnung der Einund Ausgänge zu den IEC-Adressen. In der Steuerungskonfiguration werden die vorgenommenen Einstellungen nach Verlassen des Dialoges sichtbar. Die einzelnen Objekte können dort mit symbolischen Namen belegt werden.
Dialog zum PDO-Mapping Senden
Über Eigenschaften lassen sich die in der Norm definierten Eigenschaften der PDO's in einem Dialog editieren:
6-40 |
CoDeSys V2.3 |
6 - Die Ressourcen
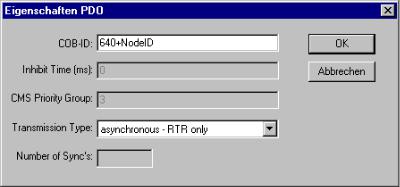
PDO-Eigenschaften-Dialog
Jede PDO-Nachricht benötigt eine eindeutige COB-ID (Communication Object Identifier).
Wird eine Option von dem Modul nicht unterstützt bzw. darf der Wert nicht verändert werden, so erscheint das Feld grau und kann nicht editiert werden.
Die Inhibit Time (100µs) ist die minimale Zeit zwischen zwei Nachrichten dieses PDOs. Damit PDOs, die bei Änderung des Wertes übertragen werden, nicht zu häufig versendet werden. Die Einheit ist 100 µs.
Die CMS Priority Group kann nicht verändert werden und beschreibt die relative Wichtigkeit des PDOs bei der CAN-Übertragung. Es werden die Werte von 0 bis 7 angezeigt, wobei 0 die höchste Priorität ist.
Bei Transmission Type erhalten Sie eine Auswahl von möglichen Übertragungmodi für dieses Modul:
acyclic – synchronous: das PDO wird zwar synchron übertragen, aber nicht periodisch.
cyclic – synchronous: das PDO wird synchron übertragen, wobei Number of Sync's die Anzahl der Synchronisationsnachrichten angibt, die zwischen zwei Übertragungen dieses PDO's liegen.
synchronous – RTR only: das PDO wird nach einer Synchronisationsnachricht aktualisiert, aber nicht versendet. Übertragen wird es nur auf eine explizite Anfrage (Remote Transmission Request)
asynchronous – RTR only: das PDO wird aktualisiert und übertragen nur auf eine explizite Anfrage (Remote Transmission Request)
asynchronous – device profile specific und asynchronous – manufacturer specific: das PDO wird nur nach bestimmten Ereignissen übertragen.
Number of Syncs: Abhängig vom Transmission Type ist dieses Feld editierbar zur Eingabe der Anzahl der Synchronisationsnachrichten (Definition in CAN Parameter Dialog, Com. Cycle Period, Sync Window Length, Sync. COB-Id), nach denen das PDO wieder versendet werden soll.
Event-Time: Abhängig vom Transmission Type wird hier die Zeitspanne in Millisekunden (ms) angegeben, die zwischen zwei Übertragungen des PDOs liegen soll.
Service Data Objects
Hier werden alle Objekte der EDSbzw. DCF-Datei aufgelistet, die im Bereich von Index 0x2000 bis 0x9FFF liegen und als beschreibbar definiert sind.
CoDeSys V2.3 |
6-41 |