

1. Как определяется перемещение в статически неопределимых стержневых системах?
Для того, чтобы найти перемещение в СНС, необходимо перемножить 2 эпюры:
1) Результирующую эпюру моментов в статически неопределимой системе;
2) Эпюру в статически определимой основной системе от силы = 1 в месте, где нужно найти перемещение
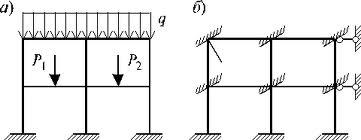
2. Кинематическая неопределимость рамы и её степень.
Степень кинематической неопределимости рамы определяется по формуле nк=nу+nл , где nу –число жестких неопорных узлов, nл -число неизвестных линейных смещений.
Общее число неизвестных угловых и линейных перемещений узлов стержневой системы п, определяет степень кинематической неопределимости стержневой системы.
3. Из чего складывается и как подсчитывается общее число неизвестных перемещений в методе перемещений?
За неизвестные в методе перемещений принимаются перемещения узлов от заданных воздействий: линейные перемещения шарнирных и жестких узлов и повороты жестких узлов . Число неизвестных угловых перемещений nθ равно количеству жестких узлов сооружения. Число независимых линейных перемещений узлов сооружения nΔ можно определить по его шарнирной схеме, полученной из заданного сооружения введением во все жесткие узлы, включая и опорные, режущих цилиндрических шарниров. Степень свободы полученной таким образом шарнирной схемы будет равна числу независимых линейных перемещений узлов заданной системы.
W = 2Y−C− Co, где Y – число узлов; C – число стержней, соединяющих узлы; Co – число опорных связей.
4. Метод перемещений основная система (с пояснениями)
Основная система метода перемещений (ОСМП) образуется наложением на узлы сооружения связей, препятствующим их угловым и линейным перемещениям. Если число наложенных на узлы угловых и линейных связей совпадает со степенью кинематической неопределимости сооружения, то в основной системе метода перемещений все узлы будут неподвижными.
При выборе основной системы метода перемещений угловые связи накладываются на узлы сооружения и препятствуют только их поворотам. Такие связи называются «плавающими» заделками. Линейные связи на узлы накладываются так, чтобы шарнирная схема заданного сооружения была геометрически неизменяемой.
5. Метод перемещений канонические уравнения ( с пояснениями)
Основная система отличается от заданной рамы наличием дополнительных связей, препятствующих узловым и линейным перемещениям узлов, а также появлением реактивных моментов во введенных заделках и реактивных сил в добавленных стержнях.
Основная система будет эквивалентна заданной только в том случае, если реакции во вверенных связях
основной системы от одновременного воздействия нагрузки и перемещений (z1, z2, z3), будут равны нулю и
т.д. По принципу независимости действия сил, система канонических уравнений при степени кинематической неопределимости 3 имеет вид:

r11*Z1+ r12*Z2+…+ r1n*Zn+R1F=0
r21*Z1+ r22*Z2+…+ r2n*Zn+R2F=0
….
rn1*Z1+ rn2*Z2+…+ rnn*Zn+RnF=0
Число уравнений всегда будет равно общему числу неизвестных и стержней и, следовательно, числу неизвестных перемещений.