

-
Организация системы ввода-вывода в вм
10.1. Назначение и основные требования к системе ввода-вывода вм
Назначение системы ввода-вывода – это обеспечение взаимодействия центральной части машины с внешней средой (пользователи, устройства, процессы), которое реализуется периферийными (или внешними) устройствами (ПУ или ВУ).
Связь процессора с периферийными устройствами осуществляется:
-
Через аккумулятор (регистр общего назначения).
-
Через оперативную память.
Оперативная память может непосредственно взаимодействовать с внешним устройством (ВУ) в режиме прямого доступа в память (ПДП).
Основные проблемы ввода-вывода.
-
Существует большое количество ВУ с различными параметрами, существенно отличающимися:
-
По скорости передачи данных.
-
Формату передачи данных (устройства последовательного, параллельного представления информации и т.д.).
-
Размерам передаваемых данных (биты, байты, слова, блоки, секторы).
-
Количеству выполняемых функций (чтение, запись, перемотка, подсчет, измерение).
-
Различные скорости работы центральной части машины и ВУ (требуется многоуровневая буферная память).
-
Асинхронность работы центральной части машины и ВУ (согласование операций в устройствах).
Требования к системе ввода-вывода
-
Гарантировать эффективное согласование центральной части машины и ВУ с целью достижения максимальной производительности.
-
Обеспечение распределения ВУ между одновременно выполняемыми задачами в системе (большинство машин работают в многозадачных режимах).
-
Обеспечение управления каждым конкретным внешним устройством.
-
Обеспечение дружественного интерфейса с пользователем.
10.2. Архитектура систем ввода-вывода
Существует два основных способа организации системы ввода вывода.
-
Прямой ввод-вывод (рис. 10.1).
-
Косвенный (канальный) ввод-вывод (рис.10.2).
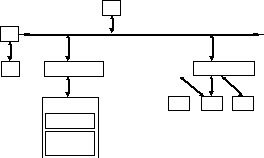
1 ОП
Системная шина
ЦП
2
ОП Контроллер ВУ Контроллер ВУ
ВУ ВУ1 ВУ2 ВУ3
Механизм
Носитель информации
Рис.10.1
При прямом вводе-выводе работа внешних устройств и памяти управляется центральным процессором, и все они подключаются к одной системной шине, при этом в зависимости от варианта подключения памяти может быть: в случае 1 – одно пространство адресов памяти и портов внешних устройств, а в случае 2 – отдельные адреса обращения к памяти и внешним устройствам. Процесс взаимодействия внешних устройств и центральной части машины определяется интерфейсом ввода вывода, под которым понимается совокупность сигналов, линий связи и алгоритмов управления, обеспечивающих заданный протокол взаимодействия внешних устройств и процессора. Под протоколом понимается последовательность формирования прямых и квитирующих сигналов взаимодействия (ответный сигнал называется квитирующим).

ВУ1 ВУ2 ВУ3 ВУ4
Контроллер 1 Контроллер 2
Канал 1
(Мультиплексный)
ЦП ОП
Канал 2 Контроллер ВУ (Селекторный)
Рис.10.2
На рис10.2 показан процесс ввода-вывода по способу, называемому канальным.
Каналы делятся на следующие.
-
Мультиплексные (обслуживают много ВУ, но медленных).
-
Селекторные (обслуживают мало ВУ, но быстродействующих).
Отличительная особенность канального ввода-вывода - процессор освобождается от управления внешними устройствами, функция процессора заключается в инициализации запуска канальных программ и завершении операции ввода-вывода, выполняемой с помощью канала, по соответствующему признаку из канала (по существу это многопроцессорная система).
Состав и сравнение функций контроллеров и каналов
Контроллер
-
В текущий момент времени он выполняет одну команду ввода-вывода, получаемую от процессора или канала, и одновременно обслуживает одно внешнее устройство.
В его функции входит:
-
Опознание своего адреса выборки.
-
Подтверждение готовности внешних устройств.
-
Управление операцией во внешнем устройстве.
-
Согласование форматов данных.
-
Согласование скоростей передачи (буферизация).
-
Фиксация момента и характера операции ввода-вывода.
Контроллер должен содержать:
-
Селектор адреса (логическая схема, выдающая разрешающий сигнал на один адрес).
-
Регистры управления (содержит команду) и состояния. Состояния характеризуются следующими битами: DONE, BUSY, ERROR, часто применяются биты приоритета.
-
Буферные регистры данных, которые служат для согласования форматов и скоростей передачи.
Канал
-
Выполняет целую канальную программу из многих команд.
-
Допускает одновременное управление несколькими внешними устройствами.
В его функции входит:
-
Опознание своего адреса и подтверждения готовности.
-
Прием команд процессора, инициализирующих работу канала, и нахождения в памяти своей канальной программы.
-
Поиск контроллера и внешнего устройства, участвующего в операции, и проверки их готовности.
-
Запуск канальной программы и управление обменом.
-
Сообщение центрального процессора о завершении операции и всей программы.
Канал представляет собой специализированный процессор с расширенными управлениями, и ограниченный арифметическими возможностями.