

БТПп4 / 8 семест / СУХТП / лабы сухтп / лабы / 1_konturnaya_ASR
.pdfГосударственное образовательное учреждение высшего профессионального образования
УФИМСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЯНОЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра автоматизации химико-технологических процессов
Исследование одноконтурной АСР с контроллером Yokogawa YS150
Учебно-методическое пособие к лабораторной работе
по курсу «Основы теории управления»
Уфа 2011
Учебно-методическое пособие предназначено для изучения принципа работы автоматической системы регулирования температуры, ознакомления с техникой исследования статических и динамических характеристик объекта управления.
Пособие содержит краткие теоретические сведения, описание принципов работы с одноконтурным многофункциональным контроллером YS150 фирмы «Yokogawa», задание на работу и порядок обработки результатов эксперимента.
Составитель Кирюшин О.В., доцент, канд. техн. наук
Рецензент Пручай В.С., доцент, канд. техн. наук
Уфимский государственный нефтяной технический университет, 2011
1. Цель работы
Целью работы является исследование принципов функционирования одноконтурной автоматической системы регулирования (АСР), ее свойств, а также статических и динамических характеристик системы и объекта управления.
Студент должен освоить технику исследования статических и динамических характеристик элементов системы регулирования, освоить технику определения статических характеристик объекта управления и переходных характеристик системы.
2. Теоретическая часть.
2.1 Модели статики и динамики объектов управления Математической моделью называется система математических соотно-
шений (уравнений), устанавливающих связь между входными и выходными сигналами звена в статике или динамике.
Обычно объекты в теории автоматического управления представляют в виде звеньев, имеющих входные сигналы U, поступающие со стороны других элементов АСР, возмущающие воздействия со стороны окружающей среды F, а также выходные сигналы Y, выдаваемые звеном под действием сигналов U и F (см. рисунок 1).
|
F |
|
U |
|
Y |
объект |
||
|
|
|
Рисунок 1
При исследовании объектов различают статический и динамический режимы работы. Соответственно, в теории автоматического управления выделяют модели статики и динамики.
В статическом режиме (статике) входной и выходной сигналы объекта (звена) постоянны, а их производные равны нулю.
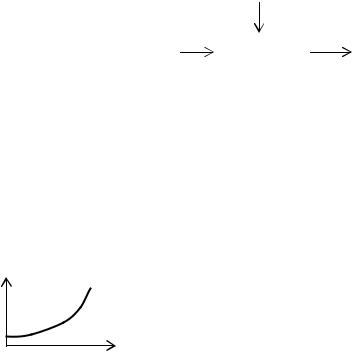
Статической характеристикой объекта называется зависимость установившихся значений выходной величины сигнала
ууст |
ууст от значения величины на входе системы, т.е. |
|
yуст = F(u). |
u |
Установившимся значением выходной величины |
сигнала ууст считается усредненное значение вы- |
|
Рисунок 2 |
ходной величины в установивишемся режиме, |
|
когда ее отклонения не превышают 5%. |
Статическая характеристика может быть изображена графически. Например, для исследуемого в данной лабораторной работе объекта, она имеет вид, представленный на рисунке 2.
Статическая характеристика называется линейной, если она имеет вид прямой линии, т.е. описывается функцией вида
ууст = К*u + а0,
где К – коэффициент наклона прямой (он же и коэффициент усиления объекта). Характеристика, представленная на рисунке 2, соответствует нелиней-
ному объекту.
Для снятия статической характеристики на реальном технологическом объекте его сначала выводят в нормальный режим эксплуатации, дожидаясь, когда входные и выходные сигналы объекта не установятся. После этого записывают установившиеся значения входных и выходных сигналов (они будут соответствовать одной точке статической характеристики), изменяют (ступенчато) входной сигнал на определенную величину, дожидаются нового установившегося режима, записывают новые установившиеся значения и т.д.
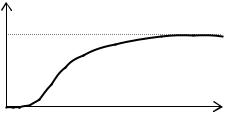
В динамике (при переходном процессе) входной и выходной сигналы изменяются во времени.
Переходным процессом называется реакция объекта на единичное ступенчатое входное воздействие при нулевых начальных условиях, т.е. при изменении u от 0 до 1 условной единицы и у(0) = 0.
|
|
Переходные процессы могут изо- |
||
у, С |
|
бражаться в виде |
кривой |
зависимости |
|
выходного сигнала от времени y(t). Если |
|||
ууст |
|
|||
|
начальные условия отличаются от нуле- |
|||
|
|
|||
|
|
вых, то кривая приводится к нулевым |
||
|
|
начальным условиям путем смещения |
||
|
t |
осей координат. |
Пример |
переходной |
|
кривой для рассматриваемого в лабора- |
|||
Рисунок 3 |
|
|||
|
торной работе объекта приведен на ри- |
|||
сунке 3.
2.2. Идентификация объектов управления
Существуют два принципиально различных метода построения моделей: аналитический и экспериментальный.
При первом способе модель строится на основе физико-химических зако-
нов, характеризующих процессы в исследуемом объекте. Законы Ньютона,
2
Кирхгофа, уравнения кинетики, материального и теплового балансов и др. являются основой для получения моделей.
Такой способ построения моделей достаточно сложен, так как требует знания различных параметров, таких как константы скоростей реакций, коэффициенты теплоотдачи и т.д., определение которых является самостоятельной задачей.
Методы построения моделей по экспериментальным данным изучаются в теории идентификации, которая является одним из важнейших разделов теории управления.
При экспериментальном способе построения моделей на основе предыдущего опыта задаются структурой модели (вид дифференциального уравнения и его порядок) и производят наблюдения (регистрацию) входных и выходных величин в процессе работы системы. Результаты наблюдений обрабатывают по
специальным алгоритмам и определяют параметры модели (например, коэффициенты дифференциального уравнения).
Если экспериментатор не вмешивается в процесс, а лишь наблюдает за его входом, то такой эксперимент называют пассивным. Чаще всего, если это допустимо по условиям производства, применяют активный эксперимент. При активном эксперименте на вход подают специальные изучающие (тестовые) сигналы. В качестве тестовых сигналов используются скачкообразные воздействия, импульсные, гармонические и др.
Активный эксперимент позволяет более точно определить параметры модели, нежели пассивный, особенно при наличии помех.
Аналитический метод чаще всего используется на этапе проектирования системы управления. Экспериментальный - на действующем процессе или пилотной установке. Наиболее эффективен комбинированный подход, когда структура модели определяется аналитическим методом, а параметры - экспериментальным.
Идентификация передаточной функции W(s) по переходной характеристике является одним из простейших методов. При идентификации передаточной функции вида
W(s) K |
1 |
b |
1 |
s ... |
b |
m sm |
e- s . |
||||
1 |
|
|
1 |
s ... |
|
|
n sn |
||||
|
a |
a |
|
||||||||
Идентифицируемыми параметрами передаточной функции являются: К - коэффициент усиления объекта, аi – коэффициенты знаменателя, bi – коэффициенты числителя, запаздывание , а также порядок W(s), т.е. значения n и m. Иногда порядок W(s) определяют исходя из физических соображений или имеющегося опыта, в противном случае определяют несколько моделей различного порядка.
Коэффициент усиления К определяют по формуле
K y уст ,
u
где ууст – установившееся изменение выходного сигнала при соответствую-
щем изменении входного |
u. |
|
|
|
|
|
|
|
|
|
|||||
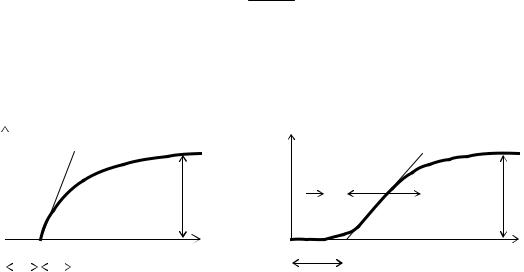
Предположим, что переходная кривая, полученная на объекте, имеет вид, |
|||||||||||||||
представленный на рисунке 4,а. |
|
|
|
|
|
|
|
|
|
||||||
у |
|
|
|
у |
|
|
|
|
|
||||||
|
|
|
|
|
ууст |
|
|
|
д |
|
Т |
ууст |
|||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Т |
|
t |
|
э |
|
|
|
|
|
t |
||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
а) |
|
|
Рисунок 4 |
|
|
б) |
|||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
Поведение такого объекта похоже на поведение инерционного звена с запаздыванием, передаточная функция которого имеет вид
W(s) = |
K |
e s , |
|
||
|
Ts 1 |
|
где Т – постоянная времени, определяющая инерционность объекта. Данной модели соответствует переходная характеристика вида
t
y(t) = K (1 - e T ).
Запаздывание определяется как время прошедшее от момента изменения входного сигнала до начала изменения выходного.
Для определения постоянной времени Т проводится касательная к точке перегиба графика и горизонтали, соответствующие оси времени и ууст. Постоянная Т определяется как расстояние по оси времени между этими точками пересечения (см. рисунок 4,а).
Если переходная кривая имеет вогнутость, то вводится дополнительное запаздывание д (рисунок 4,б), а модель характеризуется эквивалентным запаздыванием:
э = + д.
2.3. Функциональная схема исследуемой АСР
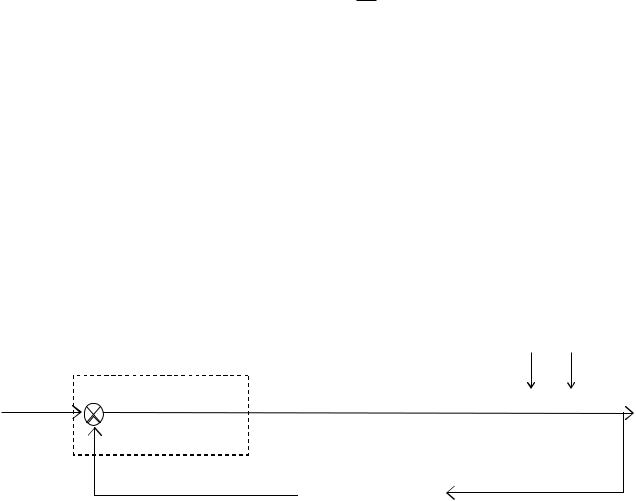
Исследуемая АСР состоит из объекта регулирования (паяльника), датчика температуры (термопары), регулятора «Yokogawa YS150» и исполнительного устройства (тиристорного преобразователя МБТ1Ф01М1) (рисунок 5).
f1 f2
yзад |
|
е |
Регулятор |
|
|
Исполнительное |
u |
Объект |
yтек |
||
(SV) |
|
|
|
«Yokogawa» |
(MV) |
устройство |
|
(паяльник) |
|
||
|
|
|
|
||||||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yизм |
|
|
|
|
|
|||
|
|
|
Датчик |
|
|
|
|
||||
|
|
|
(PV) |
|
температуры |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 5 - Функциональная схема АСР
Объект управления (ОУ) – паяльник. В качестве датчика температуры используется хромель-алюмелевая термопара (тип ТХА), установленная вместо жала паяльника. Принцип работы термопары основан на явлении термоЭДС, заключающейся в возникновении ЭДС на концах двух спаянных проволок из разных металлов при возникновении разницы температур между их концами.
Регулируемая величина – температура объекта. На схеме обозначены: утек
– текущее значение регулируемой величины, уизм - ее измеренное значение (строго говоря, текущее и измеренное значения отличаются друг от друга на величину погрешности датчика), узад – заданное значение регулируемой величины.
Величина ЭДС, пропорциональная температуре паяльника, передается в контроллер «Yokogawa YS150». На рисунке пунктиром показан корпус одноконтурного микропроцессорного контроллера Yokogawa YS150, включающий в себя кроме собственно регулятора звено для вычисления ошибки регулирования е как разницы между заданным и измеренным значениями регулируемой величины. В скобках приведены обозначения, принятые в контроллере.
Регулятор выдает унифицированный электрический токовый сигнал в диапазоне 4…20 мА на исполнительное устройство. Исполнительное устройство (симисторный преобразователь) управляет величиной (мощностью) переменного электрического тока, протекающего через паяльник. При токе 4 мА мощность равна нулю, при 20 мА – макимуму (напряжение 110 В).
Возмущающие воздействия fi – изменения температуры окружающей среды и напряжения питания тиристорного преобразователя.
Определения:
Задающее воздействие (заданное значение регулируемого параметра, задание узад) - воздействие на систему, определяющее требуемый закон изменения регулируемой величины.
Управляющее воздействие (u) - воздействие управляющего устройства на объект управления.
Возмущающее воздействие (f) - воздействие, стремящееся нарушить требуемую функциональную связь между задающим воздействием и регулируемой величиной.
Ошибка управления (е = узад – уизм) - разность между заданным и действительным значениями регулируемой величины.
Регулятор (Р) - комплекс устройств, присоединяемых к регулируемому объекту и обеспечивающих автоматическое поддержание заданного значения его регулируемой величины или автоматическое изменение ее по определенному закону.
Автоматическая система регулирования (АСР) - автоматическая система с замкнутой цепью воздействия, в которой управление (u) вырабатывается в результате сравнения истинного значения регулируемой величины с ее заданным значением.
Управление – формирование управляющих воздействий, обеспечивающих требуемый режим работы5 ОУ.
Регулирование – частный вид управления, когда задачей является обеспечение постоянства какой-либо выходной величины ОУ.
Автоматическое управление – управление, осуществляемое без непосредственного участия человека.
Дополнительная связь в структурной схеме АСР, направленная от выхода к входу рассматриваемого участка цепи воздействий, называется обратной связью (ОС). Обратная связь может быть отрицательной или положительной.
Принцип функционирования одноконтурной АСР: контроллер производит постоянное сравнение измеренного значения регулируемой величины уизм с заданным значением узад, определяя ошибку е = узад – уизм. Если текущее зна-
чение равно заданному, то регулятор не изменяет управляющее воздействие (АСР работает в установившемся режиме), в противном случае управляющее воздействие на объект u изменяется в соответствии с величиной ошибки. Чем больше ошибка регулирования (и дольше она наблюдается), тем больше изменение управляющего воздействия.
3 Описание лабораторной установки
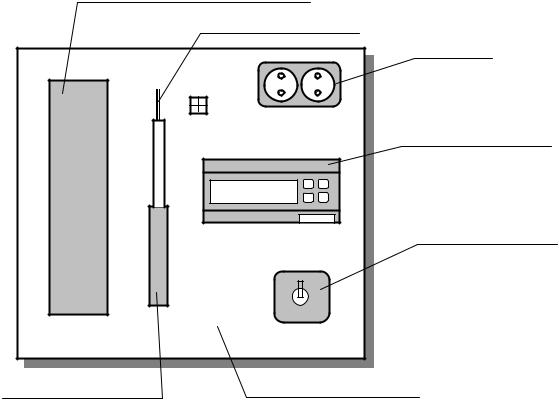
Расположение приборов на стенде лабораторной установки показано на рисунке 6 (на разных стендах расположение может отличаться; соединительные провода не показаны).
Регулятор Yokogawa YS150 |
|
Датчик (термопара) |
|
|
Розетки |
Х2 |
Тиристорный |
|
преобразователь |
|
МБТ1Ф01М1 |
|
Тумблер подачи |
|
напряжения |
|
на паяльник |
Х1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Монтажные клеммы |
||
|
|
|
|||
|
|
|
|||
|
|
|
|||
Объект (паяльник) |
|
|
|||
Рисунок 6
Всостав лабораторной установки входят:
-регулятор Yokogawa YS150;
-исполнительной устройство – тиристорный преобразователь типа МБТ1Ф01М1 с индикатором;
-объект управления – паяльник, в который вместо жала вставлен датчик температуры (термопара типа ТХА);
-розетки для питания регулятора, тиристорного преобразователя и паяльника; для подключения к ним у тиристорного преобразователя и регулятора имеются вилки;
-тумблер подачи напряжения на паяльник; в среднем положении (обозначено как «OFF») напряжение не подается, в верхнем положении («ON») - напряжение подается от тиристорного преобразователя;
-монтажные клеммы Х1 и Х2.
Спомощью монтажных клемм можно подключать вольтметр и миллиамперметр для измерения напряжения, подаваемого на паяльник (клеммы Х1), или тока, подаваемого регулятором на тиристорный преобразователь (клеммы Х2), а также внешний блок питания.
Подготовка установки к работе:
1) вилку тиристорного преобразователя включить в любую розетку; можно использовать переходник преобразователя напряжения из 220 В в 110 В переменного тока; 2) вилку регулятора включить во вторую розетку;
3) тумблер установить в положение «OFF»;
4) подключить вилку розетки к сети.
4 Тиристорный преобразователь
Блок управления тиристорами МБТ1Ф01М1 предназначен для «раскачки» мощных тиристоров, управляющих однофазной нагрузкой. У них выходное напряжение или мощность могут задаваться вручную, переменным резистором или кнопками на передней панели. В данной лабораторной работе блоки имеют токовый вход управления унифицированным электрическим сигналом постоянного тока диапазона от 4 мА до 20 мА.
Блок имеет панель индикации с алфавитно-цифровым индикатором. Кнопки на панели индикации позволяют выбрать режим работы. В рабочем режиме на индикацию выводится задаваемая мощность и служебная информация. Микроконтроллер осуществляет управление блоком, реализует выбранный метод управления мощностью, а также предоставляет дополнительные функции, такие как ограничение скорости изменения мощности и защиту от неполнофазного включения трехфазных блоков.
В приборе может быть реализован один из трех методов управления средней мощностью электронагревателей:
1)Фазоимпульсное управление тиристорами (ФИУ), которое позволяет плавно изменять эффективное напряжение и мощность на нагрузке. Тиристоры каждый сетевой полупериод открываются с регулируемой величиной фазового интервала открытого состояния тиристоров от 5 до 180°.
2)Метод равномерного по времени распределения рабочих сетевых периодов (РСП). При 100% мощности нагреватель включен постоянно и все периоды рабочие. При 90% мощности нагрузка включена 90 периодов из 100, при 50% мощности нагрузка включена 50 периодов из 100 и т.д.
3)В методе широтно–импульсной модуляции (ШМИ) нагрузка включается на долю периода ШИМ, который задается пользователем. Среднее значение выводимой мощности, в процентах от полной мощности нагревателя, определяется отношением времени включения к периоду ШИМ.
5 Регулятор
Одноконтурные многофункциональные контроллеры YS150 имеют возможность выполнять гибкое управления и арифметические операции, необходимые для управления технологическим процессом. Они позволяют осуществлять операции:
-показ, установка и оперирование входными/выходными значениями.
-вывод на экран переменной процесса в виде тренда,
-встроенное ПЗУ может сохранять параметры и пользовательские функции,
-автоматическое определение оптимальных параметров регулятора,
-обеспечение подключения к системам управления или компьютерам,
-самодиагностика прибора.
АСР, созданная на базе контроллера, может работать как система стабилизации (задание постоянно), следящая система (задание поступает извне и заранее регулятору неизвестно) и как система программного регулирования (задание изменяется по заранее заданной программе.
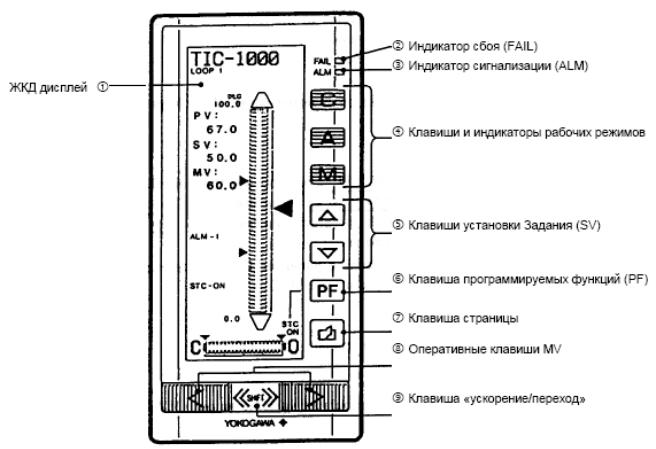
Лицевая панель прибора изображена на рисунке 7.
Рисунок 7 – Лицевая панель прибора
На лицевой панели прибора расположены:
-дисплей,
-индикатор сбоя (FAIL), загорающийся при возникновении неисправности в контроллере,