

4.2. Примеры решения типовых задач
Пример 1.Определить из
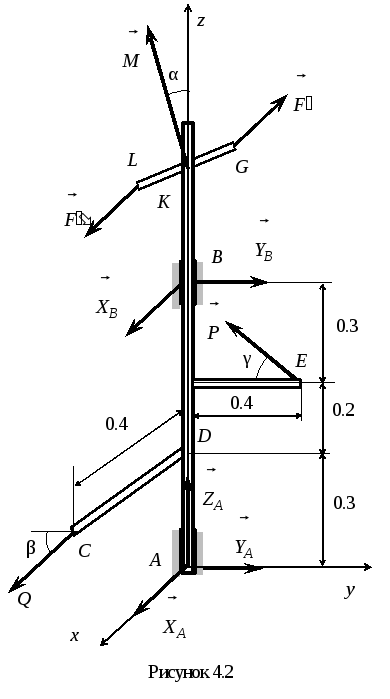
условий равновесия реакции подпятникаA, неподвижного цилиндрического
шарнираBи величину силы![]() для невесомого вертикального валаAB(рис. 3.2), к которому жестко прикреплены
стержниCDиKE, расположенные в
плоскостях, перпендикулярных осиz,
причем стерженьCDпараллелен осиx, а стерженьKE– осиy.
Конструкция нагружена силами
для невесомого вертикального валаAB(рис. 3.2), к которому жестко прикреплены
стержниCDиKE, расположенные в
плоскостях, перпендикулярных осиz,
причем стерженьCDпараллелен осиx, а стерженьKE– осиy.
Конструкция нагружена силами![]() и
и![]() ,
причем сила
,
причем сила![]() ,
,![]() кН
расположена в плоскости, перпендикулярной
осиz, и составляет с осью стержняKEугол γ = 300, а сила
кН
расположена в плоскости, перпендикулярной
осиz, и составляет с осью стержняKEугол γ = 300, а сила![]() – в плоскости, перпендикулярной осиx,
и составляет с горизонталью угол β =
600. Кроме того, к концам стержняLG, жестко прикрепленного к валу и
расположенного в плоскостиyOz,
приложены две равные, противоположно
направленные силы
– в плоскости, перпендикулярной осиx,
и составляет с горизонталью угол β =
600. Кроме того, к концам стержняLG, жестко прикрепленного к валу и
расположенного в плоскостиyOz,
приложены две равные, противоположно
направленные силы![]() и
и![]() ,
параллельные осиxи образующие пару
сил. Вектор-момент этой пары
,
параллельные осиxи образующие пару
сил. Вектор-момент этой пары![]() кН·м расположен в плоскостиyOzи
составляет с осьюz угол α = 300.
Размеры на схеме даны в метрах.
кН·м расположен в плоскостиyOzи
составляет с осьюz угол α = 300.
Размеры на схеме даны в метрах.
Решение
1) Объектом равновесия является вся конструкция (вал с прикрепленными к нему стержнями).
2) Активными силами, действующими на
объект равновесия, будут силы![]() ,
,![]() и пара сил, вектор-момент которой
и пара сил, вектор-момент которой![]() .
.
3) Отбрасывая связи (подпятник A и
неподвижный цилиндрический шарнирB),
заменим их действие на объект равновесия
реакциями![]() и
и![]() .
Реакция подпятника представлена
составляющими
.
Реакция подпятника представлена
составляющими![]() ,
,![]() и
и![]() ,
а неподвижного цилиндрического шарнира
– составляющими
,
а неподвижного цилиндрического шарнира
– составляющими![]() и
и![]() ,
параллельными соответствующим
координатным осям.
,
параллельными соответствующим
координатным осям.
4) Запишем уравнения равновесия (4.4) полученной пространственной системы сил в принятой системе координат (см. рис. 4.2) с помощью табл. 4.1.
Таблица 4.1
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
0 |
|
|
0 |
|
0 |
0 |
|
|
|
0 |
0 |
|
0 |
0 |
|
|
0 |
0 |
0 |
0 |
|
|
|
0 |
0 |
0 |
|
0 |
|
|
0 |
0 |
0 |
0 |
0 |
Продолжение табл. 4.1
|
|
|
|
|
|
|
0 |
|
– |
|
|
|
|
– |
|
|
|
0 |
– |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
Рассмотрим более подробно определение
момента силы относительно оси на примере
силы
![]() (см. рис. 4.2).
(см. рис. 4.2).
Способ 1.
Определим проекции силы![]() :
:
– на плоскость, перпендикулярную оси
x,![]()
– на плоскость, перпендикулярную оси
y,![]()
– на плоскость, перпендикулярную оси
z,![]()
При определении моментов силы
![]() относительно осейxиyплечом
будет одно и то же расстояниеAK.
Поэтому с учетом знаков получим
относительно осейxиyплечом
будет одно и то же расстояниеAK.
Поэтому с учетом знаков получим
![]()
При определении моментов силы
![]() относительно осиzучтем, что сила
уже расположена в плоскости, перпендикулярной
этой оси. Точка пересечения этой плоскости
с осью – это точкаК. Для нахождения
алгебраического момента силы
относительно осиzучтем, что сила
уже расположена в плоскости, перпендикулярной
этой оси. Точка пересечения этой плоскости
с осью – это точкаК. Для нахождения
алгебраического момента силы![]() относительно этой точки воспользуемся
теоремой Вариньона
относительно этой точки воспользуемся
теоремой Вариньона
![]()
Способ 2.
Запишем проекции силы![]() на оси координат:
на оси координат:
![]()
и координаты точки приложения силы
![]() – точкиE:
– точкиE:
![]()
Используя аналитические выражения (4.2), получим
![]()
![]()
![]()
Cуммируя элементы соответствующих строк таблицы и приравнивая эти суммы нулю, получим систему уравнений равновесия:
![]()
![]()
![]()
![]()
![]()
![]()
5) Решим полученную систему, начиная с уравнений, содержащих не более одной неизвестной силы. Так, из последнего уравнения определим
![]()
Затем с учетом найденного значения Qрешим 5-е уравнение и определим

Далее из уравнений находим:
из 1-го
![]()
из 3-го
![]()
из 4-го
![]()
и, наконец, из 2-го
![]()
Пример 2.Определить реакции
жесткой пространственной заделкиАдля невесомой рамыABC(рис. 4.3.),
расположенной в горизонтальной плоскостиxOyи нагруженной силой![]() ,
,![]() силами
силами![]() и
и![]() ,
образующими пару сил, вектор-момент
которой
,
образующими пару сил, вектор-момент
которой![]() ,
,![]() .
Кроме того, с помощью троса, переброшенного
через неподвижный блокDи прикрепленного
к концуСрамы, удерживается в
равновесии груз весом
.
Кроме того, с помощью троса, переброшенного
через неподвижный блокDи прикрепленного
к концуСрамы, удерживается в
равновесии груз весом![]() =
2 кН. Сила
=
2 кН. Сила![]() расположена в плоскости, перпендикулярной
осиy, и составляет с прямойBCугол α = 300 . СтерженьKE, к концам
которого приложены силы пары, параллельные
осиx, жестко прикреплен к раме и
расположен в плоскостиyOzпод углом
β = 600 к осиy. ПрямаяCDпараллельна осиx. Размеры на схеме
даны в метрах.
расположена в плоскости, перпендикулярной
осиy, и составляет с прямойBCугол α = 300 . СтерженьKE, к концам
которого приложены силы пары, параллельные
осиx, жестко прикреплен к раме и
расположен в плоскостиyOzпод углом
β = 600 к осиy. ПрямаяCDпараллельна осиx. Размеры на схеме
даны в метрах.
