

KnigaOmelyanenko
.pdf4.5. Украина
Киев – Харьков и Киев – Днепропетровск хотя и дали возможность при максимальной скорости 140 км/ч сократить время поездки с 8 до 5 часов, но качественно проблему не решили. Поэтому в конце 2004 года Кабинет Министров своим распоряжением одобрил «Концепцию Государственной целевой программы внедрения на железных дорогах скоростного движения пассажирских поездов на 2005-2015 годы», в соответствие с которой в 2005…2015 годах намечается внедрить движение пассажирских поездов со скоростью до 200 км/ч на линиях общей протяженностью 2593 км. Сеть скоростных железнодорожных магистралей обеспечит сообщение столицы Украины с крупными областными
èпромышленными центрами, а также со странами Западной Европы и СНГ. Схема линий скоростного движения представлена на ðèñ.4.9.
Мероприятия по внедрению скоростного движения предусматривают: строительство и реконструкцию объектов в Киевском железнодорожном узле; реконструкцию и модернизацию путевого хозяйства, контактной сети и систем энергоснабжения, устройств автоматики, телемеханики и связи; приобретения высокоскоростных поездов; строительство и реконструкцию локомотивных депо
èпунктов технического обслуживания скоростного подвижного состава и пр. Планируемые затраты – 27,346 млрд. грн.
Так как скоростные поезда будут курсировать со скоростью до 200 км/ч по существующим участкам инфраструктуры, то, в первую
Рис. 4.9. Схема скоростных магистралей Украины
121

Глава 4. Потребительский рынок высокоскоростных технологий
очередь, необходимо разделить грузовое и скоростное пассажирское движение. Поэтому целесообразно вести строительство дополнительных специализированных главных путей, а также использование на двухпутных участках одного пути для скоростных пассажирских поездов, а другого – для грузовых. Кроме того, необходимо увеличить радиус кривых не менее чем 1200 м, на всех перегонах внедрить бесстыковый путь и пологие стрелочные переводы, рассчитанные на скорость 160 км/ч.
Концепция предусматривает также работы по электрификации участков, где пока еще используется тепловозная тяга. В первую очередь, это участки Полтава – Харьков, Полтава – Красноград – Новомосковск, Красноград – Лозовая. Кроме электрификации должен быть выполнен большой объем работ по модернизации контактной сети и реконструкции действующих тяговых подстанций. То обстоятельство, что Юго-Западная, Одесская и Львовская железные дороги оборудованы контактной сетью переменного тока, а Донецкая, Приднепровская и Южная – постоянного тока, должно предполагать использование двухсистемного подвижного состава.
Относительно подвижного состава в концепции высказывается мысль,чтонапервомэтапецелесообразнозакупатьимпортныескоростныеэлектропоездаспринудительнымнаклономкузовавкривых,например электропоезд SM3 (S220), используемый в Финляндии (òàáë.3.5).
Ну и конечно, переход на скорость 200 км/ч обусловливает необходимость полной реконструкции устройств автоматики, телемеханики и связи.
Внедрение скоростного движения позволит по аналогии с Европой организовать дневное движение поездов, что значительно привлекательнее для пассажиров по сравнению с существующей сейчас у нас системой движения пассажирских поездов преимущественно в ночное время.
И, наконец, в концепции высказывается и обосновывается мысль, что в перспективе необходимо ставить задачу внедрения высокоскоростного движения пассажирских поездов с доведением их скорости до 350 км/ч для вхождения в общеевропейскую высокоскоростную систему железных дорог.
122

ГЛ А В А
5
МАГНИТОЛЕВИТИРУЮЩИЕ ПОЕЗДА
5.1. Поезда с электромагнитным подвесом
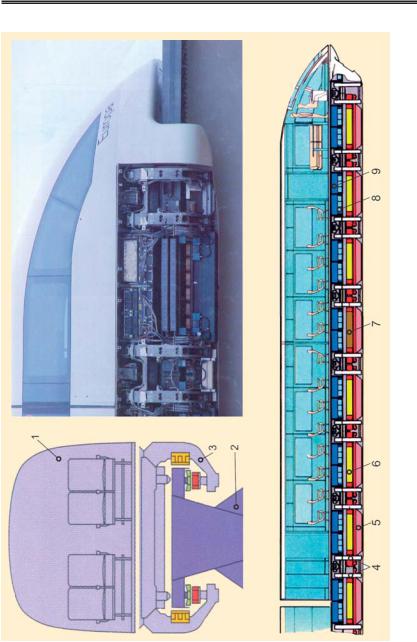
Электромагнитная система работает на принципе притяжения ферромагнетика к электромагниту. Реализацию этого принципа рассмотрим на примере конкретного поезда Transrapid 08, общая схема конструкции которого представлена на ðèñ. 5.1, а отдельных узлов — на ðèñ. 5.2 (нумерация позиций на этих рисунках принята общей). Электромагниты подвеса 5 и бокового направления 6 размещаются на шасси вагона 3, а ферромагнитные полосы закрепляются напротив этих электромагнитов на эстакаде 2 вдоль путевого полотна. Причем электромагниты охватывают снизу и сбоку путевую структуру. При питании током обмоток электромагнитов между ними и ферромагнитными полосами путевого полотна возникает сила притяжения. Если при определенном зазоре эта сила уравновесит силу веса вагона и силу бокового возмущения, то возникает бесконтактный электромагнитный подвес и боковое направление — так называемая электромагнитная левитация [40].
Сила тяги, приводящая вагон в движение, создается взаимодействием магнитного поля электромагнитов подвеса с бегущим магнитным полем трехфазной обмотки якоря линейного синхронного двигателя, размещенной в ферромагнитных полосах подвеса 10 на путевом полотне.
Электромагнитная система принципиально неустойчива, работает при воздушном зазоре между вагоном и путевым полотном 8…10 мм (из-за электромагнитных, теплофизических и весовых ограничений параметров электромагнитов) и поэтому при движении поезда с такими высокими скоростями требует чрезвычайно тонкого регулирования токов обмоток электромагнитов [41, 42].
Как и на обычной железной дороге, поезд включает в себя несколько вагонов. Каждый вагон состоит из кузова 1 и шасси левитации 3.
123
Глава 5. Магнитолевитирующие поезда
Рис. 5.1. Система электромагнитного подвеса (общий вид).
124
5.1. Поезда с электромагнитным подвесом
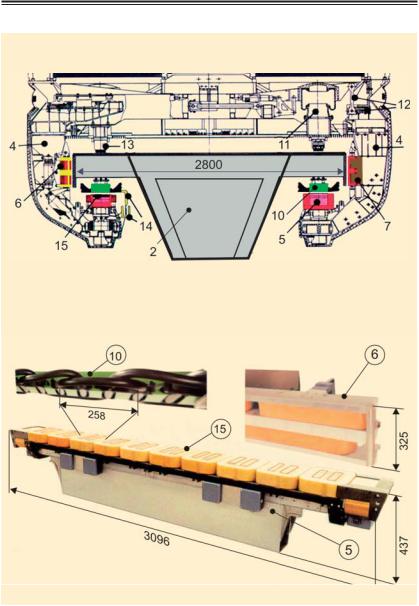
Рис. 5.2. Элементы электромагнитного подвеса, направления и тяги.
125

Глава 5. Магнитолевитирующие поезда
В зависимости от того, концевой вагон или промежуточный, кузов имеет пассажирский салон и кабину управления или только пассажирский салон. Кузов выполнен из алюминиевых полых профилей, заполненных полиэфиримидной пеной. Носовая часть концевых вагонов выполнена также двухслойной из стекловолокна GRP, так что она, как и окна, способна выдерживать удар массы в 1 кг при скорости 600 км/ч. Конструкция вагона может противостоять перепаду давления ±6000 Па, возникающему при входе в тоннель и при встречном движении поездов.
Шасси левитации состоит из четырех тележек, каждая из которых включает восемь (по четыре с каждой стороны) поперечных рам 4, объединенных между собой продольными балками. К каждой смежной паре рам через резинометаллические опоры с обеих сторон вагона крепятся блоки электромагнитов тяги и подвеса 5, а также электромагнитов системы бокового направления 6. В зоне сочленения смежных вагонов блоки магнитов крепятся к наружным поперечным рамам смежных тележек. Таким образом, налицо поезд из сочлененных вагонов с распределенной тягой. Между второй и третьей тележками вместо электромагнитов бокового направления установлены электромагниты вихретоковых тормозов 7. Над блоками электромагнитов размещаются блоки системы энергоснабжения собственных нужд и аккумуляторов 9, управления 8, а также пневматического оборудования и кондиционирования. Эти блоки помещены в контейнеры, которые имеют аэродинамичную форму, препятствуют доступу влаги и снега, а также обеспечивают достаточно простое и удобное обслуживание. Каждая тележка крепится к кузову вагона через четыре пневморессоры 11 посредством маятниковых подвесок 12, которые эффективно компенсируют колебания вагона с частотой 1,5 Гц. При движении в кривых пневморессоры амортизируют также и боковое смещение кузова относительно шасси левитации без ухудшения свойств вертикального подвеса. Это обстоятельство дает возможность обеспечивать требуемый зазор между вагоном и путем, не прибегая к регулированию электромагнитного подвеса и не воздействуя тем самым на систему тяги. Для удержания вагона на путевом полотне при обесточенных электромагнитах
126
5.1. Поезда с электромагнитным подвесом
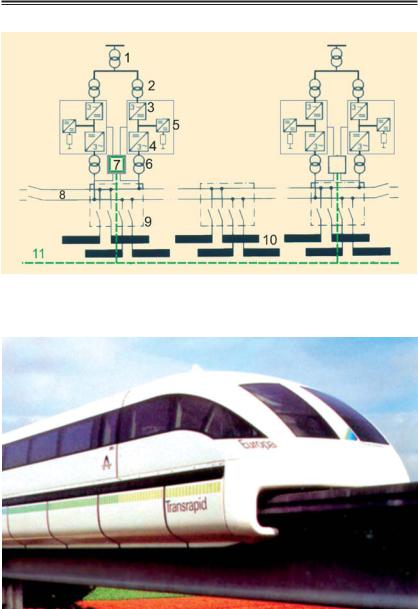
Рис. 5.3. Система электроснабжения
Рис. 5.4. Поезд Transrapid 08
127

Глава 5. Магнитолевитирующие поезда
предусмотрены механические опоры в виде скользящих башмаков 13. Определение положения вагона относительно путевого полотна обеспечивается взаимодействием специального датчика и индукционной линии 14.
Описанные выше элементы функционируют на вагоне в составе следующих систем: левитации, тяги, бокового направления, бортового электроснабжения и управления положением вагона в пространстве.
Электромагниты подвеса, тяги и бокового направления спроектированы таким образом, что при плотности тока в обмотке возбуждения 5…10 А/мм2 они в состоянии создавать в воздушном зазоре 8…10 мм индукцию 0,5…0,6 Тл и обеспечивать удельное значение сил подвеса на уровне 30…35кН/м, а сил боковой стабилизации — 14…15 кН/м. Электромагниты бокового направления выполнены с Ш-образным магнитопроводом и поперечно замкнутым магнитным потоком. Блоки электромагнитов подвеса и тяги представляют собой 12-полюсные магниты с продольным замыканием магнитного поля и полюсным делением 258 мм. Обмотки возбуждения промежуточных магнитов размещены на полюсах, а крайних для обеспе- чения стыковки со смежным блоком — на ярме. Здесь же располагаются датчики величины воздушного зазора. Эти магниты должны иметь максимальное отношение силы притяжения к массе, хорошую теплоотдачу и обеспечивать высокую динамику регулирования магнитодвижущей силы. Оптимальное значение высоты сердечника полюса, отсутствие полюсных наконечников, рациональная конфигурация ярма магнитопровода с минимумом ферромагнетика в зоне нижней части середины сердечника полюса обеспечили незна- чительное рассеяние магнитного поля и эффективную теплоотдачу от обмотки возбуждения, а в сочетании с коробчатой формой несущей конструкции блока магнитов и малый вес. В итоге получены магниты с отношением величины силы подвеса к массе 10:1.
При бесконтактном перемещении вагона относительно путевого полотна снабжение электроэнергией бортовых устройств обеспечи- вается линейными генераторами и батареями аккумуляторов, которые подключаются к сети бортового электроснабжения напряжени-
128

5.1. Поезда с электромагнитным подвесом
ем 440 В через главный регулирующий преобразователь. Две секции обмотки якоря линейного генератора 15 (ðèñ. 5.2), размещенные в каждом из десяти наконечников полюсов магнитов подвеса с шагом зубцового деления статора тягового линейного двигателя, соединяются в фазу. Пять таких фаз образуют один 5-фазный линейный генератор. Так что на каждом блоке магнитов размещено по 2 таких линейных генератора, а на вагоне — 30. При перемещении магнитов подвеса относительно путевого полотна пульсации магнитного потока, обусловленные зубчатостью статора линейного двигателя, наводят в обмотке якоря линейного генератора ЭДС с частотой, пропорциональной скорости и зубцовому делению. Главный регулирующий преобразователь обеспечивает согласование частот и напряжений линейных генераторов частотой и напряжением бортовой сети электроснабжения. С его выхода через 2-квадрантные преобразователи на IGBT-транзисторах мощностью 48 кВА с частотой опроса 100 кГц питаются обмотки возбуждения магнитов подвеса и направления. Вследствие своей высокой динамической способности главный регулирующий преобразователь демпфирует также пульсации мощности тягово-левитационной системы.
Поезда системы Transrapid 08 компонуются из концевых (промежуточных) вагонов, которые имеют следующие параметры: длина 26,99 (24,77) м, ширина 3,7 м, высота 4,16 м, число мест 92 (126), общая масса 62 (65) т.
Очевидно, что путевая структура должна быть высокого качества с точки зрения неровностей. Она выполняется на эстакаде. Различают два типа пути — «поднятый» и «под уклон». «Поднятый» путь не имеет уклонов и монтируется из балок двух исполнений: первое — длина балок 62 м, высота 2 м, масса 124 т, длина пролетов между опорами 31 м; второе — 25 м, 1 м, 44 т, 12,4 соответственно. Оба типа балок устанавливаются на опорах высотой 2,2…20 м. Путь «под уклон» имеет длину балки 6,2 м, высоту 0,4 м, массу 9 т, длину пролета 3,1 м, устанавливается на опорах высотой 1,35…2,2 м. Ширина направляющей у балок всех типов 2,8 м. На ее боковых поверхностях закреплены ферромагнитные полосы системы бокового направления. Их высота 325 мм, толщина 35 мм. На нижней плоскости на расстоянии 200 мм
129

Глава 5. Магнитолевитирующие поезда
от края закреплены сердечники якоря линейного двигателя шириной 185 мм, высотой 75 мм, в пазах которых с шагом 258 мм уложена волновая обмотка якоря из кабеля сечением 300 мм2. Расстояние между центрами путей составляет 5,1 м. Стрелки имеют радиус 2,3 км, длину 149 м для высокой скорости и 78,4 м для низкой (до 100 км/ч). Подвижная часть стрелки оснащена электромеханическим приводом.
Система тягового электроснабжения (ðèñ. 5.3) должна обеспечи- вать обмотку якоря линейного двигателя переменным током с регулируемой амплитудой и частотой. При условии, что на каждом пути между двумя смежными подстанциями, расположенными на расстоянии 30 км, должен следовать один поезд, мощность подстанции должна быть не менее 15 МВт. На ней устанавливаются входной 1, два преобразовательных 2 и два выходных 6 трансформатора, а также два преобразовательных блока, которые включают выпрямитель 3, инвертор 4 и тормозной блок 5. Особенностью системы электроснабжения является то, что питание от выходных трансформаторов подается не на всю длину обмотки якоря, а на ее отдельные участки — фидерные зоны 10 длиной 0,5…2 км. Эти зоны подключаются к фидерам 8 поочередно с помощью переключателей фидерных зон 9 по сигналам, поступающим от индукционной линии определения положения поезда 11 на системы управления 7.
Система Transrapid (ðèñ. 5.4) 29 декабря 2003 года введена в коммерческую эксплуатацию в Китае. Двухпутный участок длиной 30 км соединяет аэропорт Пудонг с центром Шанхая. Три 5-вагонных поезда движутся в обе стороны с интервалом 10 мин в тече- нии 18 ч в сутки. Время в пути 7,5 мин, максимальная эксплуатационная скорость 430 км/ч. Стоимость проекта 1,7 млрд долларов США.
5.2. Поезда с электродинамическим подвесом
Электродинамический подвес устроен и работает следующим образом. На поезде располагается источник постоянного магнитного поля, а на путевом полотне — короткозамкнутые контуры из токопроводящего немагнитного материала (алюминий). При перемещении источника магнитного поля относительно путевых кон-
130