


|
|
|
|
|
|
|
τ2 max |
= |
|
|
|
M к |
|
|
= |
|
|
|
|
M к |
|
|
, |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
2 |
А δ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 δ |
π D2 |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
π D2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де А |
= |
|
|
, і одержимо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
τ |
2 max |
= |
2 M к |
|
. |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
π D2 δ |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Кут закручування обчислимо за формулою |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
ϕ2 = |
M к l |
|
dS |
= |
|
M к l S |
|
. |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
G ∫ δ |
|
|
|
|
|
|
|
|
G δ |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
4 А 2 |
|
|
|
|
|
4 А 2 |
|
|
|
||||||||||||||||||||
Після перетворень одержимо: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
ϕ2 = |
|
M к l π D |
|
|
|
|
= |
|
|
4 M к l |
|
|
. |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
π D |
2 2 |
|
|
|
|
|
|
G π D3 δ |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
G |
δ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
4 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Відношення напружень: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
τ1 max |
|
3 |
M |
к |
|
|
|
|
π D2 |
δ |
|
|
|
|
|
3 D |
|
3 |
|
|
40 |
= 60 . |
|||||||||||
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
= |
|
|
|
|
|
|
||||
|
|
|
|
τ2 max |
π D |
δ 2 |
|
2 M к |
|
|
|
|
|
|
|
δ |
2 |
|
1 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||||||||||||||
Відношення кутів закручування:
ϕ |
|
3 M |
к |
l |
|
G |
π D3 δ |
|
3 |
|
D |
2 |
3 |
40 |
2 |
|||
1 |
= |
|
|
|
|
|
= |
|
|
|
|
= |
|
|
|
|
=1200 . |
|
G π D δ3 |
4 |
M к l |
4 |
|
|
|
||||||||||||
ϕ2 |
|
|
|
|
δ |
|
4 |
1 |
|
|||||||||
Отже, стержень замкнутого профілю виявляється істотно більш міцним та в ще більшому ступені жорстким, чим такий же незамкнутий.
1.11.Статично невизначувані системи при крученні
Статично невизначуваною називається кінематично незмінна система, у якій число невідомих зусиль, включаючи реакції опор і внутрішні силові факто-
33
ри (крутні моменти), більше числа рівнянь статики, які можна скласти для даної задачі.
Ступінь статичної невизначеності показує, скільки рівнянь спільності переміщень у геометричному аналізі деформування необхідно скласти, щоб можна було розв’язати задачу. План розв’язання задачі такий же, як і для статично невизначуваних систем при розтяганні–стисканні.
Отже розв’язання статично невизначених задач розглянемо на прикладах.
1.11.1. Розкриття статичної невизначуваності при послідовному з’єднанні ділянок стержня
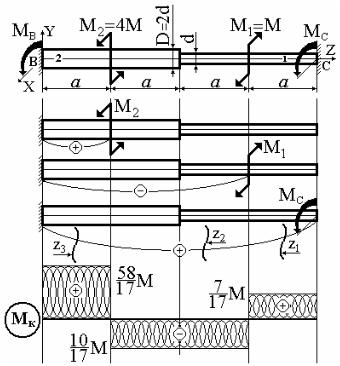
Розкрити статичну невизначеність вала (рис. 17), побудувати епюру крутних моментів та визначити розміри поперечного перерізу стержня, якщо допустиме дотичне напруження [τ].
Статична сторона задачі. |
|
Складемо рівняння рівноваги: |
|
∑M z = M C + M B − M1 + M 2 = M C + M B +3M = 0. |
(1.37) |
Геометрична сторона задачі
Для розкриття статичної невизначуваності необхідно скласти одне рівняння спільності переміщень.
Рисунок 17
34
Відкинемо праве затиснення і його дію замінимо моментом MC . Цей
момент визначається з умови, що поворот правого торцевого перерізу щодо лівого дорівнює нулю:
ϕBC =ϕM C +ϕM1 +ϕM 2 = 0. |
(1.38) |
Фізична сторона задачі
Скористаємося законом Гука при крученні для кутів закручування:
ϕ |
M C |
= |
|
M C 2а |
+ |
MC 2а |
, |
|||||
|
|
|
|
|
|
|||||||
|
|
|
|
GIp1 |
|
|
GIp2 |
|||||
|
|
|
|
|
|
|
||||||
ϕ |
M1 |
= − |
M1 а |
|
− |
M1 2а |
, |
|||||
|
|
|
||||||||||
|
|
|
|
GIp1 |
|
|
GIp2 |
|||||
|
|
|
|
|
|
|
||||||
ϕ |
M 2 |
= |
M 2 а |
. |
|
|
|
|
|
|||
|
|
|
|
|
|
|||||||
|
|
|
GIp2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||
Спільне розв’язання рівнянь. Підставимо (1.39) в (1.38):
ϕAB = |
M A 2а + |
M A 2а − |
M1 а − |
M1 2а + |
M 2 а = 0. |
|
GIp1 |
GIp2 |
GIp1 |
GIp2 |
GIp2 |
З урахуванням того, що M 2 = 4M ,
(1.39)
(1.40)
|
π d 4 |
|
|
|
π d 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Ip1 = |
|
|
, |
|
Ip2 =16 |
|
|
=16 Ip1 , |
|
та |
виконавши відповідні перетворення, |
||||||||||||||
32 |
|
32 |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
одержимо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2M |
|
4M |
|
||||
|
|
|
|
|
|
|
|
M A 2 |
+ |
|
|
|
|
|
|
− M − |
|
|
+ |
|
= 0, |
||||
|
|
|
|
|
|
|
|
16 |
16 |
16 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
звідки M A = |
|
7 |
M . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
17 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
58 |
|
|
|
|
||
З (1.37): |
M B = −3M − M A |
= −M |
3 |
+ |
|
|
|
|
|
= − |
|
|
M . |
|
|
||||||||||
17 |
17 |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Побудова епюри крутних моментів. За ділянками, показаними на рис. 17, обчислюємо значення крутного моменту:
35

|
|
|
|
|
|
|
M |
к |
(z )= M |
A |
= |
7 |
|
M ; |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
17 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
||||
|
|
|
|
|
|
|
M к |
(z2 )= M A − M1 = − |
M ; |
||||||||||||||
|
|
|
|
|
|
17 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
58 |
|
|
|
||||
|
|
|
|
|
|
|
M к |
(z3 )= M B |
= |
|
M . |
|
|
|
|
||||||||
|
|
|
|
|
|
17 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Перевіряємо правильність розв’язання задачі, для чого обчислимо кут по- |
|||||||||||||||||||||||
вороту ϕAB : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ϕ |
AB |
= 7M а |
−10M а − 10M а + 58M а = |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
17GIp1 |
|
17GIp1 |
|
17G 16Ip1 |
|
17G 16Ip1 |
||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||
= |
|
|
M а |
(112 −160 −10 +58)= |
|
|
|
M а |
|
(170 −170)≡ 0. |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
17G 16Ip1 |
|
|
|
|
|
|
|
17G 16Ip1 |
||||||||||||||
Визначення розмірів поперечного перерізу. Попередньо визначимо, на якій ділянці вала виникають найбільші напруження.
Полярні моменти опору окремих ділянок вала:
W = |
π d 3 |
, |
W = |
π D3 |
=8 |
π d 3 |
|
|
=8 W . |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
p1 |
16 |
|
|
|
p2 |
|
16 |
|
|
|
|
|
16 |
|
|
|
p1 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Одержимо наступне: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
перша ділянка діаметром d – τmax |
= |
|
7M |
; |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
17Wp1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
другаділянка діаметром d – τmax = |
|
10M |
; |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
17Wp1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
третя ділянка діаметром D – τmax = |
10M |
= |
|
|
10M |
|
= |
|
1,25M |
; |
||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
17Wp2 |
17 8Wp1 |
|
|
17Wp1 |
|||||||||||||||
четвертаділянка діаметром |
D – τmax |
= |
|
58M |
= |
7,25M |
. |
|||||||||||||||||
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
17Wp2 |
|
17Wp1 |
|
|
|
|
|||||||||
Таким чином, найбільш навантажений стержень на другій ділянці діаметром d .
З умови міцності τmax =16π Md 3к ≤[τ], одержимо
36