

Северин Методы БМ
.pdfсправа на матрицу S 1 , получим GnH E , откуда Gn H 1 . Поэтому следующая итерация метода Бройдена является итерацией метода Ньютона и приведет к точке минимума квадратичной функции.
Заметим, что в доказательстве этого свойства не используется условие точного одномерного поиска.
С в о й с т в о 5 . Если при минимизации квадратичной функции с положительно определенной матрицей Гессе H методом Бройдена выполняется точный одномерный поиск, то направления поиска s0 ,
s1 , …, sn 1 являются H -сопряженными.
Д о к а з а т е л ь с т в о . При выполнении условий данного утвер-
ждения требуется доказать, что |
|
|
sTi Hsk 0 , |
i 0, k 1 . |
(4.16) |
Докажем это свойство методом математической индукции. При k 1 с учетом (4.14) имеем:
sT0 Hs1 sT0 H 1d1 sT0 H(1G1g1) 1sT0 HG1g1 1(G1Hs0 )T g1 .
Отсюда по свойству 3 в виде G1p0 s0 и по условию точного одно-
мерного поиска (3.7) в виде sT0 g1 0 получим:
|
|
|
sT Hs (G p |
0 |
)T g sT g 0 . |
|
|
|||||||||||
|
|
|
0 |
1 |
|
1 |
1 |
1 |
1 0 |
1 |
|
|
|
|
|
|||
Предположим, что равенства (4.16) выполнены для некоторого k . |
||||||||||||||||||
|
|
|
|
|||||||||||||||
Докажем, что они выполняются и для k 1 . Для i 0, k имеем: |
|
|||||||||||||||||
sT Hs |
k 1 |
sT H |
|
d |
|
|
sT H(G |
g |
|
) |
|
sT HG |
g |
|
||||
i |
i |
k 1 k 1 |
|
k 1 i |
|
|
k 1 k 1 |
|
|
k 1 i |
k 1 k 1 |
|
||||||
k 1(Gk 1Hsi )T gk 1 k 1(Gk 1pi )T gk 1 .
По свойству 3 получим |
|
|
|
|
|
|
|
|
|
sT Hs |
|
|
sT g |
|
|
|
|
|
|
k 1 |
|
k 1 |
, |
i 0, k . |
(4.17) |
||||
i |
|
k 1 i |
|
|
|
|
|
||
111

Очевидно, что
gk 1 gi 1 (gi 2 gi 1) (gi 3 gi 2 ) (gk 1 gk ) .
С учетом обозначений (4.3) имеем:
|
|
k |
|
|
k |
|
|
|
gk 1 gi 1 (g j 1 g j ) gi 1 |
p j . |
|
||||
|
|
j i 1 |
|
|
j i 1 |
|
|
По свойству квадратичной функции (4.4) в виде p j Hs j получим |
|||||||
|
|
|
|
|
k |
|
|
|
|
gk 1 |
gi 1 Hs j . |
|
(4.18) |
||
|
|
|
|
j i 1 |
|
|
|
Равенство (4.17) примет вид |
|
|
|
|
|||
|
|
|
k |
|
|
k |
|
sTi Hsk 1 |
k 1sTi |
gi 1 |
Hs j |
|
k 1 sTi |
gi 1 sTi Hs j |
. |
|
|
|
|
|
|
|
|
|
|
|
j i 1 |
|
|
j i 1 |
|
По условию точного одномерного поиска (3.7) в виде sT g 0 и сде-
i i 1
ланного предположения индукции (4.16) окончательно получим для
i 0, k условие сопряженности sT Hs 0 . Следовательно, равен-
i k 1
ства (4.16) выполняются для всех k 1, n 1.
Это свойство показывает, что метод Бройдена является методом сопряженных направлений, поэтому он минимизирует квадратичную функцию с положительно определенной матрицей Гессе H при выполнении точного одномерного поиска не более чем за n итераций.
В случае, когда целевая функция не является квадратичной, применение уравнения (4.10) может привести к нежелательным явлениям. Во-первых, матрица G k может перестать быть положительно опреде-
ленной. Во-вторых, поправка Gk может стать неограниченной. В-
третьих, если направление sk случайно совпадет с направлением
112

предыдущей итерации, матрица Gk 1 становится вырожденной или неопределенной. В алгоритме Бройдена это тоже будет иметь место, если либо Gk pk sk , либо (sk Gk pk )T pk 0 . Тогда знаменатель формулы (4.10) обращается в нуль. Эта особенность снижает надежность метода Бройдена.
4.4. Метод Девидона – Флетчера – Пауэлла
По аналогии с формулой (4.9) коррекции ранга один рассмотрим формулу коррекции ранга два
Gk 1 Gk uuT vvT , |
|
(4.19) |
где используются ненулевые векторы u , v Rn и скаляры |
, |
R . |
Для системы линейных алгебраических уравнений (4.5) получим
(Gk uuT vvT )pk sk .
Раскрывая скобки, после преобразований имеем
Gk pk (uT pk )u (vT pk )v sk ,
где скобки содержат скалярные величины. Это уравнение превратится
в тождество, если |
|
положить |
u s |
k |
, |
1 (uT p |
k |
) , |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 (vT p |
k |
) . Тогда равенство (4.19) примет вид |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
1 |
G |
|
|
sk sTk |
|
|
Gk pk (Gk pk )T |
. |
|
|
|||
|
|
k |
k |
|
|
|
|
|
|||||||||
|
|
|
|
|
sTk pk |
|
|
(Gk pk )T pk |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
v Gk pk ,
(4.20)
Эта формула называется формулой Девидона – Флетчера – Пауэлла
(ДФП), а использующий ее квазиньютоновский метод называется ме-
тодом Девидона – Флетчера – Пауэлла. Формула (4.14) впервые пред-
ставлена в 1959 году американским математиком В. Девидоном как часть метода оптимизации, а в 1963 году метод, основанный на фор-
113
муле (4.20), развит английскими математиками Р. Флетчером и М. Д. Д. Пауэллом. Таким образом, метод ДФП основан на формулах (4.3), (4.7), (4.8) и (4.20). Как и в методе Бройдена первая итерация начинается из заданной начальной точки x0 , и в направлении антиградиента выполняется одномерный поиск:
G0 E , |
d0 g0 , |
0 |
arg min f (x0 d0 ) , |
x1 x0 0d0 . (4.21) |
|
|
|
|
|
Последующие итерации для k 1, 2, 3, выполняются по формулам:
|
|
pk 1 |
gk gk 1 , |
|
sk 1 xk xk 1 , |
(4.22) |
||||||||||||
v |
k 1 |
G |
p |
|
, |
|
G |
k |
G |
k 1 |
|
sk 1sTk 1 |
|
vk 1vTk 1 |
, |
(4.23) |
||
|
|
|
||||||||||||||||
|
|
k 1 k 1 |
|
|
|
|
|
sTk 1pk 1 |
|
vTk 1pk 1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
dk Gkgk |
, k arg min f (xk dk ) , |
xk 1 |
xk k dk . |
(4.24) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Итерации продолжаются до тех пор, пока выполняется условие |
||||||||||||||||||
|
|
|
|
|
|
|
xk 1 xk |
|
. |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
По формулам (4.21)–(4.24) составим алгоритм метода ДФП. |
|
|||||||||||||||||
А л г о р и т м м е т о д а Д Ф П . |
|
|
|
|
|
|
|
|
||||||||||
Входные параметры: x – начальная точка поиска, f (x) |
– проце- |
|||||||||||||||||
дура вычисления функции, |
– допустимая погрешность. |
|
||||||||||||||||
Выходной параметр x – конечная точка поиска.
1. |
Вычислить |
gx f (x) и положить d gx , G E . |
2. |
Вычислить |
r arg min f (x d) , s r d . |
|
|
|
3.Положить x x s , gy gx .
4.Вычислить gx f (x) , p gx gy , v G p .
5.Положить G G s sT  (sT p) v vT
(sT p) v vT  (vT p) .
(vT p) .
6.Вычислить d G gx .
114
7.Если 
 s
s 
 , то перейти к шагу 2.
, то перейти к шагу 2.
8.Остановиться.
Пр и м е р 4 . 3 . Для вычисления точки минимума квадратичной функции (1.3) с допустимой погрешностью 10–3 метод Девидона – Флетчера – Пауэлла затратил 3 итерации и 19 вычислений функции. При этом траектория минимизации квадратичной функции методом ДФП такая же, как и траектория минимизации этой же функции методом Бройдена из примера 4.1, представленная на рис. 4.1.
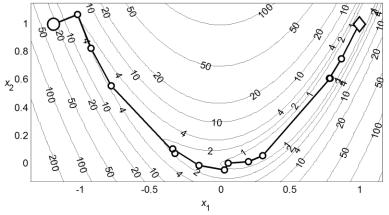
Пр и м е р 4 . 4 . На рис. 4.3 представлена траектория минимизации функции Розенброка методом Девидона – Флетчера – Пауэлла. Одномерный поиск с начальным единичным шагом производился комбинацией метода Свенна и метода квадратичной интерполяции с тремя точками при допустимой погрешности шага 10–5. Для нахождения точки минимума с допустимой погрешностью 10–3 метод ДФП использовал 17 итераций и 265 вычислений функции. Траектория минимизации такая же, как и траектория метода Бройдена из примера 4.2, представленная на рис. 4.2.
Рис. 4.3. Минимизация функции Розенброка методом ДФП
115

4.5. Свойства метода Девидона – Флетчера – Пауэлла
Эффективность метода ДФП определяется его свойствами. |
|
|
|
||||||||||||||||||||||||||
С в о й с т в о |
1 . |
Если в формуле ДФП (4.20) матрица G k |
сим- |
||||||||||||||||||||||||||
метрическая, то матрица Gk 1 также симметрическая. |
|
|
|
||||||||||||||||||||||||||
Д о к а з а т е л ь с т в о . |
Пусть матрица |
|
G k |
симметрическая, то |
|||||||||||||||||||||||||
есть GT G |
k |
. Тогда, по формуле ДФП (4.20) с обозначениями u s |
k |
, |
|||||||||||||||||||||||||
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 (uT p |
k |
) , |
|
v G |
k |
p |
k |
, |
|
1 (vT p |
k |
) придем к формуле (4.19). Ис- |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
пользуя свойства матриц, получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
GTk 1 (Gk uuT vvT )T GTk (uT )T uT (vT )T vT |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Gk uuT vvT . |
|
|
|
|
|
|
|
||||||||||
Следовательно, GTk 1 Gk 1 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
С в о й с т в о |
2 . |
Если в формуле ДФП (4.20) матрица G k |
поло- |
||||||||||||||||||||||||||
жительно определенная и sTk pk 0 , то матрица |
Gk 1 также поло- |
||||||||||||||||||||||||||||
жительно определенная. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Д о к а з а т е л ь с т в о . |
Пусть матрица G k положительно опреде- |
||||||||||||||||||||||||||||
ленная и xT G |
k |
x 0 |
x 0 . Тогда по формуле ДФП (4.20) имеем |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
T |
|
|
|
(xT sk )2 |
|
(xT Gkpk )2 |
|
|
|
|||||||
|
|
|
|
|
x G |
k |
|
x x |
G |
k |
x |
|
|
|
|
|
|
|
|
|
. |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
sTk pk |
|
|
pTk Gkpk |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Обозначая a G1k |
2x и b G1k |
2pk , получим |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
T |
|
|
|
x |
|
(aT a)(bT b) (aT b)2 |
|
(xT sk )2 |
|
|
|
|||||||||||||
|
|
|
|
|
x G |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
bT b |
|
|
|
|
|
sTk pk |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
В правой части этого равенства первое слагаемое неотрицательно в силу неравенства Коши – Буняковского – Шварца aT b 
 a
a 


 b
b 
 , а
, а
116
второе слагаемое неотрицательно, если sTk pk 0 . Покажем, что эти слагаемые не могут одновременно обращаться в нуль. Если первое
слагаемое равно нулю, то a b , |
а, значит, и x pk при 0 . Но |
||||||
тогда по условию xT s |
k |
pT s |
k |
0 |
. Поэтому xT G |
|
x 0 x 0 . |
|
k |
|
|
k 1 |
|||
Заметим, что условие этого свойства sTk pk 0 |
выполняется при |
||||||
условии точного одномерного поиска (3.7) в виде sT g 0 и обеспе-
k k 1
чении sk как направления спуска, для которого sTk gk 0 . Действи-
тельно, в силу равенств (4.22) и (4.24) sk kGkgk , k 0 . Поэтому
sT p sT (g g ) sT g sT g sT g gT G g 0 .
k k k k 1 k k k 1 k k k k k k k k
Свойство сохранения положительной определенности матрицы G k
гарантирует, что направление dk является направлением спуска.
С в о й с т в о 3 . При минимизации квадратичной функции с по-
ложительно определенной матрицей Гессе |
H методом ДФП с точ- |
|||||
ным одномерным поиском выполняются равенства: |
||||||
Gk 1Hsi si , |
|
|
|
|
|
|
i 0, k ; |
(4.25) |
|||||
sTi Hsk 0 , |
|
|
|
|
||
i 0, k 1 . |
(4.26) |
|||||
Д о к а з а т е л ь с т в о . Применим метод математической индук- |
||||||
ции. Из квазиньютоновского условия (4.5) в виде |
G1p0 s0 с учетом |
|||||
свойства квадратичной функции |
(4.4) в |
|
виде |
p0 Hs0 имеем |
||
G1Hs0 s0 . Отсюда по формулам (4.24) с точным одномерным поиском получим:
sT0 Hs1 sT0 H 1d1 sT0 H(1G1g1) 1(G1Hs0 )T g1 1sT0 g1 0 .
Таким образом, равенства (4.25) и (4.26) выполняются при начальных значениях k 0 и k 1 соответственно.
117

Предположим, что равенства (4.25) и (4.26) выполнены для неко-
|
|
|
|
|
||||||||||||||
торого k . Докажем, что они выполняются и для |
k 1 . Для |
i 0, k с |
||||||||||||||||
использованием равенств (4.24) получим: |
|
|
|
|
|
|
|
|
||||||||||
sT Hs |
k 1 |
sT H |
d |
|
|
sT H(G |
|
g |
|
) |
|
|
|
|||||
i |
|
i |
|
|
k 1 k 1 |
|
|
k 1 i |
|
k 1 k 1 |
|
|
|
|
||||
|
k 1 |
(G |
|
Hs )T g |
k 1 |
|
sT g |
k 1 |
. |
|
|
|
|
|||||
|
|
|
|
k 1 i |
|
|
k 1 i |
|
|
|
|
|
|
|||||
Применяя формулу (4.18) для градиента квадратичной функции, имеем
|
|
|
k |
|
|
k |
|
|
sTi Hsk 1 |
k 1sTi |
gi 1 |
Hs j |
|
k 1 sTi gi 1 |
sTi |
Hs j |
. |
|
|
|
|
|
|
|
|
|
|
|
|
j i 1 |
|
|
j i 1 |
|
|
По условию точного одномерного поиска (3.7) в виде sT g 0 и сде-
i i 1
|
|
|
|
ланного предположения индукции (4.26) получим для i 0, k |
условие |
||
сопряженности |
sTi Hsk 1 0 . Это и доказывает справедливость ра- |
||
венств (4.26) для произвольного k . |
|
||
С учетом |
свойства квадратичной функции (4.4) |
в виде |
|
pk 1 Hsk 1 , предположения индукции (4.25) и доказанного равенства
sTi Hsk 1 0 для i 0, k имеем:
|
|
|
|
pT |
|
G Hs pT |
|
s |
sT |
Hs 0 . |
|
|
|
|
|
|||||
|
|
|
|
k |
1 k 1 i |
|
k |
1 i |
k |
1 i |
|
|
|
|
|
|||||
Отсюда по формуле ДФП (4.20) получим: |
|
|
|
|
|
|
|
|
|
|||||||||||
G |
Hs G |
Hs |
sk 1(sTk 1Hsi ) |
|
Gk 1pk 1(pTk 1Gk 1Hsi ) |
|
G |
Hs , |
||||||||||||
|
|
|
|
|||||||||||||||||
|
k 2 |
i |
k 1 |
i |
|
sTk 1pk 1 |
|
|
|
|
pTk 1Gk 1pk 1 |
|
|
|
|
k 1 i |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
то есть по предположениям индукции Gk 2Hsi |
si для i 0, k . С уче- |
|||||||||||||||||||
том квазиньютоновского условия (4.5) в виде Gk 2pk 1 sk 1 |
и свой- |
|||||||||||||||||||
ства |
квадратичной |
|
функции |
(4.4) |
в |
виде |
pk 1 |
Hsk 1 |
имеем |
|||||||||||
|
|
|
|
|
|
|
||||||||||||||
Gk 2Hsk 1 sk 1 . |
Итак Gk 2Hsi si |
для |
i 0, k 1 , |
что доказывает |
||||||||||||||||
118
справедливость равенств (4.25) для произвольного k .
Это свойство показывает, что в силу равенств (4.26) метод ДФП является методом сопряженных направлений, поэтому он минимизирует квадратичную функцию с положительно определенной матрицей Гессе H при точном одномерном поиске не более чем за n итераций.
С в о й с т в о 4 . При минимизации квадратичной функции с положительно определенной матрицей Гессе H методом ДФП с точ-
ным одномерным поиском после n итераций Gn H 1 .
Д о к а з а т е л ь с т в о . При сделанных предположениях после n итераций метода ДФП в силу выполнения равенств (4.26) при k n 1 векторы s0 , s1 , …, sn 1 являются сопряженными. Поэтому по лемме 3.1 они линейно независимы. Представим их столбцами невырожденной матрицы S . Поскольку при этом выполняются равенства (4.25)
при k n 1 в виде GnHsi si для i |
|
|
|
||||||
0, n 1 , то имеем GnHS S . |
|||||||||
Умножая это равенство справа на S 1 , |
придем к равенству G |
n |
H E , |
||||||
|
|
|
|
|
|
|
|
|
|
откуда получим G |
n |
H 1 . Это означает, что после n итераций метода |
|||||||
|
|
|
|
|
|
|
|
|
|
ДФП аппроксимация обратной матрицы Гессе совпадет с ней. |
|
||||||||
С в о й с т в о |
5 . При минимизации квадратичной функции с по- |
||||||||
ложительно определенной матрицей Гессе H методом ДФП с точ- |
|||||||||
ным одномерным поиском после n итераций |
|
|
|||||||
|
|
|
n 1 |
T |
|
|
|||
|
|
|
H 1 |
sisi |
. |
|
(4.27) |
||
|
|
|
T |
|
|||||
|
|
|
i 0 si |
pi |
|
|
|||
Д о к а з а т е л ь с т в о . |
После n итераций метода ДФП в силу ра- |
||||||||
венств (4.26) при |
k n 1 |
векторы s0 , s1 , …, sn 1 являются сопря- |
|||||||
женными и линейно независимыми. Сформируем из них невырожденную матрицу S . Из условий сопряженности (4.26) ST HS D , где D –
диагональная матрица с элементами sTi Hsi . Поэтому H (ST ) 1DS 1 .
Тогда H 1 SD 1ST , где D 1 – диагональная матрица с элементами
119

1 (sTi Hsi ) . Перемножим матрицы в правой части последнего равенства
n 1 |
T |
||
H 1 |
sisi |
. |
|
T |
|||
i 0 si |
Hsi |
||
Отсюда с использованием свойства квадратичной функции (4.4) в виде pi Hsi получим равенство (4.27).
Представим формулу ДФП (4.20) в виде
Gk 1 Gk Ak Bk ,
где
A |
|
|
sk sTk |
, B |
k |
|
Gk pk (Gk pk )T |
. |
||
k |
|
|||||||||
|
|
sTk pk |
|
|
(Gk pk )T pk |
|
|
|||
|
|
|
|
|
|
|
|
|||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n 1 |
|
n 1 |
|
|
|
|
|
Gn G0 Ak Bk . |
|
|
||||||
|
|
|
|
|
k 0 |
|
k 0 |
|
|
|
Для квадратичной функции по свойствам 4 и 5 имеем: |
||||||||||
n 1 |
|
n 1 |
|
|
|
n 1 |
|
n 1 |
||
H 1 G0 Ak Bk , |
|
H 1 Ak , |
G0 Bk . |
|||||||
k 0 |
|
k 0 |
|
|
|
k 0 |
|
k 0 |
||
Отсюда следует, что начальное задание аппроксимирующей матрицы G0 E в процессе минимизации квадратичной функции компенсируются последней дробью в формуле (4.20).
Приведенные свойства метода Девидона – Флетчера – Пауэлла проявляются и при минимизации дифференцируемой целевой функции общего вида.
Вычислительные эксперименты, проведенные многими исследователями, показали, что метод Девидона – Флетчера – Пауэлла очень чувствителен к точности одномерного поиска. Если одномерная минимизация целевой функции проводится с невысокой точностью, то эффективность этого метода снижается.
120