

2.5 Определение динамических параметров электропривода
Динамическими называются параметры, определяющие характер протекания переходных процессов. В данном РГЗ рассматриваются п.п. , связанные в основном с изменением тока возбуждения генератора, при этом мы встречаемся с решением нелинейной задачи, так как генераторы обычно работают при насыщенном состоянии магнитной цепи, что не поддается аналитическому учету.
Однако при некоторых упрощающих предположениях использование аналитического метода возможно, а именно:
магнитная система генератора не насыщена, т.е. имеется линейная зависимость между магнитным потоком и током возбуждения;
влияние гистерезиса и вихревых токов мало и может не учитываться;
реакция якоря и последовательная обмотка генератора отсутствует, ток якоря на цепь возбуждения воздействуя не оказывает;
магнитный поток двигателя является величиной постоянной;
электромагнитная постоянная цепи якорей по сравнению с другими постоянными времени (ТмиТв) мала, и индуктивностью якорей генератора и двигателя можно пренебречь, т.е. принять
 .
.
С учетом этих допущений к динамическим параметрам системы генератор-двигатель относятся: электромагнитная постоянная времени обмотки возбуждения генератора – Тви электромеханическая постоянная времени электроприводаТмв секундах:
![]() , (2.21)
, (2.21)
где J– приведенный к валу двигателя эквивалентный момент инерции всей системы ЭП, кгм2:
![]() ,
(2.22)
,
(2.22)
где kJ– коэффициент инерции привода;
Jд–момент инерции якоря двигателя, кгм2.
![]() ,
(2.23)
,
(2.23)
где Lв– индуктивность обмотки возбуждения генератора, Гн;
Rвг– активное сопротивление обмотки возбуждения генератора, Ом.
Индуктивность обмотки возбуждения является переменной величиной и зависит от тока возбуждения.
При
нахождении Твпо формуле
(2.23), как правило, пользуются средним
значением индуктивности![]() ,
которое определяется на рабочем участке
изменения тока возбуждения от нуля до
расчетного значения
,
которое определяется на рабочем участке
изменения тока возбуждения от нуля до
расчетного значения![]() ,
соответствующего работе двигателя на
основной скорости.
,
соответствующего работе двигателя на
основной скорости.
В
данном РГЗ значение Lвсропределяется графоаналитическим
методом. Пользуясь кривой намагничивания![]() находят зависимость
находят зависимость![]() по формуле:
по формуле:
 , (2.24)
, (2.24)
где Фгр,Iвгр– расчетные
значения потока и тока возбуждения
генератора, определяемые по кривым![]() и
и![]() для заданного режима работы двигателя;
для заданного режима работы двигателя;
ном– коэффициент рассеивания магнитного потока при номинальном режиме, его обычно принимают равным 1,15;
р– число пар полюсов генератора;
Wов –число витков независимой обмотки возбуждения генератора.
Для
расчета Lвпо
(2.24) кривую намагничивания![]() разбиваем на отрезки, размер которых
на линейном участке характеристики
может быть крупнее, чем на нелинейном,
последний интервал разбиения должен
заканчиваться значениемIвгр,
при этом на каждом интервале определяем
отношение
разбиваем на отрезки, размер которых
на линейном участке характеристики
может быть крупнее, чем на нелинейном,
последний интервал разбиения должен
заканчиваться значениемIвгр,
при этом на каждом интервале определяем
отношение![]() и подставляя в (2.24) находим соответствующие
значенияLв.
Данные расчета сводят в таблицу 2.2. Для
получения достаточной точности расчета
общее число участков должно быть как
минимум 10–20.
и подставляя в (2.24) находим соответствующие
значенияLв.
Данные расчета сводят в таблицу 2.2. Для
получения достаточной точности расчета
общее число участков должно быть как
минимум 10–20.
Таблица 2.2 – Расчет индуктивности обмотки возбуждения
|
Iвг |
Фг |
Фг/Iвг |
|
(3)+(4) |
(5)2рWов |
Iвг срj |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Iвг1 |
Фг1 |
|
|
|
Lв1 |
|
|
… |
… |
… |
… |
… |
… |
… |
|
Iвгj |
Фгj |
|
|
|
Lвj |
|
П Р И М Е Ч А Н И Е:
![]() – среднее значение тока возбуждения
наj-ом расчетном
участке.
– среднее значение тока возбуждения
наj-ом расчетном
участке.
По
данным таблицы 2.2 строят зависимость
![]() .
.
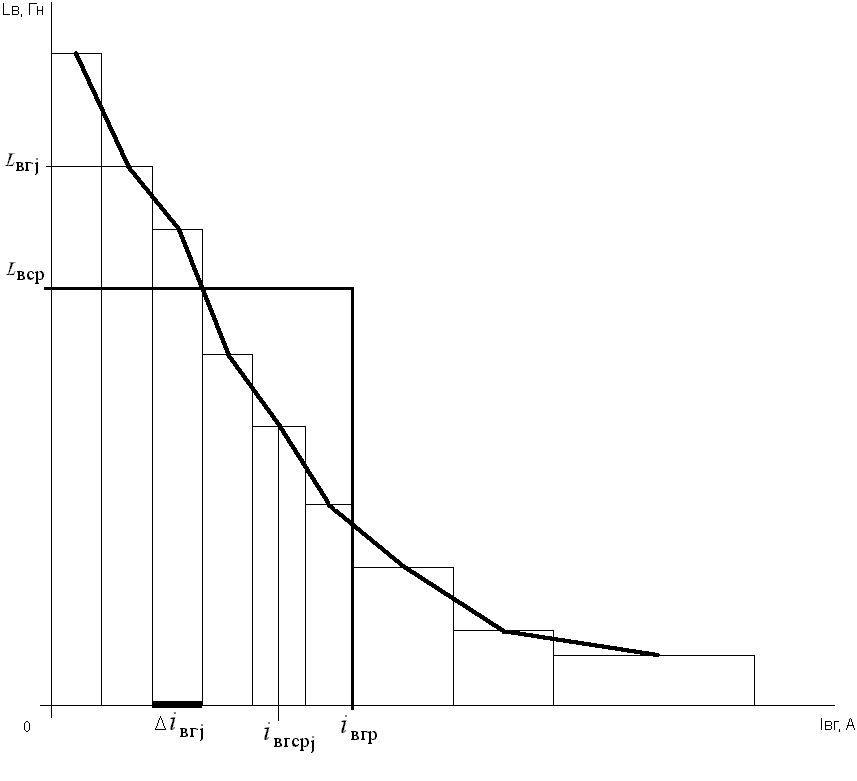
Рисунок 2.3 – Расчет Lвср
Для определения Lвиспользуется графическое интегрирование, основанное на использовании первой теоремы о среднем значении определенного интеграла [3]:
 , (2.26)
, (2.26)
где Iвгр– расчетный ток возбуждения генератора, соответствующий работе двигателя на основной скорости, А.
Расчет Lвср иллюстрируется на рисунке 2.4.
Полученное расчетное значение Lвсрсравните со значением, рассчитанным по (2.22) и сделайте вывод.