

6. Проектирование сателлитных передач
6.1. Общие сведения
Сателлитные зубчатые передачи, обладающие существенными преимуществами перед простыми, получили широкое распространение в космической, авиационной, автомобильной и приборостроительной отраслях промышленности.
Основное
преимущество – возможность получить
весьма большое передаточное отношение
при малых габаритах и весе передачи. В
авиации, например, применяли планетарный
механизм к винту переменного шага с
передаточным отношением
![]() .
.
Кроме этого, сателлитные передачи отличаются высокой надежностью, малыми потерями на трение и лучшими, чем в простых передачах, виброакустическими свойствами. В сателлитных передачах, выполняемых всегда по соостной схеме, центральный вал разгружен от изгиба, зубчатые колеса имеют лучшее распределение нагрузки по ширине зуба.
К недостаткам таких передач следует отнести некоторую конструктивную сложность, трудность сборки передачи, сложность подбора чисел зубьев, обеспечивающих выполнение заданных условий, большие потери на трения в некоторых типах передач.
6.2. Классификация сателлитных передач
Сателлитными называются зубчатые передачи, имеющие звенья, геометрические оси которых перемещаются в пространстве.
Звено, на котором установлены зубчатые колеса с подвижными в пространстве осями, называется водилом и обозначается буквой Н. (рис. 6.1)

Рис. 6.1. Схема дифференциальной двухрядной передачи с цилиндрическими колесами
Звено, состоящее из одного или нескольких зубчатых колес с подвижными в пространстве осями и совершающее сложное движение, называется сателлитом.
Неподвижная ось, вокруг которой вращается водило Н, называется основной осью. Зубчатые колеса 1 и 3, сцепляющиеся с сателлитами, оси которых совпадают с основной осью, называются центральными колесами.
Сателлитные передачи делятся на дифференциальные, планетарные, замкнутые дифференциальные и волновые.
Дифференциальной называется сателлитная передача, обладающая двумя или более степенями свободы и все зубчатые колеса которой подвижны (рис. 6.1.) В дифференциальных передачах применяются как цилиндрические, так и конические колеса (рис. 6.2).
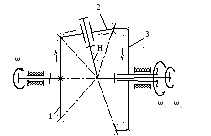
Рис. 6.2. Схема дифференциальной передачи с коническими колесами
Планетарная передача имеет одну степень подвижности и одно из центральных колес неподвижно (табл. 5.1, рис. 6.3).

Рис. 6.3. Схемы планетарных передач с коническими колесами
Планетарная передача может иметь два или три центральных колеса. При наличии трех центральных колес планетарная передача относится к типу ЗК (рис. 6.4).
Дифференциальные передачи с тремя центральными колесами применяется весьма редко.
Замкнутые дифференциальные передачи получили широкое распространение в авиационном редукторостроении, например, в редукторе ТВВДД-27. Наиболее распространенными являются трехступенчатые замкнутые передачи, в которых одна ступень дифференциальная (рис.6.5). Два из трех основных звеньев дифференциальной ступени соединены между собой с помощью дополнительной простой зубчатой передачи.

Рис. 6.4. Схемы передач типа 3К

Рис 6.5. Схемы замкнутых передач
Относительно недавно в авиационной и космической отрасли получили распространение волновые зубчатые передачи[11]. В отличие от планетарных или дифференциальных передач волновые имеют гибкое колесо F, которое может деформироваться.
Устройство, вызывающее деформацию, называется генератором Н (рис 6.6). Принцип действия волновых передач основан на преобразовании движения за счет перемещения волны деформации гибкого колеса. Жесткое колесо обозначается С.
К основным достоинствам волновой передачи можно отнести:
1. Малые массы и габаритные размеры при большой нагрузочной способности. Это связано с тем, что одновременно в зацеплении находится
20–40 % общего числа зубьев, а нагрузки на валы и опоры невелики.
2. Высокая кинематическая точность, которая обеспечивается многопарностью зацепления и наличием нескольких зон контакта зубьев.
3.
Большое передаточное отношение одной
ступени (![]() ).
).
4. Возможность передачи движения из герметизированного пространства.
5.
Достаточно высокий КПД (![]() )
при работе передачи в качестве редуктора.
)
при работе передачи в качестве редуктора.
6. Возможность использования не только в качестве редуктора или мультипликатора, но и в качестве дифференциала.

Рис.6.6. Схемы одноступенчатых волновых передач: а) двухволновая с роликовым генератором; б) трехволновая с роликовым генератором
К недостаткам волновых передач можно отнести: сложность изготовления гибкого колеса и генератора волн, большое значение минимального передаточного отношения.
Различают волновые передачи двухволновые, в которых зоны зацепления создаются генератором с двумя роликами (рис. 6.6 а) или дисковым генератором (рис. 6.7 б), либо кулачковым генератором (рис. 6.7 а).

Рис. 6.7. Схемы генераторов:
a – кулачкового; б –.дискового
В трехволновой передаче зоны зацепления создаются генератором с тремя роликами (рис. 6.6 б).
Кроме того, волновые передачи бывают с одним (Рис. 6.8 а,б), двумя (Рис. 6.8 в) или тремя жесткими колесами, а также применяются замкнутые волновые передачи.

Рис. 6.8. Кинематические схемы волновых передач