

Определение реакций в кинематических парах рычажных механизмов
Задача кинетостатического расчета механизма.
Использует принципы Даламбера + принцип освобождаемости от связей.
Принцип освобождаемости от связей:
Не нарушая движения (или покоя системы), можно отбрасывать отдельные связи и прикладывать к системе соответствующие этим связям реакции.
![]()
где
![]() - силы, действующие на систему и звено
- силы, действующие на систему и звено
![]() -
силы инерции;
-
силы инерции;
![]() - реакции связей.
- реакции связей.
![]()
Обозначим силы действия звена “q” на звено “P” черезRqp.
![]() O
O![]() O
O
A


![]()
S1
S2


![]() O
O

B


![]()
O



![]() O
O![]() O
O







![]()





![]()
![]()
![]() O
O
![]()
План скоростей План ускорений


Ползун:
![]() O
O![]() O
O






![]() O
O![]()

![]() O
O

![]() O
O
![]() O
O


![]() O
O
Шатун:
B








![]() O
O
![]()



![]() O
O![]() O
O![]() O
O![]() O
O![]() O
O![]() O
O
![]() O
O
![]() O
O
![]() O
O
![]() O
O
A
![]()
В
A ![]() O
O![]() O
O
O




![]()

![]()





![]() O
O![]() O
O![]() O
O
![]() O
O
![]() O
O![]() O
O
![]() O
O

![]() O
O
Силовой расчет двух поводковых групп
Большинство механизмов образовано наслоением двухповодковых групп Асура.
Рассмотрим графоаналитический способ их силового расчета в векторном изложении с последующим геометрическим решением.
Принято: Полную величину реакции вращательной кинематической пары изображать в виде двух компонентов. Составляющую реакции, направленную вдоль по звену, назовем нормальной и припишем индекс «n», вторую составляющую, направленную перпендикулярно к первой – назовем тангенциальной («t»).
В
С
А



![]()

![]()
![]() O
O![]()














![]() O
O![]() O
O![]() O
O![]() O
O![]() O
O![]() O
O![]()
![]() O
O![]() O
O![]() O
O
Для 2,3:
![]()
![]() находим из уравнения
находим из уравнения![]() для 2-го звена.
для 2-го звена.
![]() находим из уравнения
находим из уравнения![]() для 3-го звена.
для 3-го звена.
![]() и
и![]() находим из
находим из для звеньев 2 и 3, либо графически.
для звеньев 2 и 3, либо графически.








![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
Направления
![]() и
и![]() откладывают последними!
откладывают последними!
Силовой расчет ведущего звена (кривошипа)
Рассмотрим силовой расчет кривошипа. Чаще всего ведущее звено выполняет вращательные движения.
Из предыдущего расчета знаем R12
A
O



![]()



![]() O
O![]() O
O![]() O
O
![]()

![]()








G1 – вес
![]() -
сила инерции
-
сила инерции
![]()
На вал ведущего звена, если он непосредственно связан с электродвигателем, передается вращающий момент, необходимая величина которого является искомой.
Если в состав входит зубчатая передача редуктор в качестве промежуточного механизма, связывающего рычажный механизм с электродвигателем, то на ведущее звено рычажного механизма действует реакция со стороны кинематической цепи редуктора Rp1.
![]()
Если известно r01– радиус основной окружности зубчатого колеса 1, то
![]()
Тогда R01 найдем из уравнения
![]()
![]() и
и![]() называются уравновешивающими (название
привившееся, но не очень удовлетворительное).
называются уравновешивающими (название
привившееся, но не очень удовлетворительное).
![]() равно необходимому вращательному
моменту, который должен быть приложен
чтобы механизм двигался с заданной
скоростью, преодолевая заданную нагрузку.
равно необходимому вращательному
моменту, который должен быть приложен
чтобы механизм двигался с заданной
скоростью, преодолевая заданную нагрузку.
Приведенные силы
![]() и моменты
и моменты![]() характеризуют реальное действие сил
сопротивления на ведущее звено механизма
характеризуют реальное действие сил
сопротивления на ведущее звено механизма
![]()
и определяют крутящий момент на главном валу механизма или машины.
Лекция № 6
Курсовое проектирование по теории машин и механизмов (Новочеркасск 2004.)
Расчет маховика
Режим установившегося
движения механизмов характеризуется
периодическими колебаниями угловой
скорости входного звена относительно
ее среднего значения
![]() .
.
Причиной их возникновения
является неравенство работ движущих
сил Ад
и сил сопротивления Ас
внутри цикла установившегося движения.
Эти колебания вызывают дополнительные
динамические усилия в кинематических
парах, снижают коэффициент полезного
действия и надежность работы механизмов.
Уменьшение колебаний угловой скорости
осуществляют подбором масс звеньев,
т.е. установкой дополнительных масс,
которые выполняются в виде колеса с
тяжелым ободом и называются маховыми
массами или просто маховиками.
Интенсивность колебаний угловой
скорости оценивается коэффициентом
неравномерности
![]() Опытным путем установлены разумные
пределы значений
Опытным путем установлены разумные
пределы значений![]() для различных механизмов. Размеры
маховика выбирают таким образом, чтобы
обеспечивалась заданная неравномерность
движения входного звена.
для различных механизмов. Размеры
маховика выбирают таким образом, чтобы
обеспечивалась заданная неравномерность
движения входного звена.
Рассмотрим пример расчета маховика для механизма вытяжного пресса (рис. 5.1) по следующим исходным данным:
lо1А= 0,15 м; G2 = 250H; JS2 = 0,4 кг. м2;
lAB = 0,6 м; G3 = 200 Н; JS3 = 0,21 кг.м2.
lО2В = 0,29 м; G4 = 70 Н;
lО2С = 0,4 м; G5 = 200 Н;
lCД=0,2 м;
Частота вращения кривошипа
ni
= 50 об/мин, коэффициент неравномерности
движения
![]() .
Закон изменения сил полезного
сопротивления задан в виде графика
зависимости Р = Р (Н). Для того, чтобы
определить силу сопротивления, действующую
на выходное звено 5, в любой момент
времени, необходимо построить график
сил таким образом, чтобы масштаб по оси
перемещения Н совпадал с масштабом
плана положений цеили
осуществить графический переход от
одного масштаба к другому. На плане
механизма покажем все 8 положений
выходного звена и перенесем эти положения
на ось ОН диаграммы сил. Масштабный
коэффициент по оси ОР выбираем в
зависимости от заданного максимального
значения силы сопротивления Рmах.
В нашем примере Рmах
= 40000 Н.
.
Закон изменения сил полезного
сопротивления задан в виде графика
зависимости Р = Р (Н). Для того, чтобы
определить силу сопротивления, действующую
на выходное звено 5, в любой момент
времени, необходимо построить график
сил таким образом, чтобы масштаб по оси
перемещения Н совпадал с масштабом
плана положений цеили
осуществить графический переход от
одного масштаба к другому. На плане
механизма покажем все 8 положений
выходного звена и перенесем эти положения
на ось ОН диаграммы сил. Масштабный
коэффициент по оси ОР выбираем в
зависимости от заданного максимального
значения силы сопротивления Рmах.
В нашем примере Рmах
= 40000 Н.
Расчет проводим в следующей последовательности:
Осуществляем приведение сил по формуле
![]()
где
![]() и
и![]() - сила и момент сил, действующие наi-е
звено механизма;
- сила и момент сил, действующие наi-е
звено механизма;
![]() - скорость точки приложения силы
- скорость точки приложения силы![]() ;
;
![]() -
угол между векторами
-
угол между векторами![]() и
и![]() ;
;
![]() - угловая скоростьi-го
звена;
- угловая скоростьi-го
звена;
![]() - скорость приведения.
- скорость приведения.
В рассматриваемом примере
задана и подлежит приведению одна сила
- сила полезного сопротивления Р5)
приложенная к выходному звену (ползуну
5). Значения этой силы при рабочем ходе
механизма (положения 0-4) определяются
по диаграмме сил полезного сопротивления.
При холостом ходе механизма (положения
4-8) происходит отвод инструмента и сила
полезного сопротивления равна 0. Звено
5 совершает поступательное движение,
при котором скорости всех точек одинаковы,
следовательно, скорость точки

![]()
приложения силы Р5 равна скорости точки Д. Т.к. сила сопротивления Р5 направлена в сторону, противоположную вектору скорости Уд, то угол ai равен 180°, а cos aj = -1.
Т

![]()
![]() ,
где скорости точек Д и А определяются
из планов скоростей:
,
где скорости точек Д и А определяются
из планов скоростей:
![]()
По этой формуле рассчитывается
приведенная сила в каждом из восьми
положений механизма. Результаты расчета
приведены в табл. 5.1. Затем по рассчитанным
значениям Рn,
выбрав масштабный коэффициент сил
![]() (Н/мм), строим график
(диаграмму) изменения приведенной силы
в зависимости от угла поворота кривошипа
Рn
= Рn(
(Н/мм), строим график
(диаграмму) изменения приведенной силы
в зависимости от угла поворота кривошипа
Рn
= Рn(![]() )
за один цикл установившегося движения.
)
за один цикл установившегося движения.
Таблица5.1
|
Параметры
|
N положения механизма | |||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 | |
|
Р5, Н |
0 |
22000 |
38000 |
35000 |
0 |
0 |
0 |
0 |
|
(Pd)/(Pa) |
0 |
1,175 |
1,25 |
0,7 |
0 |
0,8 |
l,25 |
1,175 |
|
Рn,Н |
0 |
-25850 |
-47500 |
-17500 |
0 |
0 |
0 |
0 |
Т.к. все значения приведенной
силы Рn
в рассматриваемом примере отрицательные,
в подобных случаях для удобства
последующих построений их можно условно
принять положительными. Построенная
диаграмма зависимости Рn
(![]() )
также является диаграммой изменения
приведенного момента сил Мn
= Мn
(
)
также является диаграммой изменения
приведенного момента сил Мn
= Мn
(![]() )
в масштабе
)
в масштабе![]() (Нм/мм) если
(Нм/мм) если![]() =
791 Н/мм, то
=
791 Н/мм, то![]() = 791 • 0,15 = 118,75 Нм/мм.
= 791 • 0,15 = 118,75 Нм/мм.
2. Графическим интегрированием
диаграммы Мn
= Мn
(![]() )
по углу поворота кривошипа
)
по углу поворота кривошипа![]() строится диаграмма изменения работы
сил сопротивления Ас = Ас (
строится диаграмма изменения работы
сил сопротивления Ас = Ас (![]() )
(рис. 5.2, б), т.к. исследуемый механизм
является механизмом рабочей машины. В
случае механизма двигателя интегрируется
диаграмма приведенного момента движущих
сил и в результате получается график
работы движущих сил. Масштабный
коэффициент работ определяется по
формуле
)
(рис. 5.2, б), т.к. исследуемый механизм
является механизмом рабочей машины. В
случае механизма двигателя интегрируется
диаграмма приведенного момента движущих
сил и в результате получается график
работы движущих сил. Масштабный
коэффициент работ определяется по
формуле![]() ,
где
,
где![]() -
масштабный коэффициент угла поворота,
равный
-
масштабный коэффициент угла поворота,
равный![]() ,
гдеl
- длина отрезка (мм) на оси абсцисс
диаграммы, который соответствует углу
поворота кривошипа за 1 цикл движения
механизма, Н - длина отрезка оР (мм),
произвольно выбираемого на оси абсцисс
при графическом интегрировании. На рис.
5.2,а l=120
мм, Н=30 мм, откуда
,
гдеl
- длина отрезка (мм) на оси абсцисс
диаграммы, который соответствует углу
поворота кривошипа за 1 цикл движения
механизма, Н - длина отрезка оР (мм),
произвольно выбираемого на оси абсцисс
при графическом интегрировании. На рис.
5.2,а l=120
мм, Н=30 мм, откуда
![]()
![]()
При исследовании механизма
рабочей машины закон изменения
движущих сил обычно неизвестен. Поэтому
приближенно считают, что приведенный
к валу кривошипа исследуемого механизма
момент движущих сил Мд
является величиной
постоянной и, следовательно, график
работы движущих сил Ад
изображается прямой
линией. Поскольку рассматривается один
оборот кривошипа, соответствующий для
данного механизма одному циклу
установившегося движения, который
характерен равенством работ движущих
сил Ад
и сил сопротивления Ас в начале и конце
цикла, то прямую линию графика работ
движущих сил Ад
проводят, соединяя
начальную и конечную точки графика
работ сил сопротивления Ас. График
приведенного момента движущих сил Мд
= Мд (![]() )
можно построить графическим
дифференцированием графика работАд
= Ад
(
)
можно построить графическим
дифференцированием графика работАд
= Ад
(![]() ).
).
Если исследуется механизм
двигателя, то неизвестным является
закон изменения сил сопротивления. В
этом случае приведенный момент сил
сопротивления считается постоянным,
а график работы этих сил Ас сражается
отрезком прямой линии, соединяющей
начальную и конечную точки графика Ад
= Ад
(![]() ).
).

3. Из уравнения изменения кинетической
энергии механизма Т - То = Ад- Ас,
следует, что отрезки ординат, заключенные
между графиками Ад= Ад(![]() )
и Ас = Ас (
)
и Ас = Ас (![]() ),
представляют собой приращения кинетической
энергии в каждом положении механизма.
Принимая эти отрезки за ординаты
самостоятельного графика, строим
диаграмму изменения приращения
кинетической энергии
),
представляют собой приращения кинетической
энергии в каждом положении механизма.
Принимая эти отрезки за ординаты
самостоятельного графика, строим
диаграмму изменения приращения
кинетической энергии
![]() T
=
T
=
![]() Т
(
Т
(![]() )
рис. 5.2,в. Если отрезки откладываются
без изменений, то масштабный коэффициент
)
рис. 5.2,в. Если отрезки откладываются
без изменений, то масштабный коэффициент![]() .
.
4. Рассчитываетсяприведенный момент инерции механизма
без маховика(поэтому обозначается
через![]() Jn)
по формуле:
Jn)
по формуле:
![]()
где miиJsi– масса и центральный момент инерцииi-го звена;
Vsiи![]() - скорость центра масс и угловая скоростьi-го звена;
- скорость центра масс и угловая скоростьi-го звена;
![]() - угловая скорость звена приведения
(начального);
- угловая скорость звена приведения
(начального);
N1 – частота вращения начального звена (кривошипа О1А), для рассматриваемого механизма N1=50 об/мин;
![]()
Пример: Для рассматриваемого механизма:
![]()
Подставив выражения для угловых скоростей в виде
![]()
получим
![]()
Последовательность и
результаты расчета
![]() Jn
для восьми исследуемых положений
механизма приведены в табл. 5.2.
Jn
для восьми исследуемых положений
механизма приведены в табл. 5.2.
По рассчитанным значениям
![]() Jn,
выбрав масштабный коэффициент
Jn,
выбрав масштабный коэффициент
![]() (кгм
/мм),строим диаграмму
изменения приведенного момента инерции
механизма в зависимости от угла поворота
кривошипа
(кгм
/мм),строим диаграмму
изменения приведенного момента инерции
механизма в зависимости от угла поворота
кривошипа
![]()
![]() Jn
=
Jn
=
![]() Jn
(
Jn
(![]() )за 1 цикл установившегося
движения (рис. 5.3, б).
)за 1 цикл установившегося
движения (рис. 5.3, б).
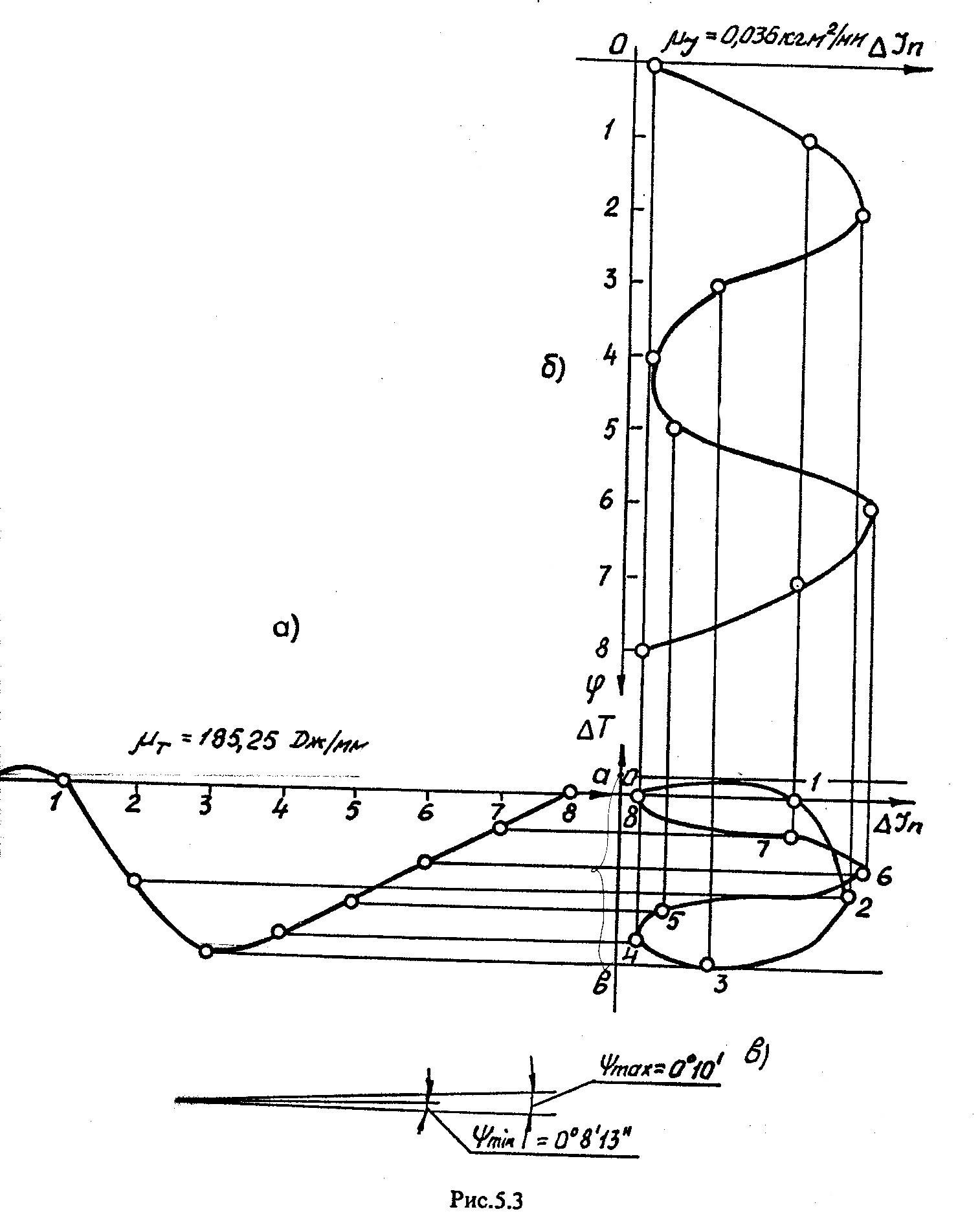
Таблица 5.2
|
Параметры
|
Положения механизма | |||||||
|
0,8 |
1 |
2 |
3 |
4 |
5 |
б |
7 | |
|
VS2/VA |
0,5 |
0,825 |
0,975 |
0,8 |
0,5 |
0,65 |
1,075 |
0,75 |
|
VS3/VA |
0 |
0,575 |
0,7 |
0,45 |
0 |
0,4 |
0,7 |
0,6 |
|
VS4/VA |
0 |
1,1 |
1,275 |
0,725 |
0 |
0,425 |
1,3 |
1,1 |
|
V3/VA |
0 |
0,125 |
1,2 |
0,65 |
0 |
0,625 |
1,25 |
1,15 |
|
Vba/Va |
1 |
0,175 |
0,375 |
0,625 |
1 |
0,625 |
0,375 |
1,125 |
|
|
0,25 |
0,25 |
0,25 |
0,25 |
0,25 |
0,25 |
0,25 |
0,25 |
|
Vb/Va |
0 |
0,875 |
0,975 |
0,65 |
0 |
0,625 |
1,1 |
1,15 |
|
|
0,52 |
0,52 |
0,52 |
0,52 |
0,52 |
0,52 |
0,52 |
0,52 |
|
|
0,1656 |
1,33 |
1,702 |
0,6555 |
0,1656 |
0,329 |
1,8 |
1,314 |
5. Исключением
(графическим или табличным)
общего параметра
-угла поворота кривошипа
![]() из диаграмм
из диаграмм![]() T
=
T
=![]() T
(
T
(![]() )
и
)
и![]() Jn
=
Jn
=![]() Jn
(
Jn
(![]() )строится диаграмма
зависимости
)строится диаграмма
зависимости
![]() T
=
T
=![]() T(
T(![]() Jn),
называемая диаграммой
энергомасс или диаграммой Виттенбауэра
(рис. 5.3, в). Определяются максимальный
и минимальный углы наклона касательных
к диаграмме по формулам:
Jn),
называемая диаграммой
энергомасс или диаграммой Виттенбауэра
(рис. 5.3, в). Определяются максимальный
и минимальный углы наклона касательных
к диаграмме по формулам:

Под углами
![]() и
и![]() к положительному направлению оси
абсцисс проводятся касательные к
диаграмме энергомасс. Т.к. значения
коэффициента неравномерности движения
5 невелики, то разница между углами
к положительному направлению оси
абсцисс проводятся касательные к
диаграмме энергомасс. Т.к. значения
коэффициента неравномерности движения
5 невелики, то разница между углами![]() и
и![]() получается также небольшой. Поэтому
точка пересечения касательных
располагается, как правило, за пределами
чертежа.
получается также небольшой. Поэтому
точка пересечения касательных
располагается, как правило, за пределами
чертежа.
Момент инерции маховика в этом случае определяется через отрезок ав, отсекаемый, касательными на оси ординат, по формуле
![]()
Для рассматриваемого механизма:

6. По рассчитанному моменту инерции, выбрав конструкцию, определяем размеры маховика. Обычно маховик выполняется в виде колеса, имеющего массивный обод, соединенный со ступицей спицами (рис. 5.4).

При расчете размеров моментами инерции этих соединительных частей пренебрегают и приближенно считают, что масса маховика m равномерно распределена по окружности среднего диаметра обода D. Тогда момент инерции маховика определяется равенством:
![]()
Если выразить массу обода через его объем и плотность материала, то
![]()
Где в и h – размеры сечения обода;
![]() - плотность материала.
- плотность материала.
Для чугуна
![]()
Для стали
![]() в зависимости от марки. Обычно принимают
в зависимости от марки. Обычно принимают![]() ,
тогда
,
тогда
![]() ,
,![]()
Диаметр D
маховика выбирается из конструктивных
соображений. При заданной величине JM
масса маховика обратно пропорциональна
квадрату его диаметра. Диаметр
ограничивается критической окружной
скоростью, при которой происходит
разрушение материала маховика условия
![]() ,
гдеVK
- критическая окружная скорость (для
чугунного литья VK
= 40 м/с, для стального VK
= 100 м/с); NM
- частота вращения маховика. Стальные
маховики применяют при NM
> 300 об/мин.
,
гдеVK
- критическая окружная скорость (для
чугунного литья VK
= 40 м/с, для стального VK
= 100 м/с); NM
- частота вращения маховика. Стальные
маховики применяют при NM
> 300 об/мин.
Пример: В нашем примере:
![]()
Принимаем D = 1,5 м, тогда
![]()
При этом
![]()
В случае,если размеры и масса маховика при установке на валу кривошипа получаются очень большими, маховик устанавливают на быстроходном валу двигателя. При этом момент инерции маховика пересчитывают по формуле
![]()
где i – передаточное отношение между быстроходным валом и валом кривошипа.
Пример: Пусть
![]()
тогда
![]()
![]()
Тогда VK выбираем 100 м/с,
![]()
Принимаем D
= 0,6 м,
![]()
тогда ![]()
![]()
![]() .
.
Размеры маховика и его масса значительно уменьшаются. Однако при этом необходимо обеспечивать достаточную надежность и долговечность передаточных механизмов, способных выдерживать резкие колебания нагрузки, и жесткость быстроходного вала.
Лекция №7 (29.10.06)