

1.6. Проектирование системы команд
В общем случае в спецкомпьютерах выделяют следующие группы алгоритмов решения задач:
1) методы решения пользовательских задач;
2) методы решения служебных задач;
3) алгоритмы решения специальных задач.
Пользовательские задачи включают в свой состав:
1)задачи управления бортовыми системами;
2) задачи комплексной обработки входной информации;
3) задачи организации взаимодействия в локальной сети или между подсистемами управления агрегатами и механизмами подвижной платформы.
Служебное программное обеспечение как правило реализует алгоритмы решения более локальных задач. К ним относят:
1) алгоритмы диспетчеризации и прерывания вычислений;
2) алгоритмы защиты программ и исправления ошибок;
3) методы контроля и работоспособности бортовых систем и утилиты.
К специальным задачам относят задачи имитации исходных данных для моделирования процессов передвижения используемой платформы, а также для решения задач тактического характера.
Анализ параметров алгоритмов, как правило, выполняется с использование языковых и программных средств. С этой целью каждой вершине граф-схемы алгоритма решаемой задачи ставится в соответствие команда машины. После этого выполняется расширение полученного набора команд с использованием заданных методов адресации и варьирования полем КОП. Полученная система дополняется командами, контроля и диагностики, управления работой компьютера, командами ввода-вывода и другими управляющими словами, позволяющими получить требуемые режимы работы системы.
Рассмотрим
блок-схему алгоритма расчета функции
 в соответствии с формулой (1.1) рис. 1.6 и
исследуем методику решения поставленной
задачи.
в соответствии с формулой (1.1) рис. 1.6 и
исследуем методику решения поставленной
задачи.
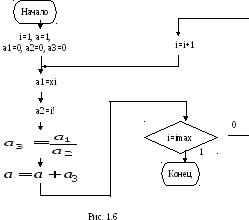
Основной недостаток
алгоритма вычисления
 заключается в сложности и длительности
формирования результата с использованием
команд:
заключается в сложности и длительности
формирования результата с использованием
команд:

Выполним модернизацию
алгоритма, учитывая, что вычисления на
каждом
 -м
шаге выполняются по правилу:
-м
шаге выполняются по правилу:
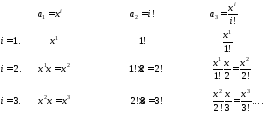
Иными словами в
каждом
 -ом
цикле вычислений легко прослеживается
зависимость:
-ом
цикле вычислений легко прослеживается
зависимость:
 .(1.9)
.(1.9)
С учетом равенства (1.9) модернизируем граф схему алгоритма (рис. 1.6) и поставим в соответствие всем вершинам ГСА команды компьютера:
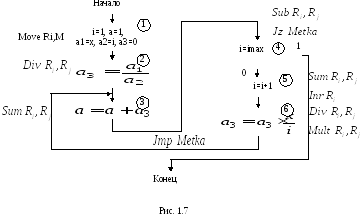
В полученной выше
граф-схеме удалось избежать долговременных
повторных вычислений в командах
 и
заменить их на множительно-делительные
преобразования свойственные практически
всем высокоуровневым языкам компьютера.
Общая таблица команд для вычисления
и
заменить их на множительно-делительные
преобразования свойственные практически
всем высокоуровневым языкам компьютера.
Общая таблица команд для вычисления при этом принимает следующий вид:
при этом принимает следующий вид:
Таблица 1.4
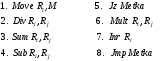



Итак, базовая система команд без учета команд служебного и специального ПО будет содержать 8 управляющих слов.
Далее, пусть в компьютере необходимо реализовать следующие методы адресации операндов в памяти:
1) прямая адресация;
2) косвенная регистровая адресация;
3) автоинкрементная адресация;
4) базово-индексная адресация.
В данном случае расширенная система команд проектируемого компьютера может быть представлена следующими форматами.

В приведенных форматах команд имеет место следующая интерпретация полей: КОП – поле кода операции базовой команды; mod – модификатор команды, определяющий способ использования регистров общего назначения при адресации ОЗУ; Ri – регистр источник и приемник пересылаемого операнда; Rj и Rx – регистры косвенной адресации. Команды I1-I3 представляют собой команды формата RS, команда I4 – команда формата RX. Для полноты картины набор управляющих слов компьютера дополнен командой I5 формата RR.
Команда деления имеет следующие форматы:

I6

Дм в регистре Ri – Дт в памяти
Дм в регистре Ri – Дт в памяти -
косвенно через Rj
I7

Дт в регистре Ri – Дм в памяти -
автоинкр. через Rj
I8

I9

Дт в регистре Ri – Дм в памяти - баз.-инд. через Rj,Rx
I10
Дм в регистре Ri – Дт в регистре Rj.

Рис. 1.9
Для составления
подмножеств команд суммирования
 ,
вычитания
,
вычитания и умножения
и умножения может быть использована аналогичная
методология, что приводит к образованию
управляющих слов с номерами:I11-I25.
может быть использована аналогичная
методология, что приводит к образованию
управляющих слов с номерами:I11-I25.
Команды перехода
 и
и (I0)
применяемые при вычислении функции
(I0)
применяемые при вычислении функции
 ,
очевидно, являются одноадресными. В
связи с этим нет необходимости включения
в состав команд данной группы поля
первого операнда
,
очевидно, являются одноадресными. В
связи с этим нет необходимости включения
в состав команд данной группы поля
первого операнда ,
а все множество управляющих слов
сократить до трех и представить форматами
вида:
,
а все множество управляющих слов
сократить до трех и представить форматами
вида:
I 0



I 26

«Метка» – прямой адрес
КОП mod Rj


I27
«Метка» в памяти - косвенно через Rj
КОП mod Ri


«Метка» в регистре Ri
I28
Рис. 1.10
Команда Inr представляется одним одноадресным форматом с явным указанием регистра:
КОП mod Ri


I29
операнд в регистре Ri
Рис. 1.11
Кроме использованных в граф-схеме алгоритма (рис. 1.7) команд компьютерные алгоритмы предполагают реализацию процедур ввода-вывода информации в различных формах. При этом могут быть использованы команды с прямой или косвенной адресацией портов, а также с неявной или непосредственной адресацией операндов. В целом учитывая, что ввод-вывод может быть организован как на программном, так и на микропрограммном уровне данный вопрос подробно будет рассмотрен в соответствующем разделе ниже.
При создании системы команд в общем случае следует помнить, что:
1) в системе команд должны быть учтены все управляющие слова основной ГСА, определяющей главные вычислительные алгоритмы пользователя. В реальных спецсистемах эти команды в основном порождаются алгоритмами управления бортовой системой при расчете координат полета или наведении подвижной платформы на цель;
2) система команд должна быть дополнена командами ввода-вывода и командами управления режимами работы компьютера. Порождающей основой здесь являются алгоритмы комплексной обработки входной информации, задачи организации взаимодействия в локальной сети или между подсистемами и механизмами подвижной платформы, задачи визуализации и автоподдержания параметров среды на борту носителя;
3) алгоритмы решения служебных задач могут потребовать применения
специальных команд не использованных выше в п.п. 1-2. При этом базой для создания управляющих слов являются: задачи диспетчеризации и прерывания вычислений, алгоритмы защиты программного обеспечения и исправления ошибок, методы тестирования и контроля работоспособности бортовых систем;
4) система команд может быть дополнена за счет решения специальных задач, к которым относят задачи моделирования процессов передвижения (полета) используемой подвижной платформы, решение задач тактического характера, математическое управление передвижением платформы.