

моп / 35. Метод приведенного градиента
.doc35. Метод приведенного градиента.
Метод приведенного градиента (МПГ) основан на сокращении размерности задачи с помощью представления всех переменных через множество независимых переменных. Впервые его предложил Вульф в (1963) для задач выпуклого программирования с линейными ограничениями. Позднее этот метод был обобщен на случай нелинейных ограничений. Итак, рассмотрим следующую задачу:
минимизировать
![]() (1)
(1)
при условиях
![]() ,
(2)
,
(2)
![]() ,
(3)
,
(3)
где
A -
матрица порядка mn ранга
m;
Am
- m-мерный
вектор, а функция f(x)
непрерывно дифференцируема. Сделаем
следующее предположение о невырожденности
матрицы
![]() :
:
Любые m столбцов A линейно независимы, и каждая крайняя точка допустимой области имеет ровно m положительных переменных и не более чем n-m нулевых компонент.
Пусть x
- допустимая точка. По предположению о
невырожденности матрица A
может быть представлена в виде
![]() , где
, где
![]() -
невырожденная матрица
-
невырожденная матрица
![]() ,
а вектор
,
а вектор
![]() ,
где
,
где
![]() -
базисный вектор, а
-
базисный вектор, а
![]() -
небазисный вектор. Пусть
-
небазисный вектор. Пусть![]() , где
, где
![]() -
градиент функции
-
градиент функции
![]() по
базисным переменным.
по
базисным переменным.
Вспомним, что
направление
![]() является
возможным направлением спуска для
функции
является
возможным направлением спуска для
функции
![]() в
точке
в
точке
![]() ,
если
,
если
![]() и
и
![]() ,
если
,
если
![]() .
.
Определим
возможное направление спуска
![]() в
данной задаче.
в
данной задаче.
Представим вектор
![]() в
виде
в
виде
![]() .
Заметим, что равенство
.
Заметим, что равенство
![]() автоматически
выполняется, если для любого
автоматически
выполняется, если для любого
![]() положить
положить
![]() Обозначим
через
Обозначим
через
rT = [rBT; rNT] = f T - Bf TB-1A = f T - Bf TB-1[B;H] =
= [0..0; Nf T - Bf TB-1N] (4)
приведенный градиент.
Исследуем
![]() :
:
![]() .
(5)
.
(5)
Необходимо
выбрать
![]() так,
чтобы
так,
чтобы
![]() и
и
![]() если
если
![]() .
Введем следующее правило. Для каждой
небазисной компоненты
.
Введем следующее правило. Для каждой
небазисной компоненты
![]() положим
положим
![]() ,
если
,
если
![]() и
возьмем
и
возьмем
![]() ,
если
,
если
![]() .
Это обеспечивает выполнение неравенства
.
Это обеспечивает выполнение неравенства
![]() ,
если
,
если
![]() .
Кроме того,
.
Кроме того,
![]() и
строгое неравенство имеет место при
и
строгое неравенство имеет место при
![]() .
.
Если
![]() ,
то
,
то
![]() -
возможное направление спуска. Кроме
того,
-
возможное направление спуска. Кроме
того,
![]() тогда
и только тогда, когда
тогда
и только тогда, когда
![]() -
точка Куна-Таккера.
-
точка Куна-Таккера.
Алгоритм метода приведенного градиента
Рассмотрим алгоритм
приведенного градиента (ПГ) для решения
задачи (1)-(3). Предполагается, что любые
![]() столбцов
столбцов
![]() линейно
независимы.
линейно
независимы.
Начальный
этап.
Выбрать точку
![]() ,
удовлетворяющую условиям
,
удовлетворяющую условиям
![]() .
Положить
.
Положить
![]() =1
и перейти к основному этапу.
=1
и перейти к основному этапу.
Основной
этап. Первый шаг.
Положить
![]() ,
где
,
где
![]() и
и
![]() получены
по формулам (9) - (10) соответственно. Здесь
получены
по формулам (9) - (10) соответственно. Здесь
![]() -
множество индексов
-
множество индексов
![]() наибольших
компонент вектора
наибольших
компонент вектора
![]() ,
,
![]() (6)
(6)
![]() (7)
(7)
![]() (8)-(9)
(8)-(9)
![]() .
(10)
.
(10)
Если
![]() ,
то остановиться,
,
то остановиться,
![]() -
точка Куна-Таккера. В противном случае
перейти ко второму шагу.
-
точка Куна-Таккера. В противном случае
перейти ко второму шагу.
Второй шаг. Решить следующую задачу одномерной оптимизации:
минимизировать
![]() (11)
(11)
при
условии
![]() ,
,
где
![]() (12)
(12)
Здесь
![]() -
-
![]() -е
компоненты векторов
-е
компоненты векторов
![]() соответственно.
Положить равным
оптимальному и
соответственно.
Положить равным
оптимальному и
![]() .
Заменить k
на k+1
и перейти к первому шагу.
.
Заменить k
на k+1
и перейти к первому шагу.
Метод обобщенного приведенного градиента
Метод обобщенного приведенного градиента (ОПГ) является развитием метода ПГ и его можно использовать для решения задач НП при нелинейных функциях-ограничениях.
Итак, пусть задача НП задана в виде
минимизировать
![]() (13)
(13)
при условиях
![]() ,
(14)
,
(14)
![]() .
(15)
.
(15)
В методе ОПГ также различают две группы переменных:
а)
подмножество базисных переменных
![]() ;
;
б)
подмножество небазисных, или независимых
переменных
![]() .
Примем для простоты обозначений
.
Примем для простоты обозначений
![]() .
При этом зависимые (т.е. базисные)
переменные неявным образом определяются
через независимые (небазисные) переменные.
Следовательно,
.
При этом зависимые (т.е. базисные)
переменные неявным образом определяются
через независимые (небазисные) переменные.
Следовательно,
![]() -
функция
-
функция
![]() независимых
переменных. Введем следующие обозначения:
независимых
переменных. Введем следующие обозначения:
 (16)
(16)

Основная идея метода ОПГ состоит, как и в линейном случае, в том, чтобы сократить размерность задачи путем исключения зависимых (базисных) переменных и применить метод ПГ для определения направления спуска и в качестве критерия при установлении оптимальности.
Укажем способ
вычисления обобщенного ПГ. Для этого
рассмотрим задачу (13)-(15) и выразим
обобщенный ПГ через компоненты градиента
![]() и
якобиан для ограничений-равенств (14)
и
якобиан для ограничений-равенств (14)
![]() .
(17)
.
(17)
Исключим
из (17) матрицу
![]() .
Для этого воспользуемся соотношением
.
Для этого воспользуемся соотношением
![]() ,
(18)
,
(18)
откуда
![]() .
(19)
.
(19)
Подставляя (19) в (17), получим выражение для ОПГ, с учетом (16);
![]() ;
(20)
;
(20)
Нетрудно увидеть
аналогию между выражением (20) и соотношением
(4) для ПГ в линейном
случае. Действительно, если учесть,
что
![]() ,
то
,
то
![]() .
Подставив их в (20), получим полное
совпадение выражений (20) и (4).
.
Подставив их в (20), получим полное
совпадение выражений (20) и (4).
Алгоритм метода
ОПГ начинает работать с допустимой
точки
![]() .
Если же относительно условий задачи
.
Если же относительно условий задачи
![]() не
является допустимым, то необходимо
ввести искусственные переменные,
значения которых постепенно сводят к
нулю путем введения в целевую функцию
штрафного члена.
не
является допустимым, то необходимо
ввести искусственные переменные,
значения которых постепенно сводят к
нулю путем введения в целевую функцию
штрафного члена.
Если
ОПГ ни на одном из этапов вычислительной
процедуры не становится равным нулю,
то заменяем текущий вектор
![]() на
на
![]() по
общей формуле
по
общей формуле
![]() ,
(21)
,
(21)
![]() -
определяется путем решения задачи:
-
определяется путем решения задачи:
минимизировать
![]() при условиях
при условиях
![]() .
.
где
![]() -
направление оптимизационного поиска
на k-й
итерации.
-
направление оптимизационного поиска
на k-й
итерации.
Рассмотрим
способ определения величин
![]() для
независимых переменных
для
независимых переменных
![]() .
Направления поиска
.
Направления поиска
![]() для
них определяют следующим способом:
для
них определяют следующим способом:
![]() ,
если
,
если
![]() ;
(22)
;
(22)
![]() ,
если
,
если
![]() ;
(23)
;
(23)
или
![]() , где
, где
![]() -
вектор ОПГ.
-
вектор ОПГ.
Если
ограничения
![]() линейны,
то метод совпадает с методом Вульфа.
линейны,
то метод совпадает с методом Вульфа.
Пример
1. Минимизировать
![]() при
условии
при
условии ![]() .
.
Пусть
![]() -
независимая (небазисная) переменная, а
-
независимая (небазисная) переменная, а
![]() -
зависимая. Найдем величины
-
зависимая. Найдем величины
![]()
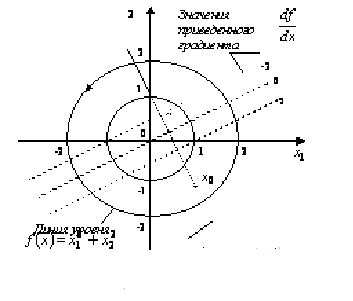
Рисунок 1
Согласно формуле (20) получим следующее выражение для ОПГ:
![]()
Итак,
двигаясь из любой допустимой точки
вдоль ограничения
![]() до
тех пор, пока
до
тех пор, пока
![]() не
станет равным нулю, выполняем минимизацию
f
(x)
( рис.1).
не
станет равным нулю, выполняем минимизацию
f
(x)
( рис.1).