

Реактивную энергию измеряют специальными индукционными счетчиками реактивной энергии.
5.4. Мостовые и компенсационные методы измерений
Мостовые и компенсационные методы измерения относятся к методам сравнения. В этих методах измеряемая величина сравнивается с образцовой мерой. Техника измерения сложнее, чем с помощью приборов прямых измерений, но точность значительно выше.
5.4.1. Мостовые методы измерения
Измерительный мост – устройство, позволяющее измерить параметры резисторов, катушек индуктивности и конденсаторов. Для измерения параметров катушек индуктивности и конденсаторов применяются мосты переменного тока. Для измерения сопротивлений резисторов применяются мосты постоянного тока (рис. 45).
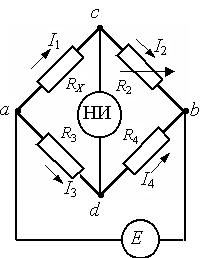
Рис. 45
Измерительный мост имеет четыре плеча и две диагонали; в диагональ сd включен нуль-индикатор (НИ – гальванометр постоянного тока), а в диагональ ab – источник ЭДС (E).
В плечи моста включены: Rx = R1 – неизвестное сопротивление; R3, R4 – плечи отношения; R2 – плечо сравнения – регулируемый резистор.
63
Равновесия моста добиваются путем регулирования сопротивления резистора R2 так, чтобы показания HИ были бы равны нулю т. е. Iни = 0, это значит, что потенциал точки с равен потенциалу точки d
( с = d), тогда ток I1 равен току I2 (I1 = I2), а ток I3 равен току I4 (I3 = I4). Учитывая вышесказанное, по II закону Кирхгофа для левого и
правого контура можно записать
Rx I1 = R3 I3,
R2 I2 = R4 I4.
Если разделить почленно верхнее уравнение на нижнее и учесть равенство токов, то получим
Rx |
|
R3 |
откуда |
Rx R4 R3 R2 . |
R2 |
|
R4 |
||
|
|
|
Вышеуказанное уравнение является условием равновесия моста:
произведения сопротивлений противоположных плеч равны между собой.
Отсюда находится неизвестное сопротивление, которое равно:
Rx R2 R3 .
R4
Кроме уравновешенных мостов существуют неуравновешенные мосты, в которых процесс уравновешивания не доводится до конца и на диагонали моста cd остается напряжение Ucd, фиксируемое выходным прибором, по показаниям которого судят о значении измеряемого сопротивления или связанной с ним неэлектрической величины.
5.4.2. Понятие о мостах переменного тока
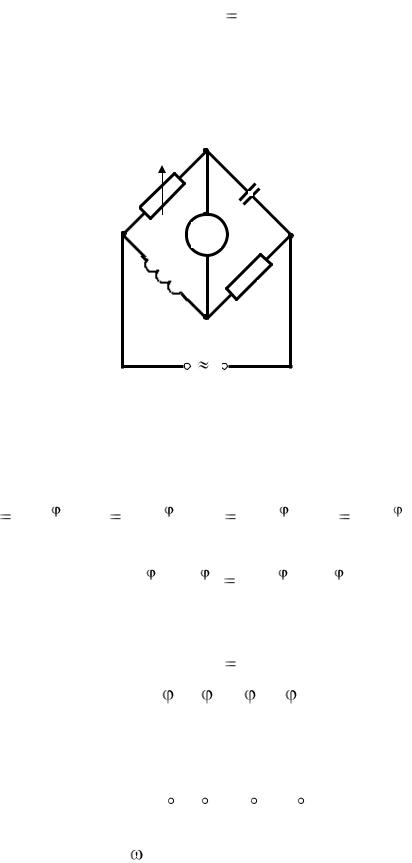
Мосты переменного тока (рис. 46) применяются для измерения индуктивностей, емкостей и взаимной индуктивности.
В общем случае уравнение равновесия моста можно представить в виде
64
Z 1 Z 2 Z 3 Z 4 ,
т. е. так же, как в мостах постоянного тока, в мостах переменного тока произведение сопротивлений противоположных плеч равны между собой.
c
R1 |
|
-j xc |
|
|
|
Z1 |
|
Z 3 |
a |
НИ |
b |
j xL |
|
R2 |
Z 2 |
d |
Z 4 |
|
||
|
|
Рис. 46
Поскольку сопротивления моста переменного тока выражаются в комплексном виде
( Z |
1` |
Z e j 1 ; Z |
2 |
Z |
2 |
e j |
2 ; Z |
3 |
Z |
3 |
e j |
3 ; Z |
4 |
Z |
4 |
e j |
4 ), |
||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
условие |
равновесия моста записывается следующим образом |
||||||||||||||||||||
|
|
|
|
|
Z e j |
1 Z |
4 |
e j |
4 |
Z |
2 |
e j |
2 Z |
3 |
e j |
3 . |
|
|
|
||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Тогда получаем два условия равновесия моста
Z1Z4 Z2 Z3 ;
1  4
4  2
2  3
3
Для конкретной схемы (рис. 46) – условие равновесия моста
R 1R 2 = x L x C, |
|
|
|||
0 + 0 = 90 |
– 90 . |
|
|
||
Учитывая, что xL = L и xC = |
1 |
, получим |
L |
= R2C. |
|
ω C |
R |
||||
|
|
|
|||
|
|
|
1 |
|
|
65
Таким образом, при помощи моста переменного тока можно измерять параметры индуктивного или емкостного элемента, если параметры других элементов моста известны.
Для повышения производительности и точности измерений применяются мосты с встроенной микропроцессорной системой.
Нажатием соответствующих клавиш на панели управления задают вид измеряемого параметра, значение частоты напряжения генератора и форму представления результата.
Микропроцессор по команде с панели управления включает генератор и считывает программу из постоянного запоминающего устройства, определяющую последовательность операций. Переменное напряжение разбаланса моста преобразуется в постоянное напряжение, а затем с помощью аналого-цифрового преобразователя
– в числовой эквивалент, с помощью которого микропроцессор регулирует цепь моста до состояния равновесия.
При достижении равновесия моста микропроцессорная система выполняет необходимые вычисления для получения результата измерения, преобразует его и выводит на дисплей в требуемой форме.
5.4.3. Компенсационные методы измерения
Компенсационный метод измерения положен в основу приборов сравнения второй группы – потенциометров. Основное назначение компенсационного метода – измерение малых ЭДС, (например,
ЭДС термопары) и градуировка электроизмерительных приборов.
Сущность метода состоит в сравнении неизвестной ЭДС или напряжения с известным, взятым за образец.
В основном для измерения малых ЭДС или напряжений применяются потенциометры постоянного тока. Потенциометры переменного тока применяются для измерения магнитных величин.
Простейшая схема потенциометра постоянного тока показана на рис. 47.
Контур I называется цепью рабочего тока. Контуры II и III пред-
ставляют собой измерительную цепь.
66
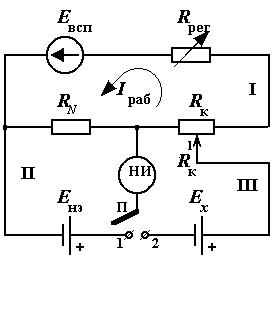
Рис. 47
В контур I входят:
–Eвсп – вспомогательная батарея;
–Rрег – регулировочный резистор;
–образцовый резистор RN с точным значением сопротивления, который выбирается в зависимости от значения рабочего тока;
–компенсирующий резистор RК с точно известным регулируемым сопротивлением.
В контуры II и III входят:
–Енэ – нормальный элемент, ЭДС которого известна с большой точностью;
–Еx – неизвестная ЭДС;
–НИ – нуль-индикатор.
Первый этап измерения – калибровка потенциометра, т. е. установка рабочего тока. Для этого переключатель П устанавливается в положение 1. С помощью резистора Rрег регулируем рабочий
ток Iраб до тех пор, пока нуль-индикатор не покажет 0, т. е. ток через НИ проходить не будет (Iни = 0). Это означает, что ЭДС нормального
элемента (в контуре II ) уравновешивается падением напряжения на
образцовом резисторе RN , т. е. I раб RN = Eнэ, отсюда
Iраб = Eнэ / RN .
67

Второй этап – собственно измерение ЭДС (переключатель П устанавливается в положение 2). Изменением компенсирующего резистора RК добиваемся того, чтобы ток через НИ опять стал равным нулю. Это значит, что ЭДС Еx уравновешивается падением напряже-
ния на части компенсирующего резистора – RК1 , т. е.:
Iраб RК1 = Ex.
Подставив в последнее выражение уже определенное ранее значение рабочего тока (Iраб), получим значение неизвестной ЭДС
EEнэ R1 .
xRN К
Точность измерения Ex определяется:
–чувствительностью нуль-индикатора НИ;
–неизменностью рабочего тока Iраб, т. е. стабильностью Eвсп ;
–точностью изготовления резисторов RN и RК (последний выполняется в виде высокостабильных многодекадных магазинов сопротивлений).
Выпускаемые потенциометры имеют классы точности 0,005–0,5. Однако максимальное напряжение, которое может быть измерено потенциометрами постоянного тока – не более 2 В.
Важным преимуществом компенсационного метода является возможность измерять (или использовать для управления) ЭДС объектов малой мощности. Существуют схемы компенсационного метода градуировки амперметра и вольтметра. Если установить положение движка потенциометра так, чтобы ток нормального элемента равнялся нулю, то зная сопротивление потенциометра, можно получить соответствие между отклонениями стрелок амперметра и вольтметра и значениями измеренных токов. Изменяя сопротивления регулируемых резисторов в цепях амперметра и вольтметра, можно проградуировать шкалы этих приборов.
Достоинства компенсационных методов измерения:
–высокая точность измерения, так как величины ЕНЭ, RN имеют весьма точные значения;– компенсационная измерительная цепь работает без отбора энергии от объекта измерения, так как I НЭ = 0;
68