Ответы на вопросы к экзамену / 16 Устройства 3D-позиционирования
.docx16. Устройства 3D-позиционирования.
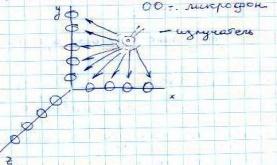
Простой способ позиционир-я с помощью звукового излучателя и ортогональных линеек микрофонов.
Позиционирование объектов в 3-х мерном простр-ве с помощью бинокулярного машинного зрения.
Метод основан на явлении бинокулярного параллакса.
Системы, основанные на явлении параллакса можно достаточно точно откалибровать, выбрав объект, расположенный на максимальном удалении, для которого паралласс пренебрежимо мал. Затем одна из камер совмещает выбранный удалённый объект с оптической осью, а др. камера измеряет угловое отклонение проекции этого объекта относительно проекции фона. Величина углового отклонения тем больше, чем ближе объект.
Для практического использ-я указательного явления требуется решать попутно возникающую задачу установления соответствия участков, смещённых на различных снимках, однаако, факт-ки являющихся одним и тем же участком объекта.
Применяются 2 группы методов:
1) корелляционный – выбор (ппроизвольный или обоснованный) некоторого участка на одном кадре стереопары и дальнейший поиск участка такого же размера на другом кадре стереопары, причём должен максимизироваться коэффициент корелляции между соответствующими данными о яркости. В простейшем случае можно минимизировать квадрат разности между яркостью одного и др. участка по всем его пикселям;
2) основанный на ключевых точках – может определить координату глубины не для всех пикселей, а только тех, окрестности которых обладают характ-ми особенностями, инвариантными к параллапсу и поэтому одинаково проявляющимися на обоих кадрах стереопары. Примеры хар-ных ключевых точек: углы, пересечения линий, уникальные сочетания цветов;
Не во всех практических задачах требуется строить плотное поле машин координат, хотя в принципе человеческое зрение это позволяет. В задачах захвата движения требуется позиционировать только ограниченное подмножеством точек объекта. В этом случае с каждой из таких точек ассоц-ся спец-й маркер, и позиц-е выполняется только для этих маркеров.
Основная техническая трудность заключается в том, чтобы сделать маркеры уникально идентифицированными в оптическом пространстве. Один из эффективных способов заключается в импульсной модуляции света маркеров и съёмки с повышенной частотой кадра.
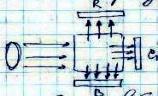
специальной системы призм и зеркал, покрытых светофильтрами, разделяется на 3 цветных потока, каждый из которых поступает на свою матрицу.
Отсутствие необходимости в байеровском шаблоне позволяет 3-х матричным системам лучше передавать цвет, но не яркость.
Функции процессора камеры: в автоматизации поиска оптимальных режимов съёмки в данных условиях, а именно определение времени экспозиции кадра, величины отверстия диафрагмы и фокусного расстояния объектива.
В силу большого кол-ва ф-й, ыозможен на процессор камеры, эти устройства являются как правила ноу-хау производителя и могут являться отдельным маркетинговым производителя.