

§9. Скалярное произведение векторов.
Вернемся в обычное
векторное пространство геометрических
векторов.
Имеются два вектора a и b. Угол между ними – это наименьший из двух углов (для векторов, приведённых в одно начало) обозначают = (a ^ b) 0 (см. рис 18)
Если =/2, то такие вектора называются ортогональными.
Определение: Скалярным произведением двух векторов называется число, равное произведению длин этих векторов на косинус угла между ними.
Обозначается скалярное произведение (a , b)
Итак (a , b) = | a || b |cos , где = (a ^ b)
Очевидны свойства скалярного произведения:
(a,b) = (b,a) (коммутативность)
(a , a) = |a|2 для любого a.
Скалярное произведение двух векторов равно 0 тогда и только тогда, когда сомножители ортогональны или хоть один из них равен 0.
Для любых векторов a, bиcи любых чисел α и β выполнимо равенство:
(αa + βb, c) = α(a , c) + β(b , c).
В частности (αa , c) = α(a , c); (a+b,c) = (a,c) + (b,c).
(без доказательства)
Пользуясь свойством 4, найдем выражение скалярного произведения двух векторов.
a= {α1, α2, α3} иb = { β1, β2, β3} в базисеe1,e2,e3.
(a,b) = ({α1e1 + α2e2+ α3e3} , { β1e1+ β2e2+ β3e3} ) =
= α1β1 (e1, e1) + α2β2 (e2, e2) + α3β3 (e3, e3) +
+ ( α1β2 + α2β1)(e1, e2) + ( α1β3 + α3β1)(e1, e3) + (1)
+ ( α2β3 + α3β2)(e2, e3).
Определение:Базис называетсяортонормированным, если его векторы попарно перпендикулярны, и их длины равны 1.
Тогда (e1, e1) = (e2, e2) = (e3, e3) = 1.
и (e1, e2) = (e1, e3) = (e2, e3) = 0. (2)
Теорема: Если базис ортонормированный, то скалярное произведение векторов выражается через их компоненты по формуле:
(a , b) = α1 β1 + α2 β2 + α3 β3 . (3)
Доказательство: подставим (2) в (1)
Эта теорема позволяет написать выражение длины вектора через его компоненты (координаты) в ортонормированном базисе.
![]() (4)
(4)
И выражение угла между векторами через их компоненты в ортонормированном базисе.
 (5)
(5)
Определение:Декартова система координат, базис которой ортонормирован, называетсядекартовой прямоугольной системой координат.
Ортонормированный
базис декартовой прямоугольной системы
в трёхмерном линейном пространстве
геометрических векторов обозначается
обычно i,j,k. Оси координат
обозначаютOX,OY,OZи называют соответственно
ось абсцисс, ось ординат, и ось аппликат
(см. рис.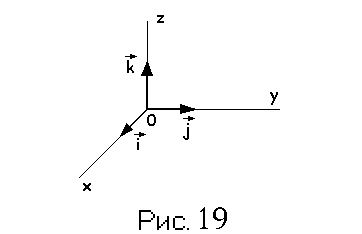 19). Прямоугольные декартовы координаты
векторов и точек обозначают буквамиx,y,z(В отличии
от произвольных декартовых координат)
19). Прямоугольные декартовы координаты
векторов и точек обозначают буквамиx,y,z(В отличии
от произвольных декартовых координат)
a = {x, y, z} и M(x, y, z)
Д екартовы
прямоугольные координаты очень широко
применяются в задачах, связанных со
скалярным произведением. Легко проверить
(самостоятельно), что координаты точки
в декартовой прямоугольной системе
равны по абсолютной величине расстояниям
до соответствующих координатных
плоскостей. Они имеют знак “+” или “–”
в зависимости от того, лежит ли точка и
базисный вектор, перпендикулярный этой
плоскости, по одну сторону или по разные
стороны от этой плоскости. На плоскости
все аналогично, но более наглядно.
Рассмотрим подробнее. (Рис 20)
екартовы
прямоугольные координаты очень широко
применяются в задачах, связанных со
скалярным произведением. Легко проверить
(самостоятельно), что координаты точки
в декартовой прямоугольной системе
равны по абсолютной величине расстояниям
до соответствующих координатных
плоскостей. Они имеют знак “+” или “–”
в зависимости от того, лежит ли точка и
базисный вектор, перпендикулярный этой
плоскости, по одну сторону или по разные
стороны от этой плоскости. На плоскости
все аналогично, но более наглядно.
Рассмотрим подробнее. (Рис 20)
Пусть M(x,y) – точка на плоскости. Её радиус векторOM= {x,y},
Т.е. OM=xi+yj. С другой стороныOM = OMx + OMy
Отсюда xi=OMxx=|OMx| / |i| =|OMx|
(“+” – если OMxиiнаправлены одинаково, “–” – если в противоположенные стороны).
Аналогично y=|OMy|, ноOMx = |OM|Cos(α) = прoxOM,
Т.е x= |OM|Cos(α) = прoxOM.
Аналогично OMy= |OM|cos(β) = прoyOM,
Т.е. y= |OM|Cos(β) = прoyOM.
Углы α и β называются направляющими угламивектораOM, а их косинусы –направляющими косинусами. Из выше сказанного следует:
Cos(α) =x/ |OM|;Cos(β) =y/ |OM|
Формулы для направляющих косинусов остаются в силе и в пространстве и для произвольно расположенного вектора a= {x,y,z}:
Cos(α) =x/ |OM|;Cos(β) =y/ |OM|Cos() =z/ |OM|
Из формулы (4.8)
следует, что расстояние между двумя
точками A (x1, y1, z1)
иB(x2, y2, z2)
в декартовой прямоугольной системе
вычисляется по формуле:![]()