

§4. Свойства линейных операций.
Отметим восемь основных свойств линейных операций над векторами:
a+b=b+a (коммутативность сложения или переместительность)
a+(b+c)=(a+b)+c (ассоциативность сложения или сочетательность)
a+0=a.
Для любого вектора a существует ему противоположенный вектор –a, так что a+(–a)=0
1a=a
m(na)=(mn)a (ассоциативность умножения на скаляр)
m(a+b)=ma+mb (распределительные свойства относи-
(m+n)a=ma+na тельно умножения на скаляр)
Справедливость свойств 3–5 для геометрических векторов очевидны. Справедливость свойств 1 и 2 следует из самого определения суммы двух векторов. (диагональ параллелограмма одна и та же для a+b и для b+a) (Рис. 11)


Свойство 6 и 8 следует из истолкования умножения вектора на скаляр m как "растяжения" его в |m| раз с возможным изменением направления на противоположенное. Свойство 7 следует из подобия треугольников. (Рис. 12)



§5. Разложение вектора по базису. Координаты вектора.
Рассмотрим систему n векторов а1,а2,а3,…,аn. Каждый вектор вида α1а1+α2а2+α3а3+…+αnаn , где α1, α2, α3,…, αn некоторые действительные числа, называется линейной комбинацией данных векторов, числа α1, α2, α3,…, αn называются коэффициентами этой линейной комбинации. Линейная комбинация называется нетривиальной, если хотя бы один коэффициент αк 0 (в противном случае она называется тривиальной).
Если
некоторый вектор d
представить в виде определённой
комбинации данных векторов.
d=α1а1+α2а2+α3а3+…+αnаn
то говорят, что вектор d
разложен по
системе векторов
![]() .
.
Теорема 1. Если e1 и e2 два неколлинеарных вектора, то всякий компланарный с ними третий вектор d раскладывается по ним и это разложение единственно.
Теорема
2. Если
e1,e2,e3
три некомпланарные вектора, то всякий
четвертый ве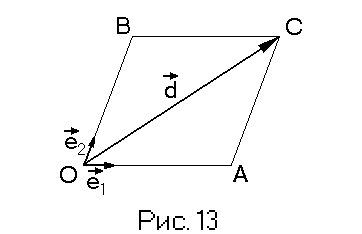 кторd
раскладывается по ним и это разложение
единственно.
кторd
раскладывается по ним и это разложение
единственно.
Доказательство теорем совершенно аналогично. Для краткости докажем теорему 1. Приведем вектора e1, e2 и d в одно начало О и построим параллелограмм, стороны которого лежат на векторах e1, e2, а вектор d является его диагональю. (Рис. 13)
Очевидно d=OC=OA+OB. Но OA || e1 => OA=me1, OB || e2 => OB=ne1. Тогда d=me1+ne2 – разложение получено и оно единственно, т.к. n и m определяются однозначно.
Определение: Любые два неколлинеарных упорядоченных (взятых в определенном порядке) вектора на плоскости называются базисом на этой плоскости.
Любые три некомпланарные упорядоченные вектора в пространстве называются базисом в пространстве.
Из сказанного выше следует (например, в пространстве), что задание базиса однозначно сопоставляет каждому вектору d тройку чисел {α, β, γ} – его коэффициенты разложения по этому базису, и наоборот: каждой упорядоченной тройке чисел {α, β, γ} при помощи базиса сопоставляется вполне определённый вектор d=αe1+βe2+γe3 .
По этому введём:
Определение: Если вектора e1,e2,e3 – базис и вектор а=αe1+βe2+γe3 , то числа α, β, γ называются координатами (компонентами) вектора а в этом базисе.
Символически будем писать вектор а={α, β, γ}(e1,e2,e3) или просто а={α, β, γ}.
Теорема 3. Над координатами векторов производятся те же линейные операции, что и над самими векторами.
Доказательство:
Пусть вектор а={α, β, γ}(e1,e2,e3). Это означает а=αe1+βe2+γe3.
Но тогда m а=m(αe1+βe2+γe3) = (mα)e1+(mβ)e2+(mγ)e3
Откуда следует, что вектор mа={mα, mβ, mγ}(e1,e2,e3)
Пусть вектор b={α1, β1, γ1} тогда
ab = (αe1+βe2+γe3) (α1e1+β1e2+γ1e3) =
= (αα1)e1+(ββ1)e2+(γγ1)e3
отсюда следует, что ab = {αα1, ββ1, γγ1}.