

ТММ печать
.docx

 Структурный
анализ механизма
Структурный
анализ механизма
Исходные данные:
Длины звеньев: O1A = 100 мм; BC = 250 мм; y = 120 мм; O1O2 = 250 мм;
O2B = 350 мм;
Частота вращения кривошипа: nкр= 60 мин -1;
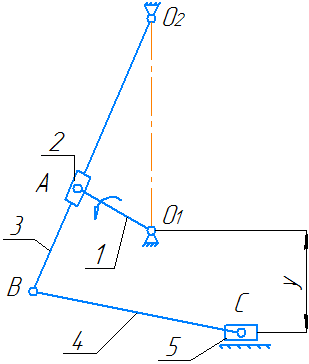
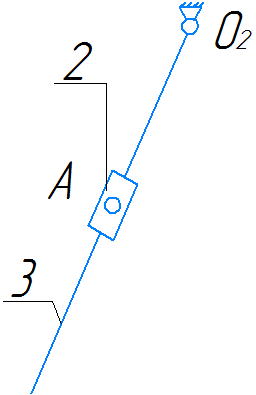
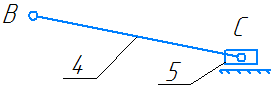
Рисунок 1 – Структурная схема механизма
-
Определение количества звеньев и кинематических пар
В данном механизме пять подвижных звеньев:
1 – кривошип, вращательное движение;
2 – кулисный камень, сложное движение;
3 – кулиса, вращательное движение;
4 – шатун, сложное движение;
5 – ползун, поступательное движение.
В данном механизме семь одноподвижных кинематических пар: O1(0;1) - вращательная; O2(0;3) - вращательная; A (1;2) - вращательная; A′ (2,3) – поступательная; B (3;4) - вращательная; С (4,5) – вращательная; C′ (5,0) – поступательная.
-

 Степень
подвижности механизма
Степень
подвижности механизма
Определяем число степеней свободы данного механизма:
𝑊 = 3 ∙ n – 2 ∙ 𝑝1 – 𝑝2 = 3 ∙ 5 – 2 ∙ 7 – 0 = 1,
Где n – число подвижных звеньев, n = 5;
p1 – число одноподвижных кинематических пар, p1 = 7;
p2 – число двух подвижных кинематических пар, p2 = 0.
-
Разложение механизма на структурные группы Ассура и определение их класса и порядка
Кривошип (0,1) – механизм 1 – ого класса, 𝑊 = 1.
Диада (2,3) – механизм 2 – ого класса, 2 – ого порядка, 𝑊 = 0.



Диада (4,5) – механизм 2 – ого класса, 2 – ого порядка, 𝑊 = 0.
-
Записываем формулу строения механизма и определяем класс и порядок всего механизма
Формула строения механизма: I (0,1) → д. (2,3) II,2 → д. (4,5) II,2.
Механизм II класса, 2 порядка.
-
Вычерчиваем кинематическую схему механизма
Масштабный коэффициент длин К1:
К1 = 0
-
Определение скоростей механизма
Частота вращения кривошипа: nкр = 60 мин -1.
Угловая скорость кривошипа:
ω1 =
 =
=
 = 6,28
= 6,28
 ,
,
где ω1 –
угловая скорость кривошипа,
 .
.
Скорость точки А:
vA = ω1
⋅
 = 6,28 ⋅ 0,1 = 0,628
= 6,28 ⋅ 0,1 = 0,628
 .
.
Скорость точки А кривошипа изображаем на плане в виде отрезка Pva = 62,8 мм. В таком случае, масштабный коэффициент плана скоростей:
Kv
=
 =
=
 = 0,01
= 0,01

Чтобы определить скорость точки A′, составим два векторных уравнения её движения:
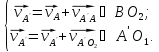
Решаем графически эту систему и определяем
скорость точки
 для данного положения механизма из
плана. Значения скорости из плана
скоростей:
для данного положения механизма из
плана. Значения скорости из плана
скоростей:


Скорость точки B определяем по свойству подобия:


 Значения скорости точки B
из плана скоростей:
Значения скорости точки B
из плана скоростей:

Чтобы определить скорость точки C, составим два векторных уравнения её движения:
Решаем графически эту систему, определяем скорость точки C из плана скоростей:


Угловые скорости:
7. Определение ускорений механизма
Планы ускорений строим, начиная с кривошипа. Кривошип свершает равномерное вращательное движение, поэтому:

Ускорение
 изображаем отрезком
изображаем отрезком
 направленным параллельно O1A,
тогда масштабный коэффициент построения
плана ускорений:
направленным параллельно O1A,
тогда масштабный коэффициент построения
плана ускорений:
Ускорение точек О1 и А известны. Чтобы определить ускорение точки A′, составим два векторных уравнения её движения:
Определим величину относительно
нормального ускорения

На плане ускорений
 изображаем отрезком, направленным
параллельно BО2 к
центру его вращения:
изображаем отрезком, направленным
параллельно BО2 к
центру его вращения:
Определим величину относительно
Кориолисового ускорения


На плане ускорений
 изображаем отрезком, направленным
перпендикулярно BО2
в сторону вращения кулисы:
изображаем отрезком, направленным
перпендикулярно BО2
в сторону вращения кулисы:
Решая систему уравнений, графически определяем ускорение точки A′ для заданного положения механизма:

Ускорение точки B определяем по свойству подобия:



Ускорение точки B из плана ускорений:

Чтобы определить ускорение точки A′, составим два векторных уравнения её движения:
Определим величину относительно
нормального ускорения

На плане ускорений
 изображаем отрезком, направленным
параллельно BC в сторону
вращения кулисы:
изображаем отрезком, направленным
параллельно BC в сторону
вращения кулисы:
Решая систему уравнений, графически определяем ускорение точки C для заданного положения механизма:


 Угловые
ускорения:
Угловые
ускорения:

