

КП / СКРЕПЛЁННЫй
.docxФедеральное агентство по образованию
ГОУ ВПО «ОМСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра «Системы автоматизированного проектирования»
Курсовой проект
по дисциплине «Основы теории управления»
Вариант 18
Тема: Расчёт систем управления
Принял:
Суриков Р.
_______________________________ подпись, дата
Выполнил:
студент гр. ИВТ-338 Д.В. Визигин
_______________________________
подпись, дата
Омск 2010
Задание на курсовой проект
Вариант 18

Рис. 1. Схема системы управления
Характеристики:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
Найти передаточную функцию разомкнутой системы W(p).
Найти передаточную функцию замкнутой системы Ф(p).
Найти передаточную функцию ошибки Wx(p).
Записать дифференциальное уравнение замкнутой системы.
Записать характеристическое уравнение замкнутой системы.
Записать дифференциальное уравнение для ошибки.
Найти первые два коэффициента ошибки с0 и с1.
Пользуясь структурным методом моделирования, составить схему САУ на ПК, рассчитать значения резисторов и кондсаторов модели
Выбрать параметры корректирующего устройства, обеспечивающие минимум интегральной оценки.
Содержание
Введение 4
Передаточные функции системы 5
Дифференциальные уравнения системы 6
Расчёт коэфициентов, резисторов и конденсаторов модели и схема моелирования САУ на ПК 8
Выбор параметров корректирующего устройства 11
Переходный процесс для выбранных параметров 12
Введение
Для роста производительности труда, увеличения количества и улучшения качества выпускаемой продукции приобрело популярность широкое внедрение автоматики и вычислительной техники в производственных процессах. С помощью этих систем осуществляется механизация трудоёмких работ, снижается себестоимость продукции.
Теория автоматического управления и регулирования – это наука, которая изучает процессы управления, методы их исследования и основы проектирования автоматических систем, работающих по замкнутому циклу, в любой области техники.
Системы, которые обеспечивают весь комплекс возможных операций по управлению любым технически, в том числе производственным, процессом без непосредственного участия человека называют системой автоматического управления. Автоматическое обеспечение заданных значений параметров, определяющих требуемое протекание управляемого процесса, называется автоматическим регулированием, а системы, выполняющие эту функцию – системы автоматического регулирования.
Системы автоматического регулирования представляют собой совокупность связанных между собой элементов. Элементы, выполняющие основные функции, называются основными (функциональными). Остальные элементы называются вспомогательными.
Элемент представляет собой конструктивно обособленную часть схемы или системы, выполняющую определённую функцию. Элементом может быть, например, резистор, конденсатор трансформатор, муфта и т. д. Элементы могут отличаться друг от друга физической природой, принципом действия, схемой включения, конструкцией, статической характеристикой и т. д.
По выполняемым функциям все элементы автоматики можно разделить на датчики, усилители, двигатели, муфты, генераторы, стабилизаторы, реле, контакторы, магнитные пускатели и т.д.
В разных системах автоматики выполняется очень большое число основных функций. Но общим для основных (функциональных) элементов автоматики является передача поступающих на них сигналов в определённом направлении, преобразование сигнала по значению, характеру и физической природе.
Передаточные функции системы
Так
как в данной системе возмущаещее
воздействие
 ,
мы можем рассчитать только главную
передаточную функцию и передаточную
функцию замкнутой системы для ошибки.
Для этого необходимо преобразовать
структурную схему и получить
,
мы можем рассчитать только главную
передаточную функцию и передаточную
функцию замкнутой системы для ошибки.
Для этого необходимо преобразовать
структурную схему и получить
 .
.

Рис.2. Звено, охваченное отрицательной обратной связью
Для
того чтобы получить
 в данной системе нужно рассмотреть все
звенья цепи. Во первых нужно преобразовать
звено, охваченное обратной связью,
которое выделенно на рисунке 2 и привести
его к виду:
в данной системе нужно рассмотреть все
звенья цепи. Во первых нужно преобразовать
звено, охваченное обратной связью,
которое выделенно на рисунке 2 и привести
его к виду:

Затем, достаточно перемножить все остальные звенья цепи так как они охвачены последовательным соединением и передаточная функция разомкнутой системы в итоге примет вид:
 ,
где
,
где

Главная передаточная функция замкнутой системы в данном случае будет равна:
 ;
;
 ;
;
Передаточная функция замкнутой системы по ошибке будет равна:


Дифференциальные уравнения системы
Для рассчёта коэфициентов модели необходимо изучить все дифференциальные уравнения системы:
-
Дифференциальное уравнение замкнутой системы:


-
Характеристическое уравнение замкнутой системы:
Для получения характеристического уравнения замкнутой системы, необходимо сложить числитель и знаменатель передаточной функции разомкнутой системы и приравнять к нулю.

-
Дифференциальное уравнение ошибки:


-
Первые два коэффициента ошибки с0 и с1:
 Разделим
числитель на знаменатель(для упрощения
процесса деления произведем замены:
Разделим
числитель на знаменатель(для упрощения
процесса деления произведем замены:
 ,
,
где


Проведя
деление получаем, сопоставив с рядом
 ,
,


Расчет коэффициентов, резисторов и конденсаторов модели и схема для моделирования САУ на ПК

1.
Элемент сравнения сигнала
может быть представлен в виде:
R3
x1
R1
-x3
-x2 R2
Так как не нужно использовать коэффициенты усиления сигналов, то значения R1,R2,R3 будут равны 1 МОм.
2.
Модель инерционного звена: 
С
R2
R1

Для инерционного звена задаем значение R1=1 МОм, тогда
R2=R1k1=10 МОм. С=T1/R2=0,2/10=0,02 мкФ.
3.Идеальное
интегрирующее звено: 
C

R
В первом случае значение k2=5. Задаем значение R=1 МОм, тогда C=1/kR=0,2мкФ.
Во втором случае значение k4=2. Задаем значение R=1 МОм, тогда C=1/kR=0,5мкФ
4. Для реализации коэффициента усиления k3=0,2 используем масштабные операционные усилители:
R2


x1 R1 x2
Значение R1 задается равным 1 МОм, тогда R2=kR1=0,2 МОм
5. В приведённой схеме также используется звено характеристики, которого необходимо найти, это интегро-дифференциирующее звено
Передаточная функция данного звена:

Типовая
схема: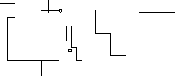
С учетом полученных расчетов схема для моделирования САУ на ПК имеет вид:

Выбор параметров корректирующего устройства
Зададим T3=2 c и выберем T2, исходя из минимума интегральной оценки.
|
T |
I(k) |
|
0.1 |
100 |
|
0.5 |
50 |
|
1 |
2 |
|
1.5 |
1.85 |
|
1.9 |
1.7 |
|
2 |
1.5 |
|
3 |
1.8 |

Исходя из полученного зададим T2=2 c и выберем T3, исходя из минимума интегральной оценки.
|
T |
I(k) |
|
1 |
100 |
|
2 |
50 |
|
4 |
2 |
|
6 |
1.85 |
T3 =2c

Переходный процесс для выбранных параметров

Качественный
показатель переходного процесса

