

Курсовые проекты ОТУ / фин2
.docФедеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
“ОМСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ”
Кафедра «Информатики и Вычислительной техники»
КУРСОВОЙ ПРОЕКТ
по дисциплине «Основы теории управления»
Выполнил:
студент гр. ИВТ-254 В.В. Зобнин
подпись, дата
Проверил:
доцент В.А. Юдин
подпись, дата
Омск 2005
Содержание
Задание 4
1 Передаточная функция разомкнутой системы W(p): 5
2 Передаточная функция замкнутой системы Ф(p): 5
3 Передаточная функция ошибки системы Wx(p): 6
4 Дифференциальное уравнение замкнутой системы: 6
5 Характеристическое уравнение замкнутой системы: 6
6 Дифференциальное уравнение для ошибки: 7
7 Найдем первые два коэффициента ошибки: 7
8 Составим схему для моделирования САУ, пользуясь структурным методом: 9
8.1 Рассмотрим инерционные звенья с передаточными функциями 9
8.2 Рассмотрим колебательное звено с передаточной функцией 9
8.3 Рассмотрим идеальное интегрирующее звено с передаточной функцией 10
8.4 Рассмотрим реальное дифференцирующее звено с передаточной функцией 10
9 Выберем параметры корректирующего устройства, обеспечивающие минимум интегральной оценки: 11
Задание
Вариант №12
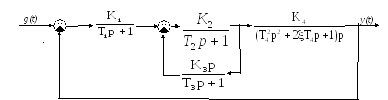
Рисунок 1 – Структурная схема системы управления
По структурной схеме, изображенной на рисунке 1, найти:
-
Передаточную функцию разомкнутой системы W(P);
-
Передаточную функцию замкнутой системы Ф(P);
-
Передаточную функцию ошибки системы Wx(P);
-
Записать дифференциальное уравнение замкнутой системы;
-
Записать характеристическое уравнение замкнутой системы;
-
Записать дифференциальное уравнение для ошибки;
-
Найти первые два коэффициента ошибки С0,С1;
-
Пользуясь структурными методами моделирования, составить схему для моделирования САУ на ПК и рассчитать в буквенном виде коэффициенты модели.
-
Выбрать параметры корректирующего устройства, обеспечивающие минимум интегральной оценки и для выбранных параметров построить переходный процесс в САУ.
1 Передаточная функция разомкнутой системы W(p):
![]() (1)
(1)
![]()

![]()
тогда, подставляя значения W1, W2 и W3 в (1) получаем:

![]()

![]()
![]() ;
(2)
;
(2)
2 Передаточная функция замкнутой системы Ф(p):
![]() ;
;
![]()
![]()
![]() ; (3)
; (3)
3 Передаточная функция ошибки системы Wx(p):
![]() ;
;

 ; (4)
; (4)
4 Дифференциальное уравнение замкнутой системы:
![]() ;
;
![]()
![]()
![]()
![]() (5)
(5)
5 Характеристическое уравнение замкнутой системы:
1+W(p)=0;
![]()
![]()
![]()
![]() (6)
(6)
6 Дифференциальное уравнение для ошибки:
![]() ;
;
![]()
![]()
![]()
![]()
![]()
![]()
![]() (7)
(7)
7 Найдем первые два коэффициента ошибки:
Чтобы получить коэффициенты ошибки, разложим передаточную функцию ошибки системы в степенной ряд:
![]() (8)
(8)
где с0, с1, с2 …— коэффициенты ошибок.
![]()
Обозначим:
L = T1+T2+T3+K2K3+2ξT4; M=K1K2K3; N= K1K2K4T3+1;
Исходя из формулы, поделим числитель Wx(p) на ее знаменатель:

отсюда первые два коэффициента ошибки:
![]() ; (9)
; (9)
![]() ;
(10)
;
(10)
8 Составим схему для моделирования САУ, пользуясь структурным методом:
Рассчитаем коэффициенты модели и найдем их сопротивления:
К1 = 10; T1 = 0,12 c; К2 = 5; T2 = 0,15 c; K4 = 2; T4 = 0,08 c; ξ = 0,5.
8.1 Рассмотрим инерционные звенья с передаточными функциями
1)![]() и 2)
и 2)![]()
Их электронная модель представлена на рисунке 3.

Рисунок 3 – Инерционное звено
Тогда 1)
![]() ,
,
![]() и 2)
и 2)
![]() ,
,
![]() ;
;
![]() ,
,
![]() ;
(11)
;
(11)
Рассчитаем коэффициенты для второго инерциального звена.
Примем С1 = 1 мкФ. При Т1 = 0,12 и K1 = 10 имеем: R1 = 0,012 МОм, R2 = 0,12 МОм
Примем С2 = 1 мкФ. При Т2 = 0,15 и K2 = 5 имеем: R1 = 0,03 МОм, R2 = 0,15 МОм.
Полученная схема САУ представлена на рисунке А.1 приложения А
8.2
Рассмотрим колебательное звено с
передаточной функцией

Его электронная модель представлена на рисунке 4.

Рисунок 4 – Колебательное звено
Здесь
![]() ;
;
![]() ;
;
![]() .
.
Задав значение
С = 1мкФ, найдем сопротивление резисторов
с коэффициентами К1, К2 и К3
по формуле
![]() ,
где Кi – коэффициент
усиления:
,
где Кi – коэффициент
усиления:
R(K1 = 312,5) = 0,0032 МОм;
R(K2 =156,25) = 0,0064 МОм;
R(K3 = 12,5) = 0,08 МОм;
8.3
Рассмотрим идеальное интегрирующее
звено с передаточной функцией

Его электронная модель представлена на рисунке 5.

Рисунок 5 – Модель идеального интегрирующего звена
![]() ;
;
Задаемся значением С1 = 1 мкФ. При k = 1 имеем: R1 = 1МОм.
8.4
Рассмотрим реальное дифференцирующее
звено с передаточной функцией

Его электронная модель представлена на рисунке 6.

Рисунок 6 – Реальное дифференцирующее звено
Тогда
![]() ,
,
![]() и
и
![]() .
.
Рассчитаем коэффициенты:
Задаемся значением R0 = 1 МОм. Предположим Т3 = 0,01, тогда K2 = 100 и R2 = 0,01 МОм. Меняя R1 найдем значение K3, обеспечивающее минимум интегральной оценки (см. задание 9):
![]() ; (12)
; (12)
9 Выберем параметры корректирующего устройства, обеспечивающие минимум интегральной оценки:
Будем использовать интегральную оценку
вида:
![]() .
.
Структурная схема для вычисления I имеет вид (рисунок 7):

Рисунок 7 – Схема вычисления I
На рисунке 7:
1) БВМ – блок вычисления модуля, электронная схема которого имеет вид (рисунок 8):

Рисунок 8 – Блок вычисления модуля
Пусть один из параметров реального интегрирующего звена равен: Т3 = 0,01 при R0 = 1 МОм.
Для нахождения минимума интегральной оценки придадим ряд фиксированных значений параметру R1, определим К3; определим величину I на выходе интегрирующего операционного усилителя (таблица 1).
Таблица 1 – Зависимость К2 от I2
|
К |
I, |
К |
I, |
|
0,005 |
0,27 |
0,03 |
0,17 |
|
0,01 |
0,175 |
0,04 |
0,2 |
|
0,015 |
0,165 |
0,045 |
0,23 |
|
0,02 |
0,162 |
0,05 |
0,27 |
|
0,025 |
0,16 |
0,055 |
0,34 |
График зависимости К от I имеет вид (рисунок 9):

Рисунок 9 – График зависимости К от I
Из рисунка 9 видно, что минимум интегральной оценки достигается при К3 = 0,025.
Переходный процесс, для найденных параметров корректирующих устройств, представлен на рисунке 10.

Рисунок 10 – График переходного процесса
Приложение А
(обязательное)
Схема для моделирования САУ на ПК

Рисунок А.1 – Схема САУ