

TAU-lab_rab_5
.docxФедеральное государственное бюджетное образовательное учреждение
Высшего профессионального образования
Омский государственный технический университет
Кафедра автоматизации и робототехники
Отчет по домашнему заданию №5
по дисциплине «Теория автоматического управления»
«Исследование влияния периода квантования сигнала на динамические параметры системы»
Вариант 1 (блок 2)
Проверила:
ст. пр. каф. АРТ
___________ Тоцкая И.В.
Выполнила:
ст. гр. БМТ-419
__________ Садкина А.А.
Омск 2012
Задание №5
-
Цель работы и использованные при ее выполнении технические и программные средства
Цель: исследовать влияние периода квантования сигнала по времени на работу системы автоматического терморегулирования с цифровым регулятором и определить критическое значение периода квантования сигнала, при достижении которого система становится неустойчивой.
Использованные средства: программный пакет Simulink программы MATLAB 7.9.
2. Исходные данные для выполнения задания
Исходными данными в данной работе служит математическая MATLAB-модель системы терморегулирования, полученная в задании 4 в виде структурной схемы, изображенной на рисунке 1.

Рис. 1. Структурная схема системы автоматического терморегулирования
3. Ввод модели
В системе, полученной в четвертом задании (рис.1), заменяем аналоговый регулятор на цифровой (программируемый контроллер) – Discrete PID Controller и добавляем импульсное звено – Zero-Order Hold. В результате получим систему, которая представлена на рис.2.

Рис. 2. Структурная схема системы с заменой на цифровой регулятор
Настроим коэффициенты Discrete PID Controller:
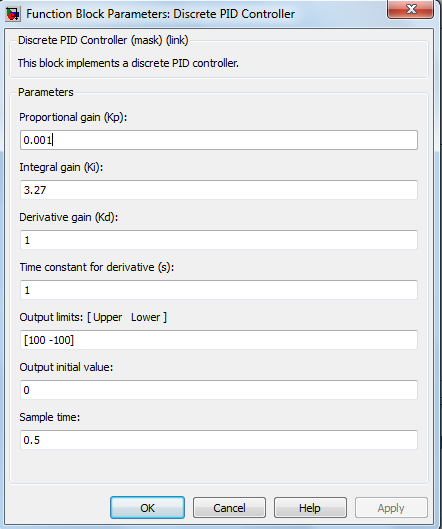
Рис. 3. Настройка цифрового регулятора
Изменяя
период квантования (Zero-Order
Hold
→ Parameters
→ Sample
Time),
мы получаем различные графики переходных
процессов. При периоде квантования,
превышающем Ткв с,
переходный процесс расходится и
система регулирования уровня теряет
устойчивость (рис.4). Таким образом,
указанное значение периода квантования
сигнала является критическим для
исследуемой системы.
с,
переходный процесс расходится и
система регулирования уровня теряет
устойчивость (рис.4). Таким образом,
указанное значение периода квантования
сигнала является критическим для
исследуемой системы.
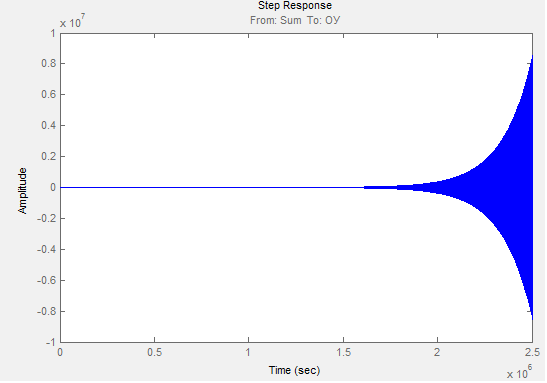
Рис. 4. Переходный процесс в системе при Tкв=264 с
При
периоде квантования равном 20c Ткв
Ткв 263
с
получаем сходящийся колебательный
переходный процесс (присутствует
перерегулирование) (рис.5,6).
263
с
получаем сходящийся колебательный
переходный процесс (присутствует
перерегулирование) (рис.5,6).
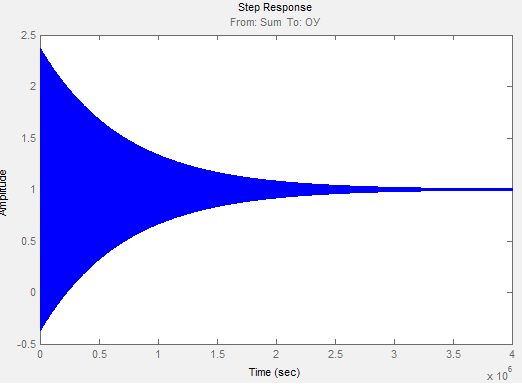
Рис. 5. Переходный процесс в системе при Tкв=264 с
При
снижении периода квантования до Ткв 19с
получаем апериодический переходный
процесс с
отсутствующим перерегулированием(рис.7,
8).
19с
получаем апериодический переходный
процесс с
отсутствующим перерегулированием(рис.7,
8).
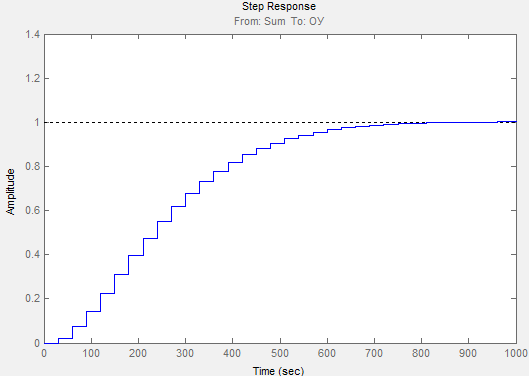
Рис.6. Переходный процесс в системе при Tкв=20 с
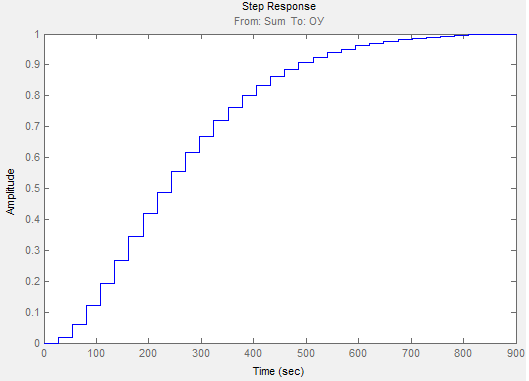
Рис.7. Переходный процесс в системе при Tкв=19 с
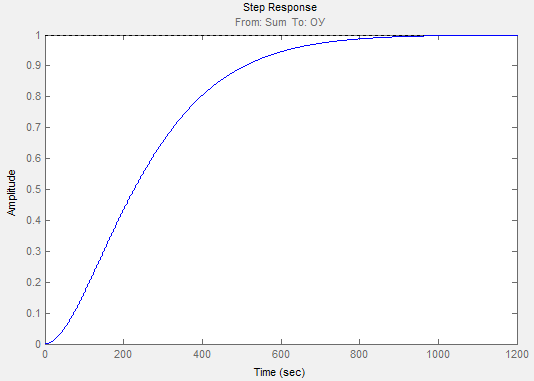
Рис.8. Переходный процесс в системе при Tкв=1 с
4. Заключение
В данной работе была произведена замена аналогового регулятора на цифровой и исследовано влияние на работу системы периода квантования сигнала по времени.
Критическим
значением периода квантования сигнала
является Ткр=264с.
При достижении критического значения
квантования сигнала система становится
неустойчивой. При
периоде квантования 20с Ткв
Ткв 3с
в системе появляется перерегулирование,
процесс носит колебательный характер.
При периоде квантования Tкв
3с
в системе появляется перерегулирование,
процесс носит колебательный характер.
При периоде квантования Tкв 9с
система
обладает апериодическим
переходным процессом без перерегулирования.
9с
система
обладает апериодическим
переходным процессом без перерегулирования.
Таким образом, увеличение периода квантования сигнала по времени приводит к ухудшению качества переходного процесса в системе. Период квантования сигнала по времени в данной системе регулирования уровня не должен превышать рекомендуемого максимально допустимого значения (Tкв=19c).