

курсовик (27)
.docФедеральное агентство по образованию
Государственное образовательное учреждение
Высшего профессионального образования
«Омский государственный технический университет»
Кафедра информатики и вычислительной техники
Специальность 230101
«Вычислительные машины,комплексы,системы и сети»
Курсовой проект по дисциплине «Основы теории управления»
Вариант №3
Выполнил:
студент группы ИВТ-318
Кошевой Н.В
Дата, подпись: _____________
Проверил: доцент Суриков Р.О.
Дата, подпись:
______________
Омск 2010
Вариант №3

С![]()
![]()
![]() труктурная
схема САУ:
труктурная
схема САУ:
В![]() ариант
№17:
ариант
№17:
Исходные данные для моделирования:
k1=10 c-1 T=0,12 с. =0,5
k2= 0.1 c-1 Т1=0,1 с.
k3=10 c-1 Т2=0,08 c.
kос и Tос вычисляем с помощью минимальной интегральной оценки.
По заданной структурной схеме САУ найти:
1. Передаточную функцию разомкнутой системы W(p);
2. Передаточную функцию замкнутой системы Ф(p);
3. Передаточную функцию ошибки Wx(p);
4. Записать дифференциальное уравнение замкнутой системы;
5. Записать характеристическое уравнение замкнутой системы;
6. Записать дифференциальное уравнение ошибки;
7. Найти первые два коэффициента ошибки С0, С1
8. Пользуясь структурным методом моделирования, составить схему для модели САУ на ЭВМ и рассчитать коэффициенты модели.
9. Выбрать параметры корректирующего устройства обеспечивающей минимум интегральной оценки и построить переходный процесс для выборных параметров.
1) Передаточная функция разомкнутой системы W(p):

![]()
![]()
![]()
2) Передаточная функция замкнутой системы Ф(р):
![]()
![]()
![]()
![]()
![]()
![]()
3) Передаточная функция ошибки Wx(p):
![]()
![]()
![]()
4) Дифференциальное уравнение замкнутой системы:
![]()
![]()
![]()
![]()
![]()
5) Характеристическое уравнение замкнутой системы:
![]()
![]()
![]()
6) Дифференциальное уравнение для ошибки:
![]()
![]()
![]()
![]()
![]()
![]()
7) Коэффициенты ошибки c0 и c1:
Поделив числитель Wx(p) на знаменатель Wx(p), получим:
с0=0 с1=![]() =0,025
=0,025
8) Расчет элементов типовых звеньев:
Колебательное звено:

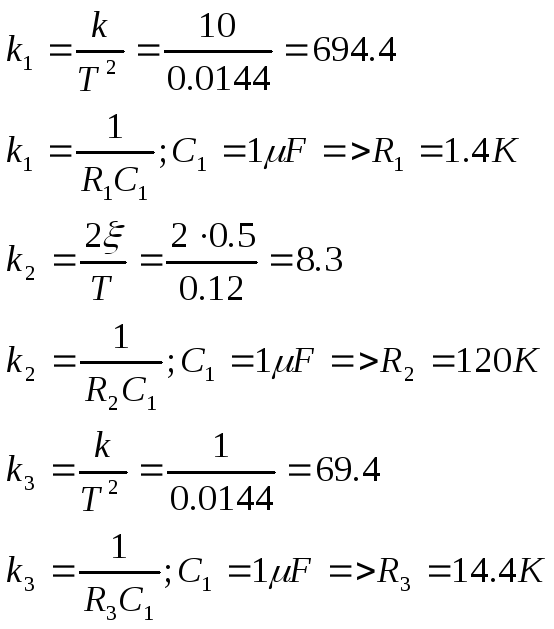
Инерционное звено с замедлением:

Приняв R1=1M, получим:

Инерционное звено:

Приняв R1=1M, получим:

Минимум интегральной оценки:

kmin=2.8 Imin= 0.129

Tmin=0.028 Imin=0.129
Исходя из kmin и Tmin рассчитаем дифференцирующее звено гибкой инерционной связи:

Приняв R3=1М, получим:

Приняв k3=1, получим:

Схема САУ:

График переходного процесса САУ:
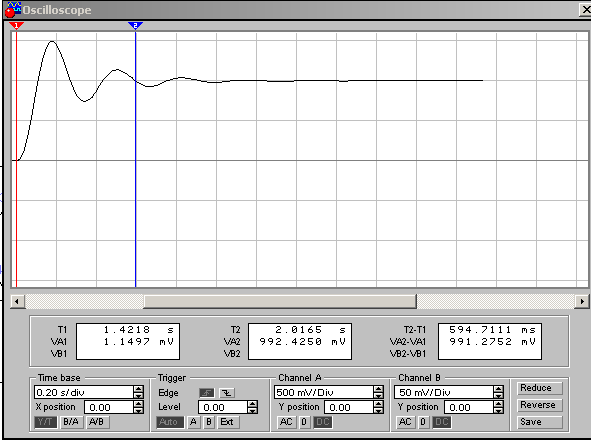
Для определения качественных параметров переходного процесса воспользуемся формулой:
![]()
Подставляя полученные результаты, получаем:
