

3. Анализ качества системы регулирования.
3.1 Оценка качества системы по логарифмическим характеристикам.
Оценку быстродействия в системе производим по частоте среза. Для системы удовлетворительного качества в первом приближении длительность tпппереходного процесса связана с частотой среза следующей зависимостью[5]:
 (9.0)
(9.0)
В нашем случае: ωс=0.5. Тогда быстродействие системы будет изменяться в следующих пределах:
6.28<tп<25,12 (9.1)
2) Исходя из ЛАХ системы с настроенными параметрами, запас устойчивости системы по амплитуде L2, который определяется как
 =
∞, (9.2)
=
∞, (9.2)
где - частота, соответствующая углу фазового сдвига –, в нашем случае равен бесконечности, так как график ЛФХ не пересекает ось частот. Это означает, что в системе отсутствует перерегулирование.
3) Запас устойчивости системы по фазе определим как
 (9.3)
(9.3)
где с3 - частота среза системы,
(с3)- фазовый угол системы на частоте среза.
Подставляя
найденные по графику (см. рис. 7) значения
в (9.3) получаем
получаем

что
удовлетворяет условию:
 ,
т.е. склонность к потере устойчивости
у системы невелика.
,
т.е. склонность к потере устойчивости
у системы невелика.
3.2 Исследование качества системы методом оценки переходного процесса.
Определим уравнение переходного процесса. Передаточная функция замкнутой системы (7.0) имеет вид:

тогда дифференциальное уравнение системы в операторной форме будет иметь вид

Для
того чтобы решение стало возможным,
структуру системы необходимо преобразовать
к виду, показанному на рис. 11.
Рис. 11. Структура системы
Получим систему уравнений:
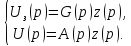 (10.0)
(10.0)
 (10.1)
(10.1)
Для
построения графика переходного процесса
дифференциальное уравнение решим
численным методом, в результате чего
получим таблицу решений, дающую точки
графика. При численном решении
дифференциального уравнения методом
Рунге-Кутты третьего порядка следует
преобразовать в систему уравнений
первого порядка. Для этого выполняется
подстановка вида

В результате этих подстановок и с учетом связей между новыми переменными получим систему дифференциальных уравнений первого порядка:
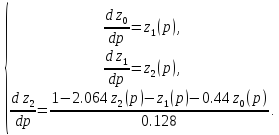 (10.2)
(10.2)
Общее решение уравнений системы в целом определим по формуле:
 ,
,
Решим дифференциальное уравнение и построим график переходного процесса при помощи MathCAD 13. Для этого зададим шаг решения равный 200, предел измерения текущего времени равного 12.56, начальные условия равны нулю.
Для этого в MathCADвведём следующие уравнения:
 (10.3)
(10.3)
Функция для правых частей:
 (10.4)
(10.4)
Решение дифференциального уравнения методом Рунге-Кутта:
![]() (10.5)
(10.5)
Конечный результат для вычисления переходного процесса:
![]() (10.6)
(10.6)
Найденные значения представлены в таблицах 8 и 9.

Таблица 8 Расчет точек переходного процесса

Таблица 9 Расчет точек переходного процесса
График переходного процесса изображен на рисунке 12.

Рис.8График переходного процесса системы
По графику переходного процесса можно определить, что в системе присутствует перерегулирование. График имеет колебательный апериодический характер.
Длительность переходного процесса, определим как время, прошедшие от начала переходного процесса (t = 0) до момента установления сигнала, отличающегося не более чем на 5% от установившегося значения. По графику переходного процесса (рис. 12) определим:
tпп=11.5 с.
Полученное значение оказалось меньше оценочного времени переходного процесса.
Величина перерегулирования определяется из соотношения (в процентах):
σ
=
 · 100% =
· 100% = ·
100% = 15 %, (10.7)
·
100% = 15 %, (10.7)
где
 ,
, - наибольшее и установившееся значения
выходного параметра, определяемые по
графику переходного процесса.
- наибольшее и установившееся значения
выходного параметра, определяемые по
графику переходного процесса.