

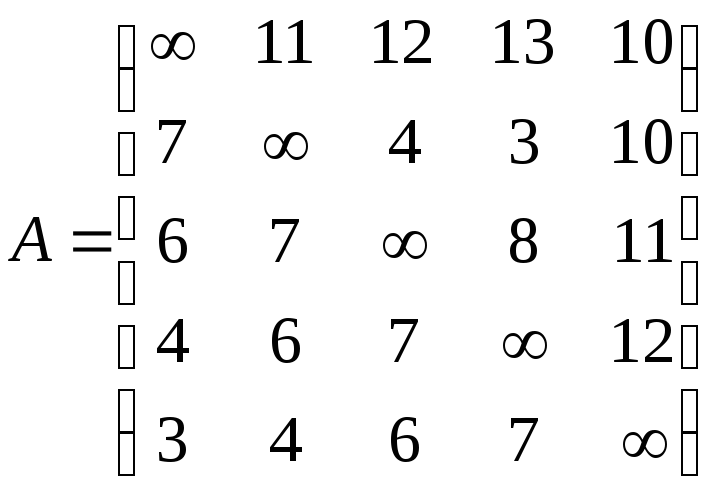
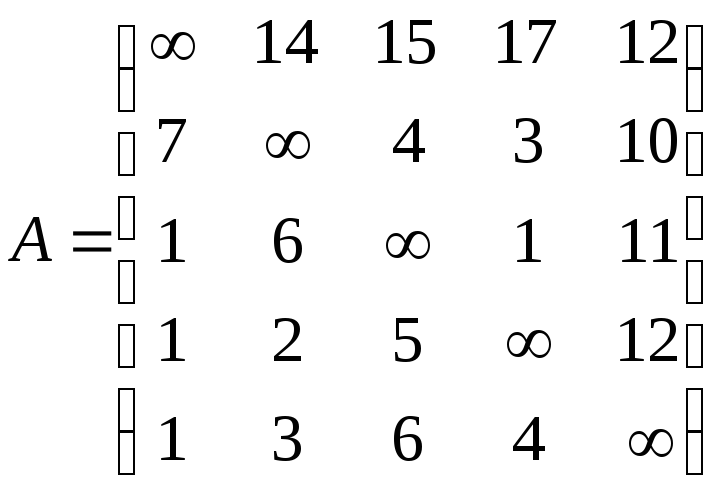
3.6 Задания по задаче о коммивояжере
|
3.1 |
|
3.2 | |
|
|
|
| |
|
|
|
| |
|
3.3 |
|
3.4 | |
|
|
|
| |
|
|
|
| |
|
3.5 |
|
3.6 | |
|
|
|
| |
|
|
|
| |
|
3.7 |
|
3.8 | |
|
|
|
| |
|
|
|
| |
|
3.9 |
|
3.10 | |
|
|
|
| |
|
|
|
| |
|
3.11 |
|
3.12 | |
|
|
|
| |
|
|
|
| |
|
3.13 |
|
3.14 | |
|
|
|
| |
|
|
|
| |
|
3.15 |
|
3.16 | |
|
|
|
| |
|
|
|
| |
|
3.17 |
|
3.18 | |
|
|
|
| |
|
|
|
| |
|
3.19 |
|
3.20 | |
|
|
|
| |
|
|
|
| |
|
3.21 |
|
3.22 | |
|
|
|
| |
|
|
|
| |
|
3.23 |
|
3.24 | |
|
|
|
| |
|
|
|
| |






















4. Динамическое программирование
Методом динамического программирования (ДП) решаются задачи математического программирования, удовлетворяющие принципу последовательной оптимизации: решение исходной задачи оптимизации большой размерности заменяется решением последовательности задач оптимизации малой размерности. В силу этого основным условием применимости метода ДП является возможность разбиения процесса принятия решений на ряд однотипных шагов, или этапов, каждый из которых планируется отдельно, но с учетом результатов, полученных на других шагах.
Рассмотрим, как
происходит разбиение процесса принятия
решений (который мы будем представлять
как процесс функционирования некоторой
системы) на nшагов. Обозначим через![]() начальное состояние всего процесса, в
то же время
начальное состояние всего процесса, в
то же время![]() будет начальным состоянием первого
шага. Тогда
будет начальным состоянием первого
шага. Тогда![]() – состояние системы после первого шага
(или начальное состояние второго шага),
– состояние системы после первого шага
(или начальное состояние второго шага),![]() – состояние системы после второго шага
(или начальное состояние третьего шага)
и т.д.
– состояние системы после второго шага
(или начальное состояние третьего шага)
и т.д.
Переход от начального
состоянияk-го
шага![]() кконечному состояниюk-го
шага
кконечному состояниюk-го
шага![]() происходит так.
происходит так.
Имеется набор
допустимых управлений(способов
действия на шагеk)![]() ,
каждое из которых позволяет перейти из
состояния
,
каждое из которых позволяет перейти из
состояния![]() к одному из возможных конечных состоянийk-го
шага
к одному из возможных конечных состоянийk-го
шага![]() .
Выбраное наk-м
шаге управление обозначим через
.
Выбраное наk-м
шаге управление обозначим через![]() ,
а состояние, в которое перейдет процесс
из состояния
,
а состояние, в которое перейдет процесс
из состояния![]() под воздействием управления
под воздействием управления![]() ,
обозначим
,
обозначим![]() .
При этом предполагается, что состояние
.
При этом предполагается, что состояние![]() зависит от
зависит от![]() и
и![]() ,
и не зависит от того, каким образом
процесс перешел в состояние
,
и не зависит от того, каким образом
процесс перешел в состояние![]() (принцип отсутствия последействия).
Это предположение записывается в виде
уравнений состояний
(принцип отсутствия последействия).
Это предположение записывается в виде
уравнений состояний
![]() ,
,
![]() .
.
С учетом введенных
понятий состояний и управлений запишем
показатели эффективности для всего
многошагового процесса и для каждого
k-го
шага процесса. Предполагая, что показатель
эффективностиk-го
шага зависит от начального состояния
на этом шаге![]() и от управления на этом шаге
и от управления на этом шаге![]() ,
получаем целевую функцию наk-м
шаге в виде
,
получаем целевую функцию наk-м
шаге в виде![]() и целевую функцию всего многошагового
процесса в виде
и целевую функцию всего многошагового
процесса в виде
![]() .
.
Сформулируем теперь
задачу ДП. Определить совокупность
допустимых управлений
![]() ,
переводящих процесс из начального
состояния
,
переводящих процесс из начального
состояния![]() в конечное состояние
в конечное состояние![]() и максимизирующих или минимизирующих
показатель эффективности
и максимизирующих или минимизирующих
показатель эффективности![]() .
.
Управление, при
котором достигается максимум (минимум)
целевой функции F,
называетсяоптимальным управлением![]() .
.
Основное правило ДП, сформулированное американским математиком Р. Беллманом, называется принципом оптимальности: оптимальное управление обладает таким свойством, что каково бы ни было начальное состояние на любом шаге и управление, выбранное на этом шаге, последующие управления должны выбираться оптимальными относительно состояния, к которому придет процесс в конце данного шага.