

Лекция 6. Кинематический анализ рычажных механизмов.
Цель: ознакомить студентов с целями и задачами кинематического анализа, показать последовательность проведения кинематического анализа типовых рычажных механизмов различными методами.
План:
Цели, задачи и методы кинематического анализа
Графический метод кинематического анализа
Графоаналитический метод кинематического анализа
Аналитический метод кинематического анализа
Экспериментальный метод кинематического исследования
![]()
1. Цели, задачи и методы кинематического анализа
Цели:
Определение кинематических характеристик звеньев: перемещение; скорость; ускорение; траектория движения; функция положения при известных законах движения входных (ведущих) звеньев.
Оценка кинематических условий работы рабочего (выходного) звена.
Определение необходимых численных данных для проведения силового, динамического, энергетического и других расчётов механизма.
Задачи:
о положениях звеньев механизма. Определение траекторий движения точек;
о скоростях звеньев или отдельных точек механизма;
об ускорениях звеньев или отдельных точек механизма.
Методы:
графический (или метод графиков и диаграмм);
графоаналитический (или метод планов скоростей и ускорений);
аналитический;
экспериментальный.
2. Графический метод кинематического анализа
Преимущество этого метода заключается в наглядности и простоте. Недостаток метода – невысокая точность, которая зависит от точности графических построений.
Задача о положениях решается построением нескольких совмещённых планов механизма в выбранном масштабе длин при различных последовательных положениях ведущего звена.
Задачи о скоростях и ускорениях решаются построением графиков (диаграмм) перемещений, скоростей и ускорений исследуемой точки.
Последовательность кинематического анализа:
Сначала строят несколько (чаще всего 12 и более) совмёщенных планов положений механизма в произвольно выбранном масштабе длин.
Затем строят график пути (перемещения) исследуемой точки или звена, для чего используют совмещённые планы механизма и последовательные положения на них исследуемой точки или звена.
Графическим дифференцированием графика перемещений строят график скорости исследуемой точки.
Графическим дифференцированием графика скоростей строят график ускорений.
Графическое дифференцирование можно производить методом хорд и методом касательных. С целью повышения точности удобно использовать оба метода одновременно.
Пример 6.1.
Даны кривошипно-ползунный механизм, длины звеньев которого – кривошипа и шатуна – LOA и LAB соответственно, и угловая скорость кривошипа 1 = const.
Определить скорости и ускорения ползуна при различных положениях кривошипа.
Решение
Выбираем
масштабы длин
![]() ,
м/мм, где AO
– длина отрезка, мм, изображающая
кривошип длиной LОА
на строящемся плане механизма; эта длина
выбирается произвольно с учётом того,
что совмещённые планы механизма должны
разместиться на отведённом месте
чертежа, а сам масштаб длин был бы удобен
для дальнейших расчётов.
,
м/мм, где AO
– длина отрезка, мм, изображающая
кривошип длиной LОА
на строящемся плане механизма; эта длина
выбирается произвольно с учётом того,
что совмещённые планы механизма должны
разместиться на отведённом месте
чертежа, а сам масштаб длин был бы удобен
для дальнейших расчётов.
Вычисляем длину отрезка
![]() ,
мм, изображающего шатун на плане
механизма. При построении совмещенных
планов механизма используют метод
засечек (рис. 6.1).
,
мм, изображающего шатун на плане
механизма. При построении совмещенных
планов механизма используют метод
засечек (рис. 6.1).
Для построения графиков скоростей и ускорений (рис. 6.1) выбираются полюсные расстояния h и ha, где h – полюсное расстояние при построении графика скоростей, которое выбирается произвольной длины; рекомендуется его величину выбирать в пределах h 30…40 мм; ha – полюсное расстояние при построении графика ускорений; его рекомендуется принимать в пределах ha 30…40 мм.
Масштабы времени, скорости и ускорения вычисляют по формулам, вывод которых приводится ниже.
Масштаб времени можно вычислить по формуле
![]() ,
,
где Т – период одного оборота кривошипа, с; LX – длина отрезка между точками 1 и 1 на графике (диаграмме) перемещений, мм.
Так как период Т можно вычислить по формулам
![]() ,
или
,
или
![]() ,
с,
,
с,
где ω1 – угловая скорость кривошипа, 1/с; n1 – частота вращения кривошипа, об/мин, то масштаб времени
![]() ,
с/мм.
,
с/мм.
Масштаб скорости можно вывести из условия, что скорость исследуемой точки является производной перемещения S по времени:
![]() .
.
Здесь предполагается, что масштаб перемещений μs и масштаб времени μt являются постоянными величинами.
Так
как
![]() ,
то
,
то
![]() ,
отсюда
,
отсюда
![]() ,
,
![]() .
.
Масштаб ускорения, вывод которого аналогичен предыдущему, вычисляется по формуле
![]() ,
,![]() .
.
Для определения величины скорости или ускорения в каком-либо положении точки В необходимо длину ординаты соответствующего графика умножить на масштаб v или a соответственно.
v = f (t)
α
yB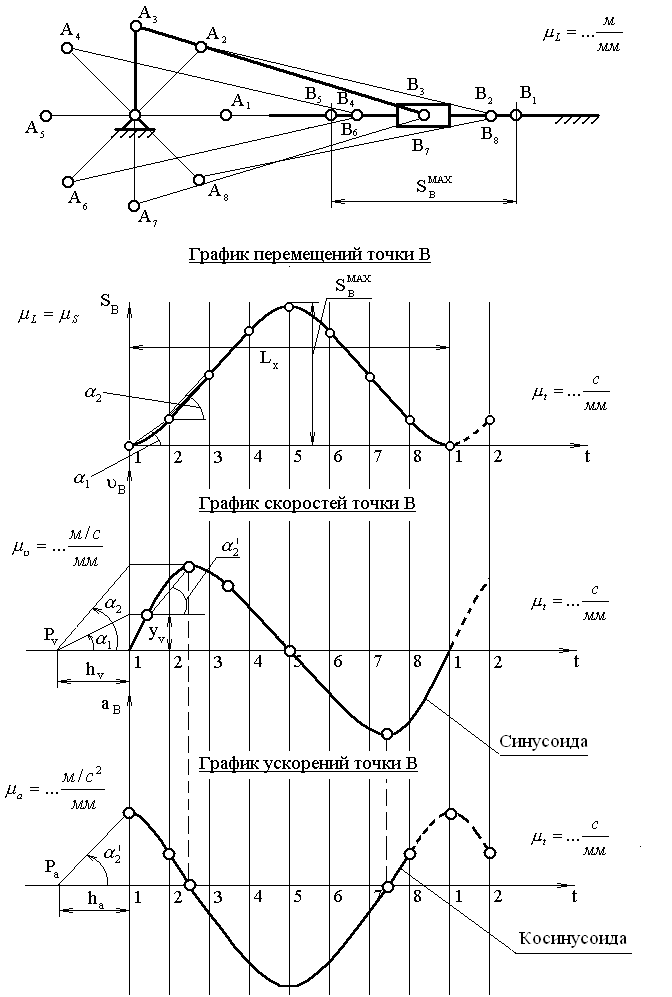
![]()

a = f (t)
α
Рис. 6.1. Планы положений механизма, графики перемещений, скоростей и ускорений