

14.2. Существование решения нелинейных уравнений установившегося режима
Обусловленность матриц характеризуется числами обусловленности [3]. Одно из чисел обусловленности равно отношению наибольшего и наименьшего по модулю собственных значений матрицы. Непосредственный расчет этих чисел трудоемок. Элементы матрицы производных уравнений установившегося режима (матрица Якоби) зависят как от параметров сети, так и от параметров режима. Поэтому плохая обусловленность матрицы Якоби может быть следствием как сильного различия (неоднородности) параметров сети, так и близости рассчитываемого режима к предельному по существованию или апериодической статической устойчивости.
Неоднородность
электрической сети велика, если имеются
устройства продольной компенсации,
шиносоединительные выключатели либо
близкие к нулю сопротивления обмотки
среднего напряжения трехобмоточных
трансформаторов и автотрансформаторов.
В этих случаях плохо обусловлена как
матрица
![]() ,
так и матрица Якоби. Как правило, плохая
обусловленность матрицы может
характеризоваться относительной
малостью определителя. Близость режима
к предельному по существованию или по
апериодической статической устойчивости
[3] соответствует приближению к нулю
якобиана, то есть определителя матрицы
Якоби уравнений установившегося режима,
и плохой обусловленности матрицы Якоби
[3].
,
так и матрица Якоби. Как правило, плохая
обусловленность матрицы может
характеризоваться относительной
малостью определителя. Близость режима
к предельному по существованию или по
апериодической статической устойчивости
[3] соответствует приближению к нулю
якобиана, то есть определителя матрицы
Якоби уравнений установившегося режима,
и плохой обусловленности матрицы Якоби
[3].
При задании активных мощностей и модулей напряжений в генераторных узлах при сформулированных в [3] допущениях якобиан уравнений установившегося режима совпадает со свободным членом характеристического уравнения и прохождение якобиана через нуль соответствует пределу по апериодической устойчивости. Поэтому в данном случае приближение к нулю якобиана соответствует приближению к пределу по апериодической устойчивости.
Как правило,
приближение к нулю якобиана соответствует
ухудшению обусловленности матрицы
![]() .
Строго говоря, величина определителя
не всегда характеризует обусловленность.
В тех случаях, когда наибольшее по модулю
собственное число матрицы
.
Строго говоря, величина определителя
не всегда характеризует обусловленность.
В тех случаях, когда наибольшее по модулю
собственное число матрицы
![]() остается конечным, приближение к нулю
якобиана
остается конечным, приближение к нулю
якобиана
![]() соответствует резкому ухудшению
обусловленности.
соответствует резкому ухудшению
обусловленности.
Сходимость решения
нелинейных уравнений установившегося
режима связана с величиной якобиана
системы уравнений установившегося
режима, т.е. с условиями существования
и единственности. Последние используется
при расчетах режимов близких к пределу
по апериодической устойчивости. Если
якобиан равен нулю в точке решения
![]() ,
то методы простой итерации или Зейделя
не сойдутся при решении системы уравнений
установившегося режима.
,
то методы простой итерации или Зейделя
не сойдутся при решении системы уравнений
установившегося режима.
14.3. Существование решения нелинейных уравнений установившегося режима
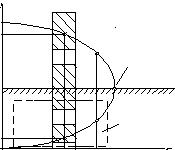
Существование решения поясним на примере уравнения установившегося режима линии только с реактивным сопротивлением х , изображенной на рис 14.2, а.


![]()
![]()
![]()
![]()













![]()
![]()
![]()
![]()
![]() 2
2
![]() 4
4
![]()
![]()
900 5
![]()
![]() 3
3
![]()
![]() 1
1
![]()
0 a
![]() b
b
![]() P
P
б)
Рис 14.2. Существование и единственность решения установившегося режима:
а – линия с реактивным сопротивлением; б – определение установившегося режима.
Уравнение установившегося режима — это уравнение мощности, передаваемой по линии [3]:
![]() ,
(14.10)
,
(14.10)
где
![]() - модули
напряжений в узлах 1 и 2;
- модули
напряжений в узлах 1 и 2;
Р - мощность, текущая по линии, потребляемая в узле 2 и генерируемая в узле 1;
![]() -
фаза напряжения в узле 2.
-
фаза напряжения в узле 2.
При
![]() ,
,
![]() предел
передаваемой мощности – постоянная
величина:
предел
передаваемой мощности – постоянная
величина:
![]() ,
(14.11)
,
(14.11)
и уравнение (14.111) имеет следующий вид:
![]() .
(14.12)
.
(14.12)
Для удобства
направим активную мощность по
горизонтальной оси, а угол
![]() -
по вертикальной (рис.14.2, б). Найти решение
уравнения установившегося режима - это
значит для любого значения мощности
найти соответствующее ему значение
угла
-
по вертикальной (рис.14.2, б). Найти решение
уравнения установившегося режима - это
значит для любого значения мощности
найти соответствующее ему значение
угла
![]() .
Геометрически на рис.14.2,
б решение
соответствует пересечению прямой,
параллельной оси Р
(то есть прямой
P
= const),
с синусоидой. Например, при Р
= Р2
= const
решение соответствует точке 1 с
координатами Р2,
.
Геометрически на рис.14.2,
б решение
соответствует пересечению прямой,
параллельной оси Р
(то есть прямой
P
= const),
с синусоидой. Например, при Р
= Р2
= const
решение соответствует точке 1 с
координатами Р2,
![]() или точке 2 с
координатами
Р2
и
или точке 2 с
координатами
Р2
и
![]() .
.
Рассмотрим
прямоугольную область
![]() ,
,
![]() ,
заштрихованную на рис.14.2, б вокруг точки
1. Решение уравнения установившегося
режима существует в этой области, если
для каждого значения Р
в интервале
[а, b]
существует одно или несколько значений
,
заштрихованную на рис.14.2, б вокруг точки
1. Решение уравнения установившегося
режима существует в этой области, если
для каждого значения Р
в интервале
[а, b]
существует одно или несколько значений
![]() ,
которые совместно с Р
удовлетворяют
уравнению (14.12).
,
которые совместно с Р
удовлетворяют
уравнению (14.12).
Геометрически
существование решения для всех Р
в прямоугольнике
![]() ,
,
![]() означает,
что любая прямая в этом прямоугольнике,
параллельная оси
означает,
что любая прямая в этом прямоугольнике,
параллельная оси
![]() ,
пересечет синусоиду хотя бы один раз
внутри этого прямоугольника. Аналогичное
решение существует внутри прямоугольника
,
пересечет синусоиду хотя бы один раз
внутри этого прямоугольника. Аналогичное
решение существует внутри прямоугольника
![]() ,
,
![]() ,
заштрихованного на рис.14.2, б вокруг
точки 2. Внутри
же прямоугольника
,
заштрихованного на рис.14.2, б вокруг
точки 2. Внутри
же прямоугольника
![]() ,
,
![]() не существует решения уравнений
установившегося режима. В этом
прямоугольнике ни одна прямая Р=
const
не пересекает кривую уравнения
установившегося режима (14.10) [3].
не существует решения уравнений
установившегося режима. В этом
прямоугольнике ни одна прямая Р=
const
не пересекает кривую уравнения
установившегося режима (14.10) [3].
Решение существует
для любого положительного значения
мощности, которая меньше, чем предел
передаваемой по линии мощности
![]() .
Для мощности
.
Для мощности
![]() решение уравнения установившегося
режима не существует. Физически
несуществование решения означает, что
по линии с сопротивлением х
при модулях
напряжений на концах линии
решение уравнения установившегося
режима не существует. Физически
несуществование решения означает, что
по линии с сопротивлением х
при модулях
напряжений на концах линии
![]() ,
,
![]() нельзя передать мощность больше предела
передаваемой мощности
нельзя передать мощность больше предела
передаваемой мощности
![]() ,
который определяется выражением (14.11).
,
который определяется выражением (14.11).
Нелинейные уравнения установившегося режима можно записать в виде системы неявных функций:
![]() (14.13)
(14.13)
где Y - вектор независимых переменных (регулируемых параметров режима);
X - вектор зависимых переменных (нерегулируемых параметров режима);
W - вектор-функция, например небалансов мощности или тока в узлах.
Размерность вектор-функции равна размерности вектора X.
Существование
решения в общем виде, то есть для уравнений
(14.13), состоит в следующем. Существование
решений уравнений установившегося
режима при заданном значении вектора
независимых переменных
![]() означает, что имеется хотя бы одно
значение вектора зависимых переменных
означает, что имеется хотя бы одно
значение вектора зависимых переменных
![]() -
такое, что параметры режима
-
такое, что параметры режима
![]() удовлетворяют уравнениям установившегося
режима.
удовлетворяют уравнениям установившегося
режима.