

Лекции / Лекция 34 Регулирование скорости ДПТ. ч1
.pdfРегулирование скорости ДПТ. Ч 1.
Регулирование частоты вращения двигателей независимого (параллельного) возбуждения. Согласно уравнению (5.5) частота вращения равна
n c1(U Ia Ra) ,
из чего следует, что ее можно регулировать тремя способами: изменением напряжения якоря U , изменением сопротивления цепи якоря Ra и изменением
потока возбуждения . При сопоставлении характеристик двигателя в процессе регулирования за исходную принимают скоростную или механическую характеристику, полученную при номинальных значениях напряжения и тока возбуждения, а также при отсутствии добавочных сопротивлений в цепи якоря. Такую характеристику называют естественной. Характеристики, полученные при неноминальных значениях напряжения, тока возбуждения или при наличии добавочного сопротивления в цепи якоря, называют искусственными.
U
Raд
Ia
Rв
Регулирование |
скорости |
|
вращения двигателя параллель- |
|
|
ного возбуждения |
изменением Рис. 5.12. Схема включения регули- |
|
сопротивления в |
цепи якоря. |
ровочногореостата Raд |
Схема двигателя изображена на |
|
|
рис. 5.12. Реостат Raд в цепи якоря должен быть подобран так, чтобы регулирование скорости можно было производить в желаемых преде-

лах. Будем считать, что при регулировании напряжение сети и ток возбуждения остаются постоянными, т.е. U const и Iв const. Пусть, кроме того, статический момент не зависит от скорости вращения двигателя, т.е. Mc const. В установившемся режиме работы до регулирования имеем:
Ia1 U Ea U Cen .
Ra Ra
Теперь введем в цепь якоря сопротивление Raд , переведя под-
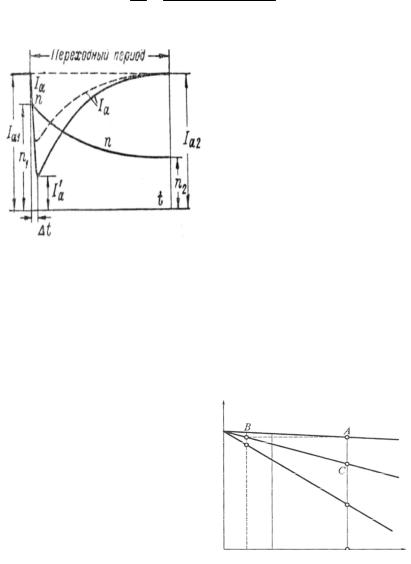
вижной контакт регулировочного реостата из нулевого положения. Предположим, что механическая инерция вращающихся частей двигателя и исполнительного механизма настолько относительно велика, что мы можем пренебречь изменением скорости вращения двигателя n в ближайший вслед за введением реостата элемент времени t . Тогда ток в цепи якоря уменьшается до значения
|
Ia |
U Cen |
Ia1 |
|
|
Ra |
. |
|
|
|
|
R |
|
|
|
||||
|
|
R R |
рг |
a |
R |
|
|||
|
|
a |
|
рг |
|
||||
Такое уменьшение тока якоря влечет за собою уменьшение вра- |
|||||||||
щающегося момента двигателя |
Mэм См Ia пропорционально отно- |
||||||||
шению Ia |
/Ia1, если пренебречь реакцией якоря и считать, |
что при |
|||||||
rв const |
поток const . Следовательно, на валу двигателя возни- |
||||||||
кает отрицательный динамический момент |
MJ Mэм Mc , |
под дей- |
|||||||
ствием которого скорость двигателя начинает уменьшаться. Но уменьшение скорости вызывает пропорциональное уменьшение ЭДС Ea Cen и соответственно увеличение тока Ia пропорционально
разности U Cen . Этот процесс уменьшения n и обратной ЭДС Ea
и параллельного с этим увеличения тока Ia будет идти до тех пор,
пока ток Ia и, стало быть, вращающий момент Mэм |
не достигнут сво- |
их первоначальных значений. Так как при этом MJ |
0, то двигатель |
начинает работать в новом установившемся режиме при n2 n1, причем
n2 U Ia1(Ra Rрг ) .
n1 |
U Ia1Ra |
Из сказанного следует,
что:
а) подводимая к двигателю из сети мощность Р1 UIa оста-
ется без изменения; б) полезная мощность двигателя уменьшается пропорционально n, соответственно чему в той же степени уменьшается и КПД установки; в) условия охлаждения двигателя ухудшаются, так как потери в обмотке двигателя остаются без изменения, а количество вентилирующего двигатель воздуха уменьшается примерно пропорционально скорости n; г) усло-
вия коммутации несколько улучшаются вследствие уменьшения ЭДС er .
Если система двигателя обладает относительно малой инерцией, то весь процесс идет в таком же порядке, как выше, но бросок тока Ia
после введения сопротивления Rрг |
будет меньше (прерывистая линия |
||||||||
на |
рис. 5.13), |
так |
как одновре- |
n |
|
||||
менно с уменьшением тока |
Ia |
|
|||||||
|
Raд 0 |
||||||||
происходит некоторое уменьше- |
n |
||||||||
ние скорости n. |
|
|
|
ои |
Raд1 0 |
||||
|
|
Механические |
(скорост- |
|
|||||
ные) характеристики для двига- |
|
|
|||||||
телей независимого и параллель- |
|
Raд2 Raд |
|||||||
ного возбуждения при различных |
|
||||||||
значениях |
Ra |
показаны |
на |
M Mc1 |
|
||||
рис. 5.14. |
|
|
|
|
|
|
|||
R |
|
Верхняя |
характеристика |
Ia1 M Mc2 |
M(IA) |
||||
|
0 |
является естественной. |
Рис. 5.14. Механические (скорост- |
||||||
ад |
|
|
|
|
|
|
ные) характеристики при изменении |
||
Из уравнения (5.5) |
|
следует, |
что |
||||||
все |
|
характеристики |
выходят |
из |
сопротивления цепи якоря |
||||
|
|
|
|||||||

одной точки, соответствующей частоте вращения n0и при идеальном холостом ходе (M 0, Ia 0):
U
n0и с1 .
Рассматриваемым способом можно уменьшать частоту вращения в широких пределах, вплоть до нулевого значения. Однако при низких частотах вращения механические характеристики оказываются круто падающими, что приводит к нестабильной работе двигателя. Нестабильность проявляется в том, что небольшие колебания момента сопротивления Mc будут вызывать относительно большие колебания
частоты вращения или даже остановку двигателя. Это обстоятельство во многих случаях ограничивает пределы регулирования данным способом. Диапазон регулирования скорости при номинальном моменте обычно не превышает 10:1.
Регулирование скорости двигателя независимого возбуждения
изменением потока. Будем, как и раньше, |
считать, что U const и |
M const . Сопротивление в цепи якоря Rрг |
0. |
Так как в номинальном режиме (на естественной характеристике) магнитная цепь двигателя рассчитывается на работу почти с наибольшими значениями магнитного потока (на колене кривой характеристики холостого хода), то увеличение тока возбуждения не приводит к заметному увеличению потока. Поэтому поток изменяют в сторону уменьшения от расчетного значения путем уменьшения тока возбуждения.
Предположим, что, введя реостат Rв (рис. 5.12), мы уменьшили ток возбуждения от значения iв1 до значения iâ2 , а поток – от зна-
чения 1 до значения 2 . Будем, как и раньше, считать, что в ближайший после введения реостата момент времени изменением скоро-
сти вращения n можно пренебречь. Если Ia1 |
и Ia – токи якоря до и |
||||||
после введения реостата, то |
|
|
|
|
|||
Ia1 |
U Ea |
|
U Cen1 1 |
и Ia |
U Cen1 2 |
, |
|
|
|||||||
|
|
|
|||||
|
Ra |
Ra |
Ra Rрг |
||||
откуда

|
|
|
|
Ia1 |
|
|
U Cen1 2 |
. |
|
|
|||
|
|
|
|
Ia |
|
|
|
|
|||||
|
|
|
|
|
|
U Cen1 1 |
|
|
|||||
Из |
этой |
формулы |
|
следует, |
|
что |
если, как |
обычно, |
|||||
Ea (0,9..0,96)U, |
то данному изменению потока соответствует во |
||||||||||||
много раз большее изменение тока |
якоря |
Ia . Пусть, |
например, |
||||||||||
2 0,8 1 |
и Ea 0,92U ; тогда |
|
|
|
|
|
|||||||
|
|
|
I |
1 0,8 0,92 |
|
|
|||||||
|
|
|
a1 |
|
|
|
|
|
3,3 |
, |
|
||
|
|
|
|
|
1 0,92 |
|
|
||||||
|
|
|
Ia |
|
|
|
|
|
|
||||
т.е. при уменьшении потока всего на 20 % ток Ia увеличивается в первый момент более чем в три раза. При больших относительных значениях Ea броски тока Ia в начальный момент времени еще больше.
Соответственно значительно большему увеличению тока Ia
сравнительно с уменьшением потока вращающий момент двигателя увеличивается в отношении
C1 2Ia 0,8 3,3 2,64;
C1 1Ia
так как, согласно условию, статический момент сопротивления Mc const, то на валу двигателя появляется положительный динами-
ческий момент MJ , под действием которого скорость двигателя начинает расти. Пропорционально этому увеличению скорости растет ЭДС двигателя Ea , а ток Ia уменьшается. Такой процесс увеличения скорости и параллельно с этим уменьшения тока Ia продолжается до тех пор, пока вращающий момент Mэм не станет равен моменту со-
противления Mc ; в этих условиях MJ =0, и двигатель переходит на работу в новом установившемся режиме. Новые значения тока Ia2 и
скорости n2 определятся по формулам
Ia2 |
|
M |
и n2 |
|
U Ia2Ra |
. |
Cм 2 |
|
|||||
|
|
|
|
Ce 2 |
||
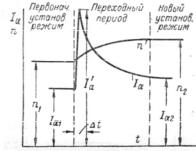
Изменения тока |
Ia |
и скорости n при U const и |
Mc const |
показаны графически на рис. |
|
||
5.15. В результате подводимая к |
|
||
двигателю |
мощность |
|
|
P1 U(Ia iв) растет |
практиче- |
|
|
ски пропорционально |
току Ia ; |
|
|
мощность Р2 M2 2 n |
растет |
|
|
пропорционально скорости; при |
|
||
таком одновременном |
увеличе- |
|
|
нии подводимой и отдаваемой |
|
||
мощностей КПД двигателя мало |
|
||
изменяется. Таким образом, данный способ позволяет плавно и экономично регулировать скорость вращения двигателя параллельного возбуждения. Но
наряду с этим: а) условия коммутации заметно осложняются как вследствие большей скорости двигателя, так и из-за увеличения тока Ia и, следовательно, линейной нагрузки A ; б) несколько ухудшаются
условия охлаждения якоря, так как потери в обмотке якоря увеличиваются в большей степени, чем количество вентилирующего воздуха; в) уменьшается степень устойчивости работы двигателя, так как основное поле ослабляется, а реакция якоря увеличивается. Поэтому двигатели параллельного возбуждения, предназначенные для работы в режиме переменной скорости, например, в диапазоне 1:2 или 1:3, должны быть специально рассчитаны в механическом, коммутационном и тепловом отношении.
При сильно ослабленном магнитном поле, особенно если щетки в машинах с добавочными полюсами установлены с некоторым сдвигом против направления вращения якоря, т.е. на размагничивание, могут возникнуть «качания», т.е. периодические колебания скорости вращения около некоторого его среднего значения. При этом особенно важное значение имеет действие размагничивающей реакции якоря. Будем считать, что Mc const. Если, например, ток Ia резко увели-
чивается, то размагничивающее действие реакции якоря может повести к такому ослаблению магнитного потока двигателя, что, несмотря на увеличение тока Ia , вращающий момент двигателя Mэм Cм Ia
окажется меньше статического момента Mc .

На валу двигателя появится отрицательный динамический момент, и скорость двигателя начнет уменьшаться. При этом начнет уменьшаться ток Ia и одновременно с этим будет уменьшаться и действие реакции якоря, т.е. будет расти поток . Если при этом произведение Ia будет расти, то при некотором значении этих величин момент Mэм станет равным моменту Mc , а затем может превысить
его. На валу двигателя появляется положительный динамический момент, и скорость вращения двигателя начнет увеличиваться; нагрузочный ток Ia начнет расти, и процесс колебания скорости может начать
повторяться.
Математический анализ этого явления показывает, что в зависимости от параметров двигателя возможны следующие режимы изменения его скорости: а) апериодический затухающий, б) периодический затухающий, в) периодический установившийся с частотою колебаний f 10..50 периодов в минуту и г) периодический или апериодический
возрастающий.
Чтобы устранить колебания скорости, магнитная система двигателей, в которых такие колебания предположительно возможны (например, двигатели с широким регулированием скорости путем ослабления основного поля), должна быть надлежащим образом рассчитана.
Если не учитывать изменение магнитного потока из-за реакции якоря, то скоростные характеристики двигателей независимого и параллельного возбуждения будут представлять собой прямые линии (сплошные линии на рис. 5.16).
С уменьшением магнитного потока увеличивается скорость идеального холостого хода n0и . Все скоростные характеристики выходят из одной точки, соответствующей току короткого замыкания двигателя
U
Iк Ra .
Механические характеристики n f M , приведенные на рис.
5.17, имеют те же скорости идеального холостого хода, что и скоростные характеристики. Однако с осью абсцисс они будут пересекаться в разных точках, так как при одном для всех характеристик токе короткого замыкания потоки и, следовательно, пусковые моменты будут различны. Если не учитывать влияние реакции якоря, то механические
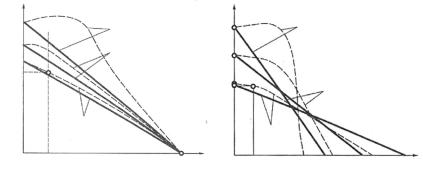
характеристики будут представлять собой прямые линии (сплошные линии на рис. 5.17).
n |
n |
Iв2 I
Iв1 I
nном
Iвном
в1 |
Iв2 Iв1 |
вном |
nном |
|
|
|
Iв Iвном |
Iк
Ia ном |
Ia |
Mном |
Iв ном |
M |
Рис. 5.16. Скоростные характери- |
Рис. 5.17. Механические |
|
||
стики двигателей независимого (па- |
характеристики двигателей |
|
||
раллельного) возбуждения при из- |
независимого(параллельного) |
|
||
менении тока возбуждения |
|
возбуждения при изменении тока |
||
|
|
|
возбуждения |
|
Как видно из рис. 5.17, механические характеристики пересекаются между собой, поэтому при моментах сопротивления, лежащих правее точек пересечения, уменьшение магнитного потока будет вызывать не увеличение частоты вращения, а ее уменьшение. Чем больше сопротивление цепи якоря Ra , тем меньшим значениям момента
будут соответствовать точки пересечения механических характеристик. Для двигателей мощностью несколько киловатт и более точки пересечения характеристик находятся вне рабочей зоны (момент сопротивления больше номинального), поэтому в пределах рабочей зоны частота вращения с уменьшением магнитного потока возрастает. Уменьшение частоты вращения при ослаблении поля может наблюдаться только в машинах малой мощности.
На рис. 5.16 и 5.17 штриховыми линиями показаны скоростные и механические характеристики с учетом влияние размагничивающего действия реакции якоря. При малых токах возбуждения они могут приобрести возрастающий характер, а работа двигателя при возрастающих характеристиках носит неустойчивый характер. Уменьшение магнитного потока из-за размагничивающего действия реакции якоря приводит также к уменьшению пускового момента.
Неустойчивая работа двигателя при малых токах возбуждения является одной из причин, ограничивающих верхний предел частоты
вращения при этом способе регулирования. Другой причиной, ограничивающей максимальную частоту вращения, является ухудшение коммутации. Обычно дополнительные полюсы в машинах постоянного тока настраиваются на получение несколько ускоренной коммутации. Поэтому значение коммутирующей ЭДС выбирается несколько большей, чем требуется для компенсации реактивной ЭДС. При повышении частоты вращения пропорционально увеличиваются коммутирующая и реактивная ЭДС и, следовательно, их разность. При определенной частоте вращения эта разность может достигнуть недопустимого значения. Коммутация будет сильно ускоренной, появятся ток разрыва и усилится искрение под щетками. Нормальная работа машины будет невозможна. Кроме того, коммутация при высоких частотах вращения ухудшается из-за повышенной вибрации щеточного аппарата, а также вследствие увеличения максимального напряжения между соседними коллекторными пластинами из-за сильного искажения магнитного поля двигателя.