

Лекции / Лекция 32 Двигатели постоянного тока
.pdfДвигатели постоянного тока
Двигатели постоянного тока находят широкое применение в тех случаях, когда по условиям работы исполнительного механизма требуется широкое изменение частоты вращения. При этом во многих случаях двигатели постоянного тока имеют преимущества по сравнению с двигателями переменного тока. Они используются в металлургической промышленности, станкостроении, в системах автоматического регулирования и т.д. Широкое применение двигатели постоянного тока находят на электрическом транспорте, в авиации и в автомобилестроении. Мощности, на которые выпускаются эти двигатели, лежат в пределах от нескольких ватт до нескольких тысяч киловатт.
Как и генераторы, двигатели постоянного тока классифицируются по способу включения обмотки возбуждения. Различают двигатели независимого, параллельного, последовательного и смешанного возбуждения. Электрические схемы этих двигателей имеют такой же вид, как и схемы соответствующих генераторов. Отличие заключается в
том, что ток якоря Ia в двига-
телях независимого и последовательного возбуждения равен току сетевому току I , а в двигателях параллельного и смешанного возбуждения из сети потребляется и ток возбуждения Iв .
Энергетическая диаграмма двигателя параллель-
a
Рис. 5.1. Энергетическая диаграмма двигателя постоянного тока независимого возбуждения
ного возбуждения изображена на рис. 5.1. Первичная мощность Р1 является электрической и потребляется из питающей сети. За счет этой мощности покрываются потери на возбуждение рв и электрические
потери рэл.a Ia2Ra в цепи якоря, а оставшаяся часть составляет элек-
тромагнитную мощность якоря Pэм EaIa , которая превращается в механическую мощность Pэм Pмх . Потери магнитные рмг , добавоч-
ные рд и механические рмх покрываются за счет механической мощ-

ности, а остальная часть этой мощности представляет собой полезную механическую мощность P2 на валу.
Аналогичные энергетические диаграммы, иллюстрирующие преобразование энергии в двигателе, можно построить и для других типов двигателей.
Уравнение равновесия напряжений для цепи якоря. Для режима двигателя уравнение цепи якоря имеет вид:
U E Ia ra Uщ . |
(5.1) |
Упрощение уравнения (5.1) производится так же, как в генераторах и для приближенных расчетов его можно записать аналогично уравнению (4.3) в виде:
U E Ia ra . |
(5.2) |
Уравнения равновесия напряжений для цепи возбуждения не отличаются от аналогичных уравнений для генератора.
Уравнение баланса токов (для двигателей параллельного и смешанного возбуждения)
I Ia Iв . |
(5.3) |
Уравнение равновесия моментов. Электромагнитный момент двигателя
Mэм Pэм Cм Ia ,
который является вращающим, он уравновешивает тормозящие моменты:
- момент М0 , соответствующего потерям рмг , рд и рмх , по-
крываемым за счет механической мощности;
-М2 – полезный момент на валу, создаваемый рабочей машиной или механизмом;
-Мдин – динамического момента.
При этом
M2 P2 30 P2 .
n
Таким образом,
Мэм М0 М2 Мдин
или
Мэм Мст Мдин ,
где Мст М0 М2 – статический момент сопротивления.
При установившемся режиме работы, когда n const , Мдин 0,
М0 (pмех рмг рдоб )/ .
Определение суммы механических потерь и потерь в стали в режиме двигателя и разделение её на эти составляющие возможно из опыта холостого хода. При этом следует измерять напряжение на якоре и ток якоря.
Из измеренной таким образом мощности холостого хода
|
Р0 U0I0 |
следует вычесть по- |
||
|
тери |
в |
обмотке |
якоря |
|
P0 P0 I02Ra . Первый |
отсчёт |
||
|
можно сделать при номиналь- |
|||
|
ном |
напряжении а следующие |
||
|
при уменьшении примерно че- |
|||
|
рез 0,1Uн . |
|
|
|
|
|
Для разделения потерь хо- |
||
Рис. 5.2. Разделение потерь холостого хода |
лостого хода на составляющие, |
|||
|
если оно требуется, следует от- |
|||
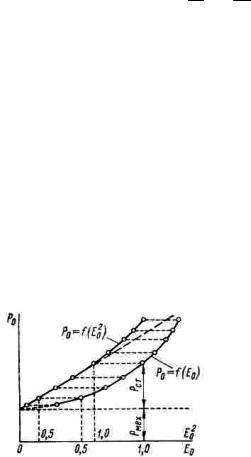
ложить на графике полученные таким образом потери P0 в зависимо-
сти от напряжения на выводах и экстраполировать их на нулевое значение последнего. Однако зачастую это представляет затруднение, особенно когда число отсчетов при малых напряжениях невелико; поэтому разделение потерь следует проводить методом, именуемым в литературе методом Деттмара, а именно откладывать потери в зависимости не от первой степени, а от квадрата ЭДС или напряжения холостого хода (рис. 5.2.). Благодаря этому точки, соответствующие отсче-
там при наиболее низких значениях напряжения, оказываются сильно приближенными к оси ординат, а так как при малых насыщениях магнитной цепи потери в стали примерно пропорциональны квадрату напряжения, то эти точки хорошо укладываются на прямую. Экстраполяция прямой при малых напряжениях до пересечения с осью ординат отсекает на последней механические потери.
Потери на трение щеток на коллекторе машин постоянного тока при холостом ходе больше, чем при нагрузке, так как их коэффициент трения убывает по мере увеличения плотности тока, однако никаких поправок для учета этого обстоятельства стандарты не предусматривают.
Уравнение частоты вращения двигателя можно получить из совместного решения уравнений (1.13) и (5.2). Из уравнения (5.2) следует, что
E U Ia Ra .
Подставляя сюда выражение частоты вращения из уравнения
(1.13), получим
|
(U Ia Ra) |
|
|
(5.4) |
|||||
|
|
||||||||
или |
|
|
|
cФ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
30 |
c(U I |
a |
R ) |
|
||||
n |
|
|
|
|
|
a |
. |
(5.5) |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
||||
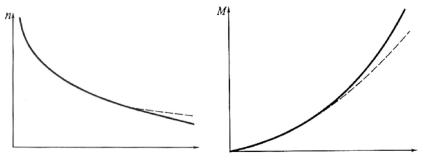
Характеристики двигателей независимого и параллельного возбуждения. Основными характеристиками, по которым оцениваются рабочие свойства двигателей, являются:
- скоростная характеристика, которая представляет зависимость частоты вращения от тока якоря, n f Ia ;
- моментная характеристика, которая представляет зависимость электромагнитного момента от тока якоря, M f Ia ;
- механическая характеристика, которая представляет зависимость частоты вращения от электромагнитного момента, n f M .
Все эти характеристики получают при постоянных значениях напряжения сети и тока возбуждения, обычно соответствующим своим номинальным значениям U Uном , Iв Iвном .
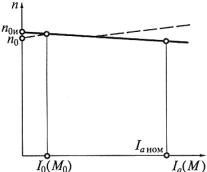
Скоростная характеристика n f Ia . Выражением для скоростной характеристики служит уравнение (5.5). Как следует из этого
уравнения, |
если магнитная |
цепь |
ненасыщена |
и магнитный поток |
const , |
то зависимость |
n Ia |
- линейная, и |
с ростом тока якоря |
частота вращения уменьшается. Этому случаю соответствует сплошная линия на рис. 5.3. Если поток якоря вызывает уменьшение потока возбуждения 0 , то в этом случае уравнение для скорости приобретает вид
n |
c1 U Ia Ra |
, |
(5.6) |
|
|||
|
0 |
|
|
где 0 – магнитный поток, соответствующий номинальному току возбуждения Iвном при холостом ходе двигателя; - уменьшение магнитного потока из-за размагничивающего действия реакции якоря.
|
Как |
следует из |
формулы |
|
(5.6), при возрастании тока якоря |
|
|||
падение |
напряжения |
Ia Ra |
|
|
уменьшает частоту вращения n, |
|
|||
а уменьшение потока увеличива- |
|
|||
ет ее. Характеристика в этом |
|
|||
случае будет идти выше, чем в |
|
|||
предыдущем случае, она показа- |
|
|||
на на рис. 5.3 штриховой линией. |
|
|||
Если |
относительное |
значение |
|
|
суммарного сопротивления цепи |
Рис. 5.3. Скоростная (механическая) |
|||
якоря |
больше относительного |
|||
значения |
уменьшения |
потока |
характеристика двигателя незави- |
|
Ra* , то частота враще- |
симого возбуждения |
|||
ния с ростом тока якоря будет уменьшаться. Если Ra* , то
частота вращения с ростом тока якоря будет увеличиваться и, как будет показано далее, такая характеpистика является неустойчивой.
Размагничивающее действие реакции якоря обычно начинается при токах якоря, превышающих 50..70 % номинального и скоростная
характеристика может иметь возрастающий характер (штриховая линия на рис. 5.3), начиная с этих значений токов.
Моментная характеристика M f Ia . Зависимость электромагнитного момента от тока якоря выражается формулой
M c Ia .
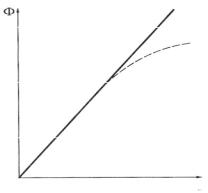
Как следует из этого уравнения, если магнитная цепь ненасыщена и магнитный поток const, то зависимость M Ia - линейная, и с ростом тока якоря пропорционально ему увеличивается электромагнитный момент. Моментная характеристика в этом случае представляет собой прямую линию выхо-
|
|
|
|
дящую |
из |
начала |
координат |
|||||
|
|
|
|
(сплошная линия на рис. 5.4). |
||||||||
|
|
|
|
|
Действительная |
момент- |
||||||
|
|
|
|
ная характеристика |
вследствие |
|||||||
|
|
|
|
уменьшения магнитного потока |
||||||||
|
|
|
|
из-за размагничивающего дей- |
||||||||
|
|
|
|
ствия |
|
реакции |
|
якоря |
||||
|
|
|
|
|
o пойдет |
ниже и |
||||||
|
|
|
|
будет отклоняться от линейной |
||||||||
|
|
Ia |
зависимости (штриховая линия |
|||||||||
|
|
на рис. 5.4). |
|
|
|
|||||||
|
|
|
|
|
Механическая |
характери- |
||||||
Рис. 5.4. Моментная характеристика |
стика n f M . Аналитическое |
|||||||||||
двигателя независимого (парал- |
выражение |
механической ха- |
||||||||||
лельного) возбуждения |
||||||||||||
рактеристики можно |
получить |
|||||||||||
|
|
|
|
|||||||||
из уравнения (5.6), если выразить в нем ток якоря |
Ia через электро- |
|||||||||||
магнитный момент из формулы (5.6). Тогда |
|
|
|
|
|
|||||||
|
Ia |
|
|
M |
|
|
|
|
(5.7) |
|||
|
с( o ) |
|
|
|
|
|
||||||
и |
|
|
|
|
|
|
|
|
||||
n |
c1U |
|
c1M Ra |
|
|
|
||||||
|
|
|
|
. |
|
|
(5.8) |
|||||
o |
c o |
|
|
|||||||||
Из уравнения (5.8) следует, что механическая характеристика двигателя имеет такой же вид, как и скоростная характеристика. Поэтому на рис. 5.3 скоростная характеристика в другом масштабе является механической характеристикой.
Работа двигателя при M 0 и Ia 0 называется идеальным хо-
лостым ходом. Согласно уравнению (5.6) частота вращения при идеальном холостом ходе равна
n0и |
с1U |
. |
(5.9) |
|
|||
|
0 |
|
|
В двигателях независимого возбуждения изменение частоты |
|||
вращения при переходе от холостого хода |
M M0 к номинальной |
||
нагрузке M Mном мало и составляет 2..5 %. Такие слабо падающие механические и скоростные характеристики называются жесткими.
Характеристики двигателя последовательного возбуждения.
Особенностью двигателя последовательного возбуждения является то, что его ток возбуждения равен току якоря Iв Ia , и поэтому для
вывода выражений, определяющих вид его характеристик, предварительно необходимо определить связь между магнитным потоком и током якоря Iв Ia . Эта зависимость - f Ia - носит название
магнитной характеристики и она приведена на рис. 5.5 Идеальная магнитная характеристика (без учета размагничи-
вающего действия реакции якоря и насыщения) показана на рис. 5.5 сплошной линией, а реальная (с учетом реакции якоря и насыщения) – штриховой.
Ia
Рис. 5.5. Магнитная характеристика двигателя последовательного возбуждения
Все характеристики двигателя последовательного возбуждения получают при постоянном напряжении питания
U Uном .
Скоростная характеристика n f Ia . Если в уравнение
(5.5) подставить зависимость потока от тока якоря в соответствии с магнитной характеристикой, то получим выражение для скоростной характеристики
двигателя. Сначала для упрощения анализа пренебрежем насыщением магнитной цепи и будем считать магнитную характеристику линейной:
c Ia |
(5.10) |
|
Ia |
|
|
|
|
|
Ia |
Рис. 5.6. Скоростная характеристика |
Рис. 5.7. Моментная характеристика |
||||||
двигателя последовательного воз- |
двигателя последовательного воз- |
||||||
буждения |
|
|
|
буждения |
|
||
Подставляя это выражение в уравнение (5.5), получим |
|
||||||
n |
c1(U Ia Ra) |
|
c1U |
|
c1 Ra |
. |
(5.11) |
c Ia |
c Ia |
|
|||||
|
|
|
c |
|
|||
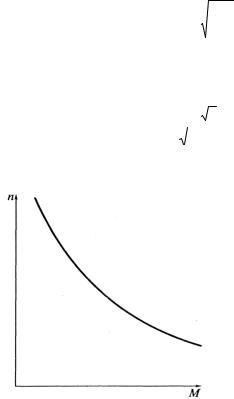
Из уравнения (5.11) следует, что скоростная характеристика имеет гиперболический характер (сплошная линия на рис. 5.6).
Особенностью скоростной характеристики двигателя последовательного возбуждения является ее большая крутизна в области малых значений тока якоря. Из уравнения (5.11) следует также, что ось ординат (ось скорости n) является для этой характеристики асимптотой. Реальная скоростная характеристика при учете размагничивающего действия реакции якоря будет отклоняться от гиперболической зависимости вверх, как показано штриховой линией на рис. 5.6.
Моментная характеристика M f Ia . Подставляя в формулу
для момента выражение (5.10), получим выражение для электромагнитного момента двигателя с последовательным возбуждением в виде
M cc Ia2 |
(5.12) |
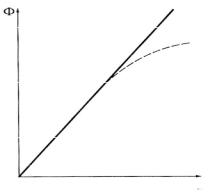
Из выражения (5.12) следует, что электромагнитный момент двигателя последовательного возбуждения пропорционален квадрату тока якоря, т.е. моментная характеристика имеет параболическую зависимость (сплошная линия на рис. 5.7).
С учетом размагничивающего действия реакции якоря момент в области больших токов будет меньше момента, получаемого по выражению (5.12), что вызвано уменьшением магнитного потока из-за размагничивающего действия реакции якоря. Это вызовет соответствующее уменьшение момента при больших токах (штриховая кривая на рис. 5.7).
Механическая характеристика n f M . Из выражения (5.12) ток якоря равен
Ia |
M |
|
|
|
. |
(5.13) |
|
cc |
|||
|
|
|
|
Тогда, подставив (5.13) в (5.11), получим аналитическое выражение для механической характеристики:
n |
Uc1 c |
|
|
c Ra |
. |
(5.14) |
|
|
|
|
|||||
|
|
c M |
|
|
c |
|
|
Из выражения (5.14) следует, что механическая характеристика двигателя последовательного возбуждения при U const так же как и его скоростная характеристика, имеет практически гиперболический характер (см.
рис. 5.8).
Особенностью механической характеристики двигателя последовательного возбуждения является ее большая крутизна в области малых значений тока якоря. Как следует из уравнения (5.14), ось ординат (ось скорости n) является асимптотой и для этой характеристики.
При M 0 частота вращения двигателя стремится к бесконечности. В этом случае говорят, что двигатель идет вразнос. Чрезмерное повышение частоты вращения опасно с точки зрения механической прочности якоря, так как из-за больших значений центробежных сил, возникающих в этом случае, может нарушиться целостность бандажей, удерживающих обмотку якоря в пазах, и может произойти разрушение коллектора. Поэтому нельзя допускать работу двигателя последовательного возбуждения при холостом ходе и при малых нагрузках. Обычно нагрузка не должна быть меньше 25..30 % номинальной. Лишь двигатели малой мощности (десятки ватт) допускают работу при
холостом ходе, так как их собственный момент потерь М0 достаточно
велик.
Вследствие сильной зависимости частоты вращения от нагрузки механические и скоростные характеристики двигателей последовательного возбуждения называют мягкими.
Характеристики двигателей смешанного возбуждения занимают промежуточное положение между соответствующими характеристиками двигателей параллельного и последовательного возбуждения. При слабой последовательной обмотке они будут приближаться к характеристикам двигателя параллельного возбуждения, а при сильной – к характеристикам двигателя последовательного возбуждения.
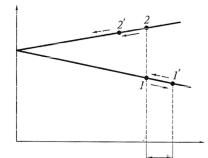
Условия устойчивой работы двигателей постоянного тока.
Важно, чтобы работа двигателя вместе с производственным механизмом протекала устойчиво. Под статически устойчивой работой двигателя понимается его способность вернуться в исходную точку равно-
весия после кратковременного |
|
|
||||
действия |
возмущающих |
сил, |
|
|
||
нарушивших |
это |
равновесие. |
|
|
||
Оценка устойчивости произво- |
|
|
||||
дится путем совместного рас- |
0 |
|
||||
|
|
|||||
смотрения механических харак- |
|
|
||||
теристик двигателя и приводи- |
|
|
||||
мого им в движение производст- |
|
|
||||
венного механизма. |
|
|
Mc |
M |
||
Рассмотрим работу двига- |
||||||
теля независимого возбуждения, |
|
Mc |
||||
механические |
характеристики |
Рис. 5.9. К анализу устойчивости |
||||
которого могут быть как возрас- |
работы двигателя постоянного тока |
|||||
тающими, |
так |
и |
падающими |
|
|
|
(рис. 5.3). Пусть |
момент |
сопротивления не зависит от |
скорости |
|||