

Лекции / Лекция 16 Регулирование частоты вращения АД
.pdfРегулирование частоты вращения АД
Возможные способы регулирования частоты вращения. Су-
ществует два возможных метода регулирования частоты вращения асинхронных двигателей: изменением частоты вращения n1 магнитно-
го поля или величины скольжения s . Изменение частоты вращения поля n1 осуществляют двумя способами: изменением частоты f1 тока, подаваемого на обмотку статора, или изменением числа полюсов машины 2p. Изменение скольжения s при заданном нагрузочном
моменте M MH можно осуществить путем изменения питающего напряжения U1 , введения в цепь ротора добавочного активного со-
противления (в двигателях с фазным ротором) или подключения обмотки ротора к добавочному источнику электрической энергии с из-
меняющейся частотой f2 (в двигателях двойного питания и в асин-
хронных каскадах). При изменении питающего напряжения и введении в цепь ротора добавочного активного сопротивления мощность
скольжения sPЭМ целиком выделяется в цепи ротора в виде теплоты.
При подключении обмотки ротора к добавочному источнику электри-
ческой энергии мощность скольжения sРЭМ в основном поступает от
этого источника и в цепи ротора теряется только мощностьm2I22r2 .
Для изменения направления вращения ротора необходимо изменить направление вращения магнитного поля. В трехфазных машинах это осуществляют изменением чередования фаз, для чего переключают два провода, подводящие ток из сети к двум любым фазам обмотки статора.
Регулирование частоты вращения изменением частоты f1.
Этот способ регулирования частоты вращения позволяет применять наиболее надежные и дешевые асинхронные двигатели с короткозамкнутым ротором. Однако для изменения частоты питающего напряжения требуется наличие источника электрического тока переменной частоты. В качестве последнего используют либо синхронные генераторы с переменной частотой вращения, либо преобразователи частоты: электромашинные или статические, выполненные на управляемых полупроводниковых вентилях (тиристорах и транзисторах).
Зависимость максимального момента от напряжения и частоты выражается формулой

|
|
|
|
pmU2 |
|
|
|
|
||
Mm |
|
|
|
1 |
1 |
|
|
. |
(2.56) |
|
|
r |
|
|
|
|
|
|
|||
4 f |
|
r2 |
x x |
|
||||||
|
2 |
2 |
|
|||||||
|
|
1 1 |
1 |
1 2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
или, пренебрегая в (2.56) значением r1 в знаменателе и выражая
x1 2 f1L1 , x2 2 f1L1 ,
получаем
|
|
pm U |
2 |
|
|
|
|
pm U |
2 |
|
|
|
cU |
2 |
|
|||||
M m |
|
|
|
1 |
1 |
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
1 |
, (2.57) |
4 f |
1 |
x x |
|
8 |
2 f |
2 |
L L |
f |
|
2 |
||||||||||
|
|
|
1 |
2 |
|
|
|
|
|
1 |
1 |
1 |
|
|
|
1 |
|
|||
где c– постоянная; L1 и L2 – индуктивности рассеяния обмоток статора и ротора.
Из (2.57) следует, что при изменении частоты f1, одновременно
с частотой вращения изменяется и максимальный момент, т.е. перегрузочная способность двигателя (отношение максимального момента
Mm к номинальному моменту Mн ). Для устойчивости работы двига-
теля необходимо обеспечить достаточную перегрузочную способность
Mm Kп . Следовательно, при частотном регулировании должно быть
Mн
обеспечено условие:
Mm1 Mm2 const,
Mн1 Mн2
где индексы «1» и «2» относятся к различным частотам вращения; Mн1 и Mн2 – нагрузочные моменты при этих частотах. Так как согласно (2.57)
M |
m1 |
U11 f1 2 2 |
|
|||
|
|
|
|
|
, |
|
M |
|
|
f |
|||
m2 |
U |
|
|
|||
|
|
1 2 11 |
|
|||

то получаем основной закон частотного регулирования:
U1 2 |
|
f1 2 |
|
Mm 2 |
(2.58) |
U11 |
f11 |
|
Mm 1 |
||
|
|
|
Этот закон впервые сформулирован академиком М.П. Костенко. Если требуется регулировать частоту вращения при постоянном нагру-
зочном моменте (Mc const ), то уравнение (2.58) принимает вид
U1 2 |
|
f1 2 |
const, |
(2.59) |
|
U1 1 |
f1 1 |
||||
|
|
|
т.е. питающее напряжение следует изменять прямо пропорционально его частоте. При этом мощность двигателя увеличивается прямо пропорционально возрастанию частоты вращения.
Механические характеристики двигателя при регулировании с Mm const даны на рис. 2.61, а.
Если регулирование происходит с постоянной полезной мощно-
стью P2 , то момент Mm должен изменяться обратно пропорциональ-
но частоте вращения, а, следовательно, и f1:
M |
m 2 |
|
2 |
|
|
|
|
|
|
||
|
|
|
|
const, |
|
||||||
M |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||
|
|
m 1 |
1 |
|
|
|
|
|
|
||
|
Mm 2 |
|
|
(1) |
|
f1 1 |
. |
(2.60) |
|||
|
Mm 1 |
|
(2) |
|
|||||||
|
|
|
|
|
f1 2 |
|
|||||
Подставляя (2.60) в (2.59), получаем закон изменения напряжения при регулировании с постоянной мощностью
U1 2 |
|
f1 2 |
.(2.61) |
|
U1 1 |
f1 1 |
|||
|
|
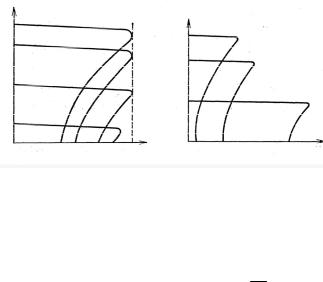
Механические характеристики для этого случая показаны на рис. 2.61, б.
f1(2) f1(1) |
f 1(1) |
|
f 1(2) f 1(1) |
||
f1(3) f1(2) |
||
f1(4) f1(3) |
f 1(3) f 1(2) |
|
|
а |
M |
б |
|
||
Рис. 2.61. Механические характеристики асинхронного двигателя |
||
при различных значениях f1 и M const (a), |
P2 const(б) |
|
Соотношения (2.59) и (2.61) являются приближенными, так как не учитывают влияния сопротивления r1 на Mm , что наиболее сильно
проявляется при малых частотах f , Поэтому при U1 |
const макси- |
||
1 |
|
f |
1 |
n |
n |
|
|
f 1(1) |
|
|
|
мальный момент Mm в зоне малых частот будет уменьшаться (рис.
2.61, а). Влияние этого сопротивления можно установить по упрощенной круговой диаграмме (рис. 2.62), диаметр которой при условии
|
U1 |
const остается неизменным. В этом случае при номинальной |
|
f |
|||
|
1 |
частоте линия моментов ОТ образует с диаметром окружности уголн , тангенс которого
tg н r1 / x1 x2 r1 / 2 f1н L1 L2 .
При пониженной частоте
tg н r1 / 2 f 1н L1 L2
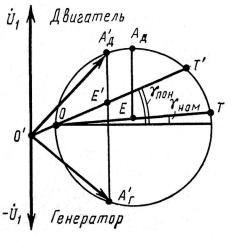
Рис. 2.62.Упрощенная круговая диаграмма при регулировании
и линия моментов ОТ проходит существенно выше, что снижает значение максимального
момента (отрезок A |
E A |
Д |
E ). Увеличение частоты сверх |
f |
Д |
|
|
1H |
мало сказывается на максимальном моменте, так как угол H обычно мал.
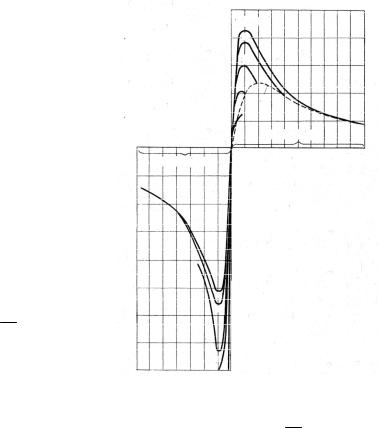
На рис. 2.63 изображены зависимости величины электромагнитного мо-
мента M в отно-
сительных единицах от частоты
f2S тока в роторе
при различных значениях частоты питающего на-
пряжения f1, по-
строенные для асинхронного двигателя мощностью 100 кВт при законе регулирования
U1 const . В f 1
двигательном режиме максимальный момент существенно снижается при уменьшении частоты из–за возрастающего влияния падения напряжения в актив-
Мх f 100 гц
2,0 50
1,5 20
1,0 10
|
0,5 |
5 |
Двигатель |
|
|
|
f2 |
50 40302010 |
|
|
|
||
|
Генератор |
0 |
20 40 60 |
80 f |
2 |
,гц |
|
|
|
|
|
0,5
1,0
1,5
2,0
2,5
50 3,0
20 3,5
10 гц 5гц
Рис. 2.63. Зависимости M f ( f2) при
регулировании по условию U1 const при f1
различных значений частоты f1
ном сопротивлении статора I1r1, что приводит к уменьшению ЭДС
E1 и магнитного потока двигателя. В генераторном режиме максимальный момент с понижением частоты возрастает, что объясняется обратным влиянием падения напряжения I1r1 (см. отрезок AГ Е на
рис. 2.62). При этом магнитный поток двигателя увеличивается. Такие характеристики в генераторном режиме нежелательны, так как при малых частотах резко возрастает электромагнитный момент, что может вызвать поломку вала машины.
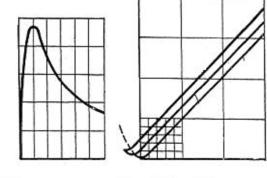
Часто регулирование двигателя осуществляется по закону постоянства магнитного потока. Электромагнитный момент асинхронного
двигателя при заданной частоте f2 тока в роторе пропорционален квадрату магнитного потока:
M cm mI2 cos 2 cm mE2S R2 / R22 x22S c 2m .
Поэтому для поддержания максимального момента неизменным требуется иметь постоянный магнитный поток, т.е. при регулировании
частоты должно соблюдаться условие |
|
E1 |
const . В этом случае зна- |
|||||
|
|
f |
||||||
|
|
|
|
|
|
1 |
|
|
чение момента определяется только частотой ротора f2 |
(рис. 2.64, a) |
|||||||
и оно одинаково в двигательном и тормозном режимах. |
|
|||||||
Для обеспечения неизменного магнитного потока питающее на- |
||||||||
пряжение U1 должноизменяться так, чтобы выполнялось условие |
||||||||
|
|
jI X |
1 |
|
|
|
||
U |
I |
R |
1 |
const |
|
|||
|
|
|
||||||
1 |
1 |
1 |
f1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Но так как ЭДС E и реактивное сопротивление |
x1 пропорцио- |
|||||||
нальны частоте f1, а активное сопротивление r1 от частоты f2 не за-
висит, то напряжение U1 должно изменяться по закону
U1 a bf1,
где a и b – постоянные.
На рис. 2.64, б показаны графики изменения напряжения
U1 от частоты f1, необходи-
а |
М/Мном |
U1 |
|
|
б |
|
4 |
|
f2 |
5Гц |
|
||
3 |
|
0 |
||||
|
Генера |
|
|
|
||
2 |
|
|
|
|
||
|
торный |
|
2,5 |
|
||
|
|
режим |
|
|
||
1 |
|
|
Двига - |
|
||
|
|
тельный |
|
|||
0 |
|
|
режим |
|
||
20406080 f2 ,Гц 0 |
10 |
20 |
f1 ,Гц |
|||
|
||||||
Рис. 2.64. Зависимости:
a – M f (f2 ); б – U1 f ( f1)
при регулировании по условию m const

мые для обеспечения указанного закона регулирования при заданных зна-
чениях частоты ротора f2 , т.е. электромагнитного момента. Получить
такую зависимость в электромашинных преобразователях частоты и синхронных генераторах спеременнойчастотойвращения весьма трудно, так как у них ЭДС пропорциональна частоте. Более гибким является регулирование при питании электродвигателя от статического преобразователя частоты, так как в этом случае напряжение при регулировании U1 и час-
тота f1 могут изменяться полюбомутребующемуся закону.
Регулирование частоты вращения изменением числапар по-
люсов Угловая скорость магнитного поля в асинхронном двигателе, а, следовательно, и угловая скорость ротора обратно пропорциональна числу пар полюсов. Изменяя число пар полюсов, можно регулировать скорость. Число пар полюсов зависит от шага и схемы соединения обмотки статора.
Ф
Катушки
Ф |
бб |
а |
p 2
Р=2 p 1 Р=1
Рис. 2.65. Схемы включения обмотки статора на различное число полюсов
Для регулирования угловой скорости на статоре в общих пазах можно разместить не одну, а две обмотки, имеющие различные шаги, а, следовательно, и различное число пар полюсов. В зависимости от необходимой скорости в сеть подключается та или иная обмотка. Этот способ применяется сравнительно редко, так как он имеет существенный недостаток – плохое использование обмоточного провода (всегда работает только одна из обмоток).
Более часто изменение числа пар полюсов достигается изменением (переключением) схемы соединения уложенной на статоре обмотки. Принцип такого переключения поясняется на рис. 2.65. При переходе с последовательного соединения двух катушек (рис. 2.65, a)

на параллельное соединение (рис. 2.65, б) число пар полюсов изменяется с 2 на 1.
При наличии фазной обмотки на роторе ее также следует переключать одновременно с обмоткой статора. Поэтому обмотку ротора у таких двигателей выполняют короткозамкнутой. Асинхронные двигатели с переключением числа пар полюсов называют многоскоростными. Они выпускаются на две, три и четыре угловые скорости. Известно
большое число схем, позволяю- U1л U1л щих осуществлять переключение
бчисла пар полюсов. Эти схемы разделяются на схемы регулирования с постоянным моментом и
I1 I1
yy I1
2p
Рис. 2.66. Принципиальная схема соедин тки статора с переключением числа полю отношении 2:1 при M const
схемы регулирования с постоянной мощностью.
Для примера на рис. 2.66 и 2.67 представлены наиболее часто
применяемые схемы соединения обмоток с переключением числа пар полюсов в отношении 2:1. Обмотки каждой фазы состоят из двух одинаковых частей. При анализе этих схем примем, что при U1Л const номинальный ток в
каждой части фазы I1Ф , КПД и cos двигателя при обеих часто-
тах вращения будут одинаковыми.
На рис. 2.66, a, обечастифазы соединены последовательно, а фазы между собой – в звезду. На рис. 2.66, бполовины каждой фазы соединены параллельно, образуя двойную звезду YY . С учетом принятых допущениймощностина валусоответственнобудутравны:
P2a 
 3U1Л I1 cos 1; P2б
3U1Л I1 cos 1; P2б 
 3U1Л 2I1 cos 1 ;
3U1Л 2I1 cos 1 ;
откуда
P |
|
M |
|
a |
|
|
|
2 б |
|
|
a |
2 |
(2.62) |
||
P |
M |
|
б |
||||
|
|
|
|||||
2 a |
|
|
б |
|
|

Мощность P2 б соответствует меньшему числу пар полюсов и
большей в 2 раза угловой скорости. Мощность P2 a соответствует
большему числу пар полюсов и меньшей угловой скорости.
Как следует из (2.62), при переходе от меньшей скорости (рис. 2.66, a) к большей (рис. 2.66, б) допустимая мощность на валу увеличивается в 2 раза. Вращающий момент в том и другом случае сохраняется неизменным
|
M a M б . |
a |
U |
1л |
б |
U1л |
|||
|
|
|
|
|
|
|
|||
Поэтому |
рассмат- |
|
|
|
|
|
|||
риваемая |
схема |
пере- |
|
|
|
|
|
||
ключения |
Y /YY |
(рис. |
I1 |
|
|
|
|
||
2.66) |
носит |
название |
|
|
|
I1 |
|||
схемы |
переключения с |
|
|
|
|
|
|||
постоянным моментом. |
|
|
|
|
|
||||
На рис. 2.67 пока- |
|
|
|
|
|
||||
зана |
принципиальная |
|
|
|
YY |
I1 |
|||
схема |
пересоединения |
|
|
|
|
||||
|
|
|
|
|
|||||
обмотки статора для из- |
|
|
|
|
|
||||
менения числа |
полюсов |
|
2p |
|
p |
||||
при постоянной мощно- |
|
|
|||||||
сти. На рис. 2.67, a две |
Рис. 2.67. Схема соединений обмотки статора с |
||||||||
половины |
каждой |
фазы |
переключением числа полюсов в отношении 2:1 |
||||||
соединяют |
последова- |
|
|
при P2 |
const |
|
|||
тельно, а фазы между собой – в треугольник. На рис. 2.67, б половины фаз соединяются па-
раллельно, образуя двойную звезду. Соединение по рис. 2.67, a соответствует большему числу пар полюсов и меньшей угловой скорости, а соединение по рис. 2.67, б – меньшему числу пар полюсов и большей угловой скорости.
Соответственно мощности на валу для этих схем
P2a 3U1Л I1 cos 1 ; P2б 
 3U1Л 2I1 cos 1;
3U1Л 2I1 cos 1;
откуда