

Прямоугольные (Декартовы) координаты на прямой, на плоскости и в пространстве. Косоугольные системы координат.
Прямую линию с указанным на ней направлением, началом отчета и единицей масштаба назовем числовой осью. Каждому действительному числу Х на числовой оси соответствует единственное число, которое называется координатой данной точки.
![]()
Здесь числа х2>х1>0, х3<0.
х3, х1, х2, х - координаты точек Q, F, N, M соответственно. Записывают:
Q (х3), F (x1), N(x2), M (x).
Точки F и N ограничивают отрезок FN. Очевидно, его длина | FN | = х2- х1. Две взаимно перпендикулярные оси на плоскости с общим началом и одинаковой единицей масштаба образуют декартову прямоугольную систему координат на плоскости. Одна из осей - ось абсцисс Ох, другая - ось ординат Оу.
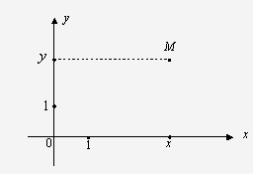
Каждой точке плоскости соответствует единственная пара чисел х, у.
x, у называют координатами точки М и записывают М (х, у).
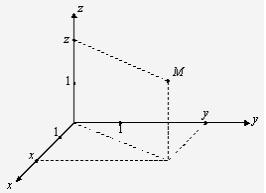
В пространстве декартова прямоугольная система координат представляет собой совокупность трех взаимно перпендикулярных осей с общим началом и одинаковой единицей масштаба. Это ось абсцисс Ох, ось ординат Оу и ось аппликат Оz. Каждая точка пространства М имеет координаты х, у, z. Записывают:М (х, у, z).
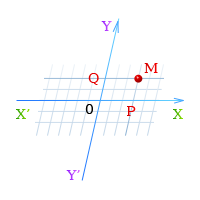
Косоугольная система координат (она наиболее сходна с прямоугольной) строится так: Проводятся две не перпендикулярные прямые X`X,Y`Y (оси координат), а дальше поступают также, как и при построении прямоугольной системы координат. |
Т.е. положение точки M на плоскости в косоугольной системе координат определяется так. Проводим MP||Y`Y до пересечения с осью X`X в точке P и MQ||X`X до пересечения с осью Y`Y в точке Q, см. рисунок.
Расстояние между двумя точками прямой, плоскости и в пространстве.
Всякой паре точек, например, А и В на координатной прямой соответствует пара чисел х1 и х2. Найти расстояние между точками можно по формуле: р(А,В)=sqrt(xb-xa)
Расстояние между двумя точками
![]()
где ![]() и
и ![]() радиус-векторы
точек
радиус-векторы
точек ![]() и
и ![]() .
.
В координатах:
на
прямой ![]()
на
плоскости ![]()
в
пространстве ![]()
Деление отрезка в заданном отношении
Если
точка М(x; y) лежит на прямой, проходящей
через две данные точки ![]() (
(![]() ,
, ![]() )
и
)
и ![]() (
(![]() ,
, ![]() ),
и дано отношение
),
и дано отношение ![]() ,
в котором точка М делит отрезок
,
в котором точка М делит отрезок ![]() ,
то координаты точки М определяются по
формулам
,
то координаты точки М определяются по
формулам
![]() ,
, ![]() .
.
Если точка М является серединой отрезка , то ее координаты определяются по формулам
![]() ,
, ![]() .
.
Полярная система координат. Сферическая система координат.
Полярная система координат. Полярная система координат задается точкой О, которая называется полюсом, лучом Ор, который называется полярной осью и единичным вектором е, того же направления что и полярная ось. Если мы возьмем на плоскости точку М, не совпадающую с О. Ее положение определяется двумя числами: ее расстоянием до r от полюса О и углом фи, который образован отрезком ОМ с полярной осью(Ор)(отсчет углов ведется по направлению противоположенному движению часовой стрелки.).
Числа rи фи- называются полярными координатами точки М. r- полярный радиус, фи- полярный угол.Чтобы получить все точки плоскости, достаточно ограничить полярный угол промежутком
Для
введения сферической системы координат
в пространстве выбирается плоскость
(основная
плоскость)
и на ней задается полярная 1система
координат с полюсом ![]() (начало
сферической системы координат) и
полярной осью
(начало
сферической системы координат) и
полярной осью ![]() .
Через точку
перпендикулярно
основной плоскости проведем ось
.
Через точку
перпендикулярно
основной плоскости проведем ось ![]() (ось
аппликат)
и выберем ее направление так, чтобы
возрастание полярного угла со стороны
положительного направления
оси
происходило
против часовой стрелки (рис.2.36,а).
(ось
аппликат)
и выберем ее направление так, чтобы
возрастание полярного угла со стороны
положительного направления
оси
происходило
против часовой стрелки (рис.2.36,а).
В
сферической системе координат положение
точки ![]() ,
не лежащей на оси аппликат, характеризуется
расстоянием
,
не лежащей на оси аппликат, характеризуется
расстоянием ![]() до
начала координат, полярным углом
до
начала координат, полярным углом ![]() точки
точки ![]() -
ортогональной проекции точки
на
основную плоскость, и углом
-
ортогональной проекции точки
на
основную плоскость, и углом ![]() между
вектором
между
вектором ![]() и
положительным направлением оси аппликат.
Таким образом, сферические координаты
точки
-
это упорядоченная тройка
чисел
и
положительным направлением оси аппликат.
Таким образом, сферические координаты
точки
-
это упорядоченная тройка
чисел ![]() – радиус
– радиус ![]() , долгота
, долгота ![]() и широта
и широта ![]() .
У точек, принадлежащих оси аппликат,
не определена долгота, их положение
задается радиусом
.
У точек, принадлежащих оси аппликат,
не определена долгота, их положение
задается радиусом ![]() и
широтой
и
широтой ![]() для
положительной части оси
и
для
положительной части оси
и ![]() для
отрицательной ее части. Начало координат
задается нулевым значением радиуса
.
Иногда вместо угла
широтой
называют угол
для
отрицательной ее части. Начало координат
задается нулевым значением радиуса
.
Иногда вместо угла
широтой
называют угол ![]() ,
принимающий значения
,
принимающий значения ![]()
Со
сферической системой координат ![]() можно
связать прямоугольную систему
координат
можно
связать прямоугольную систему
координат ![]() (рис.2.36,б),
у которой начало и базисные
векторы
(рис.2.36,б),
у которой начало и базисные
векторы ![]() совпадают
с началом сферической системы координат
и единичными векторами на полярной
оси
и
оси 5аппликат
соответственно,
а базисный вектор
совпадают
с началом сферической системы координат
и единичными векторами на полярной
оси
и
оси 5аппликат
соответственно,
а базисный вектор ![]() выбирается
так, чтобы тройка
выбирается
так, чтобы тройка ![]() была
правой (при этом базис оказывается
стандартным).
была
правой (при этом базис оказывается
стандартным).
Наоборот, если в пространстве задана правая прямоугольная система координат, то, приняв положительную полуось абсцисс за полярную ось, получим сферическую систему координат (связанную с данной прямоугольной).