


ВСТУП
Основним завданням при проектуванні підйомних машин є створення таких машин, які були б досить продуктивними і надійними в роботі, споживали незначну кількість енергії і виконували підйомні операції із заданою точністю. Усі перераховані характеристики можуть бути досягнуті за рахунок вибору їхніх оптимальних конструктивних параметрів, а також оптимальних режимів і параметрів руху приводного механізму.
Під підйомною машиною розуміється електромеханічна система, що служить для підйому вантажу або людей, має канати, орган навивання (барабан чи шків тертя), підйомні посудини (скіпи, кліті, вагони, кабіни й ін.) чи причіпні пристрої, електропривод, гальма і системи керування.
Одним із шляхів підвищення продуктивності підйомних операцій є інтенсифікація періодів розгону, зупинки і сталого руху підйомної машини. Однак при цьому в її елементах різко зростають додаткові динамічні навантаження коливального характеру, які необхідно зменшувати до мінімально можливої величини. Для вирішення поставленої задачі необхідні теоретичні й експериментальні дослідження з вивчення силових перехідних процесів у головній лінії передач підйомних машин і розробка методів і способів, що забезпечують створення динамічно досконалих підйомних машин.
Одним із шляхів вирішення цієї проблеми є введення в головну лінію передач підйомної машини різних поглиначів і гасителів коливань і вибір оптимальних параметрів жорсткості, інерційності і дисипації, за рахунок яких мінімізуються динамічні навантаження у валопроводі і канатопроводі. Останнє дозволяє підвищити загальний рівень стаціонарних навантажень і реалізувати ступінчасті зовнішні збурення від приводного механізму і підвищити швидкодію підйомних машин.
Іншим напрямком зниження динамічних навантажень у валопроводі і канатопроводі підйомної машини є вибір режимів руху приводного механізму і режимних параметрів. Цілеспрямований вибір режимів руху і режимних параметрів дозволяє знизити енергетичні витрати і використовувати привод меншої потужності.
Для оптимізації режимів руху і режимних параметрів необхідна кількісна оцінка перехідних процесів і сталого руху за весь період підйому у вигляді одного критерія чи системи критеріїв. В такому разі слід використовувати локальні й інтегральні динамічні критерії, отримані на основі функціонала дії і варіаційних принципів механіки. Ці критерії відображають небажані властивості, якими характеризується підйомна машина в період руху, тому мають мінімізуватися. Інтегральні функціонали (критерії) залежать від різних функцій і параметрів режимів руху. Відповідний вибір цих залежностей і параметрів дозволяє мінімізувати функціонали і поліпшити ті чи інші властивості машини.
ЗМІСТ
Розділ 1. Аналіз науково-технічної інформації……………………………….4
1.1 Аналіз інформації за літературними джерелами……………….………....4
1.2 Аналіз інформації з інтернету…………………………………….………..6
Висновок………………………………………………………….…….……….10
Розділ 2. Опис об’єкту дослідження…………...………………..…………….10
2.1 Будова і принцип дії…………………………………………….………….10
2.2 Циклограма роботи пристрою………………………………………..……14
2.3 Технологічна система застосування пристрою……………….…………..15
Розділ 3. Моделювання функціонування пристрою…………….……...…….17
3.1 Методико-математична модель…………………………….…….……..…17
3.2 Розрахунки та побудова графіків…………………………….…………….25
Висновки……………………………………………….……………….………..36
Перелік посилань…………………………………..…………………………….37
РОЗДІЛ 1. АНАЛІЗ НАУКОВО – ТЕХНІЧНОЇ ІНФОРМАЦІЇ
1.1 Аналіз інформації за літературними джерелами
У підйомних машинах розглядаються силові процеси, що включають: зовнішні збурення, силові стаціонарні сталі і несталі (коливальні) процеси, що діють у головній лінії передач. Ці силові процеси взаємозалежні, однак для кожного процесу можуть бути виділені найбільш характерні критерії якості, що повною мірою характеризують той чи інший процес. За цими критеріями може проводитися оптимальний техніко-економічннй синтез підйомних машин. Оптимальним силовим процесам відповідають оптимальні режими руху і конструктивні параметри підйомних машин. Під оптимальними силовими процесами будемо розуміти такі, яким відповідає екстремальне (мінімальне чи максимальне) значення деякого критерію, представленого у вигляді функціонала (функції, що залежить від функції) цілі.
Нестаціонарні силові процеси в головній лінії передач підйомної машини можуть бути визначені декількома показниками якості [5]: темпом загасання коливань - критерії узагальнений декремент коливань" і швидкість загасання коливань"; максимальною амплітудою коливань - критерії коефіцієнт динамічності" і максимальне відхилення; ступенем наближення коливального процесу до бажаного процесу — критерії інтегральне квадратичне відхилення і абсолютне максимальне відхилення"; тривалістю загасання коливань - критерій час загасань; ступенем впливу на працездатність різних вузлів - критерії втрата втомної міцності і зниження довговічності; витратами механічних засобів - критерії у вигляді дій [12], що можуть бути представлені критеріальними діями, питомими діями, безрозмірними питомими діями і коефіцієнтами корисної дії за різними мірами руху чи впливу.
Стаціонарні силові процеси в головній лінії передач оцінюються за різницею припустимого і дійсного навантажень у ланках критерієм "резерв міцності" [1].
Аналіз проведених досліджень за допомогою розглянутих критеріїв показує, що останні досягають мінімальних значень усередині чи на границі області припустимих значень варійованих параметрів [3].
Від закону зміни зовнішніх впливів, що діють на головну лінію передач з боку електродвигуна, залежить вартість електроустаткування і споживаної електроенергії, час циклу роботи підйомної машини й ін. і, як результат, продуктивність, надійність і економічність підйомної установки. Зовнішні збурення оцінюються декількома показниками якості: вартістю однієї тонни вантажу, що піднімається, — критерій "питомі приведені витрати"; тривалістю роботи підйомної установки - критерій "час циклу"; величиною ефективної потужності електродвигуна — критерій "ефективна потужність"; темпом загасання коливань — критерій " швидкість загасань"; максимальною амплітудою коливань - критерій " коефіцієнт динамічності" [10] і ін.
При встановленні закону зміни зовнішніх впливів апріорі приймається, що сучасний електропривод може реалізувати такі керування підйомною машиною, що забезпечують у часі і діаграму швидкості V у вигляді криволінійної трапеції (рис. 1.1). При цьому бічні сторони цієї трапеції можуть бути представлені прямими лініями 1, параболами 2 чи кривими більш високих порядків 3. У свою чергу, одному із зазначених законів зміни швидкості у вигляді прямолінійної трапеції відповідають постійні, прикладені ступінчасто зовнішні збурення (рис. 1.2), що задовольняють при обмеженнях на режимні, параметри умові максимальної швидкодії механічної системи по керуванню
[5, 7,8, 12].
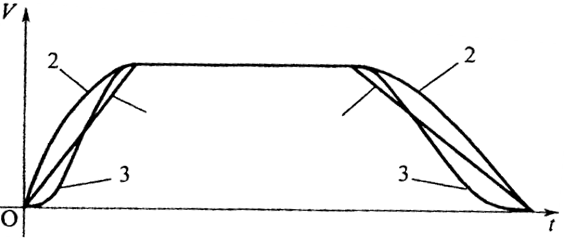
Рис. 1.1. Можливі діаграми швидкості підйомної машини
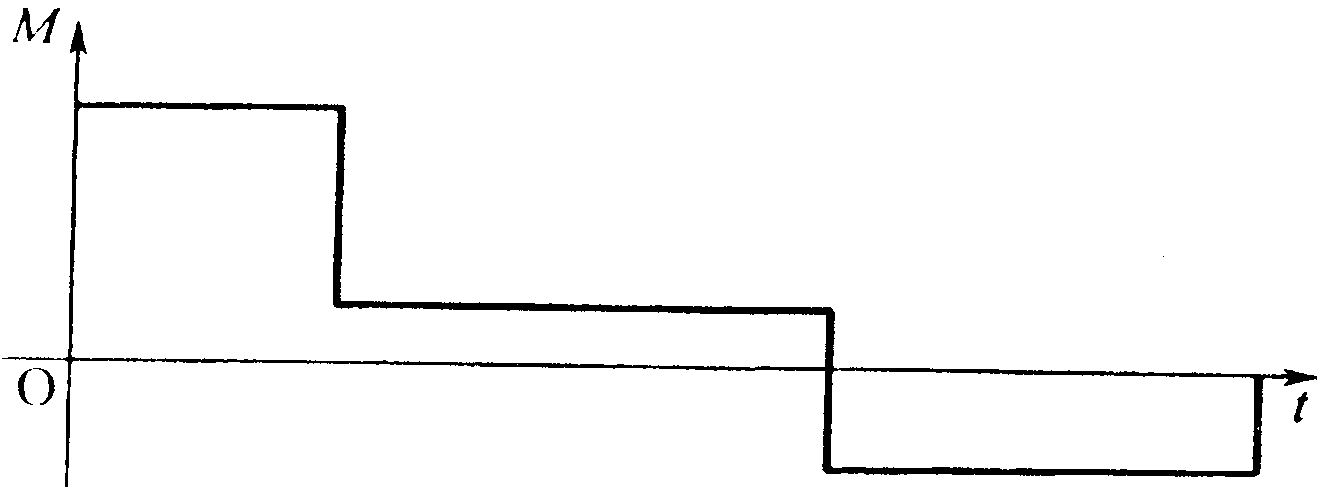
Рис. 1.2. Постійні, прикладені ступінчасто, зовнішні збурення
Можливість реалізації такого типу збурень визначається у першу чергу можливістю зменшення коливань силового перехідного процесу в ланках лінії передач за рахунок підбору оптимальних динамічних параметрів (жорсткісних, інерційних і дисипативних), що відповідають мінімальному коефіцієнту динамічності і максимальній швидкості загасання коливань [5].