

Тема: Проектування цифрового автомата з пам'яттю
Мета: Навчитися проектувати цифрові автомати з пам'яттю
Завдання: Спроектувати цифровий автомат Мілі згідно заданих таблиць переходів і виходів. Комбінаційну схему збудження і комбінаційну схему формування вихідних сигналів реалізувати в заданому базисі І-НІ тип триггера – JK
Вхідні дані:
Таблиця 1 - Таблиця переходів
-
Вхідні дані
Стан автомата
S1
S2
S3
S4
S5
X1
S5
-
S2
S1
S4
X2
S2
S1
S5
S3
S1
X3
S3
S3
-
-
S5
X4
S5
S1
S4
S2
-
Таблиця 2 - Таблиця виходів
-
Вихідні дані
Стан автомата
S1
S2
S3
S4
S5
X1
Y6
-
Y5
Y6
Y2
X2
Y1
Y2
Y4
Y1
Y2
X3
Y3
Y2
-
-
Y5
X4
Y6
Y1
Y2
Y1
-
Зміст
|
Тема. Мета. Завдання. Вхідні дані. |
2 |
|
Зміст |
3 |
1 |
Теоретичні відомості |
4 |
2 |
Порядок виконання роботи |
6 |
2.1 |
Кодування |
6 |
2.2 |
Вибір елементів пам'яті автомата |
7 |
2.3 |
Побудова функії збудження триггеру |
8 |
2.4 |
Мінімізація функії збудження триггеру |
9 |
2.5 2.6 2.7 |
Побудова комбінаційної схеми №1 Мінімізація функцій виходів Побудова комбінаційної схеми №2 |
11 12 13 |
|
Висновки |
14 |
|
Література |
15 |
1. Теоретичні відомості
Вузли і пристрої, які містять елементи пам’яті відносяться до класу автоматів з пам’яттю.
Цифровий автомат – це пристрій, який здійснює приймання, зберігання і перетворення дискретної інформації за деяким алгоритмом.
Абстрактний цифровий автомат A визначається сукупністю п’яти
об’єктів {X, S, Y, ϕ, λ}, де X = { хi }, i Є1, m – множина вхідних сигналів
автомата А (вхідний алфавіт автомата А); S = { sj } , j Є 1, n – множина станів автомата А (алфавіт станів автомата А); Y = { yk } , k Є 1, l – множина вихідних сигналів автомата А (вихідний алфавіт автомата А); ϕ – функція переходів автомата А, яка відображає (X*S)→S, тобто ставить у відповідність будь-якій парі елементів добутку множин (X*S) елемент множини S; λ – функція виходів автомата А, яка задає відображення (X*S)→Y або S→Y.
За способом формування функції виходів розрізняють наступні типи
автоматів: автомат Мілі, автомат Мура.
Розрізняють два класи автоматів : Асинхроні та синхроні. Синхронний автомат характеризується тим, що функціонує під управлінням тактових сигналів – ТС, з постійною тривалістю tTC та постійною частотой FTC, якщо кантування часу рівномірне . В асинхронних автоматах тривалість інтервалу часу протягом якого залишається незмінним стан вхідних сигналів, являєтся величиной зміной та определяется часом, який необхідно автомату для встановлення відповідних вихідних сигналів и завершеня переходу в новий стан.
В абстрактному автоматі Мілі функція виходів λ задає відображення:
(X*S)→Y.
Автомат Мілі характеризується системою рівнянь:
y(t) = λ[s(t),x(t)];
s(t +1) = ϕ[s(t),x(t)].
Автомат Мура – системою рівнянь:
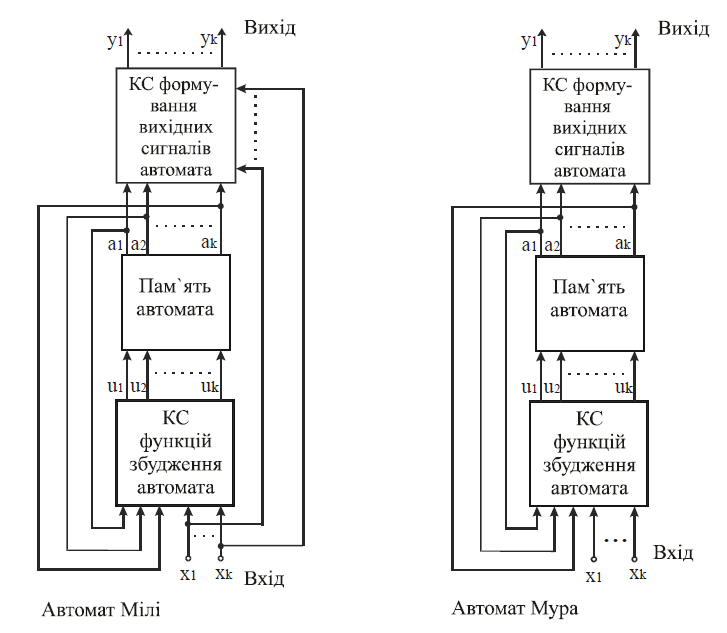 y(t)
= λ[s(t)];
y(t)
= λ[s(t)];
s(t +1) = ϕ[s(t),x(t)].
Рис 1 - Структура автоматів Мілі та Мура
Порядок виконання роботи
Кодування
Кодування це – процес заміни букв алфавітів X,Y,S цифрового автомата двійковими векторами
Цей процес описується таблично (табл. 3, табл. 4, табл.5) у лівій частині таблиці перераховуються всі букви (наприклад вхідного алфавіту), а в правій – двійкові вектори, які ставляться у відповідність цим буквам.
Таблиця 3 - кодування У
|
W1 |
W2 |
W3 |
y1 |
0 |
0 |
0 |
y2 |
0 |
0 |
1 |
y3 |
0 |
1 |
1 |
y4 |
0 |
1 |
0 |
y5 |
1 |
1 |
0 |
y6 |
1 |
1 |
1 |
Таблиця 4 - кодування Х
|
Z1 |
Z2 |
x1 |
0 |
0 |
x2 |
0 |
1 |
x3 |
1 |
1 |
x4 |
1 |
0 |
Таблиця 5 – кодування S
|
Q1 |
Q2 |
Q3 |
s1 |
0 |
0 |
0 |
s2 |
0 |
0 |
1 |
s3 |
0 |
1 |
1 |
s4 |
0 |
1 |
0 |
s5 |
1 |
1 |
0 |
Таблиці переходів та виходів після кодування мають вигляд:
Таблиця 6 – Кодована таблиця переходів
-
Z1
Z2
S1
S2
S3
S4
S5
X1
0
0
110
-
001
000
010
X2
0
1
001
000
110
011
000
X3
1
1
011
011
-
-
110
X4
1
0
110
000
010
001
-
Таблиця 7 - Кодована таблиця виходів
|
Z1 |
Z2 |
S1 |
S2 |
S3 |
S4 |
S5 |
X1 |
0 |
0 |
111 |
- |
110 |
111 |
001 |
X2 |
0 |
1 |
000 |
001 |
010 |
000 |
001 |
X3 |
1 |
1 |
011 |
001 |
- |
- |
110 |
X4 |
1 |
0 |
111 |
000 |
001 |
000 |
- |
|
|
|
|
|
|
|
|