

Математическое моделирование управляемых динамических систем
Известно [1], [2], [3] введение в теорию комбинированных динамических систем (КДС). В учебном пособии [1, стр. 95-113] дано математическое обоснование моделирования нелинейных КДС общего вида по методу многих масштабов [4].
Рассматриваются управляемые КДС с ПИД-управлением и нелинейными исполнителнительными органами с ограниченными ресурсами и запаздывающими аргументами применительно к активным системам ориентации и стабилизации космических аппаратов с вязкоупругими элементами и газореактивными двигателями [5-8].
Дано развитие метода синтеза линейных стационарных КДС по типовым логарифмическим частотным характеристикам [9, стр. 231], [10].
1.Уравнения газореактивной системы управления движением спутника с упругим стержнем и закрепленным на его конце телом.
Рассмотрим
плоское движение (Рис. 1) относительно
орбитальной системы координат абсолютно
жесткого спутника с моментом инерции
![]() и массой
и массой
![]() под действием возмущающего момента
под действием возмущающего момента
![]() ,
с жестко закрепленным на расстоянии
,
с жестко закрепленным на расстоянии
![]() от центра массы спутника прямолинейным
однородным упругим стержнем, несущим
жестко закрепленное на противоположном
конце, абсолютно жесткое тело с массой
от центра массы спутника прямолинейным
однородным упругим стержнем, несущим
жестко закрепленное на противоположном
конце, абсолютно жесткое тело с массой
![]() и моментом инерции
и моментом инерции
![]() .
.
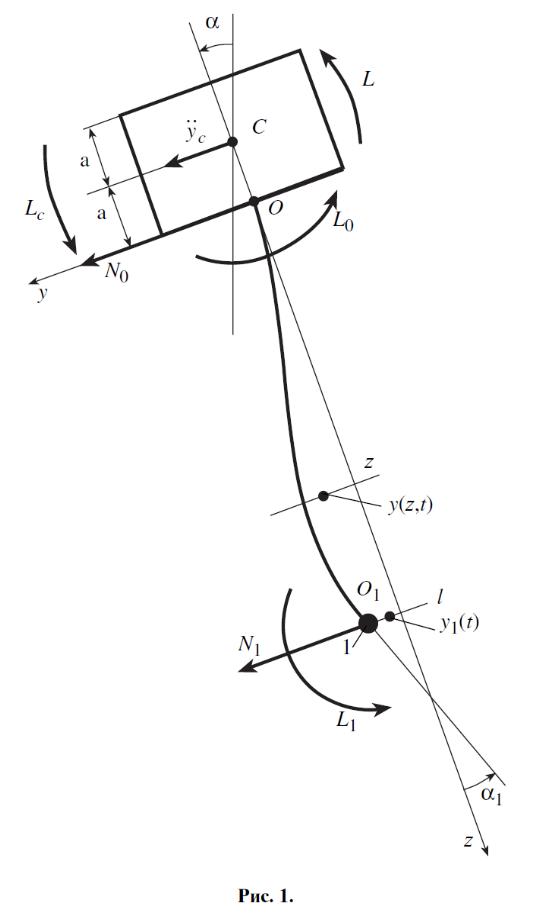
Рис. 1
Полагая
прогибы стержня
![]() значительно меньше его длины
значительно меньше его длины
![]() и, следуя методу Ньютона-Эйлера, запишем
уравнения движения данной системы
и, следуя методу Ньютона-Эйлера, запишем
уравнения движения данной системы
![]()
![]()
![]()
 (1)
(1)


![]()
![]() ,
,
![]()
![]()
![]() ,
,
![]() ,
,
![]()
![]()
![]() ,
,
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() .
.
Здесь:![]() -
возмущающий момент внешних сил;
-
возмущающий момент внешних сил;
![]() -
заданная, входная функция угла поворота
спутника
-
заданная, входная функция угла поворота
спутника
![]() относительно орбитальной системы
координат;
относительно орбитальной системы
координат;
![]() -
управляющий момент сил газореактивных
исполнительных двигателей с нелинейным
типом насыщения и запаздывающим
аргументом
-
управляющий момент сил газореактивных
исполнительных двигателей с нелинейным
типом насыщения и запаздывающим
аргументом
![]() ,
,
![]() -
постоянная времени запаздывания;
-
постоянная времени запаздывания;
![]() -
управление с ПИД - регулятором;
-
управление с ПИД - регулятором;
![]() -
коэффициенты соответственно
дифференциальной, позиционной и
интегральной обратных связей;
-
коэффициенты соответственно
дифференциальной, позиционной и
интегральной обратных связей;
![]() - наибольший момент сил газореактивных
двигателей в режиме насыщения;
- наибольший момент сил газореактивных
двигателей в режиме насыщения;
![]() - коэффициент внутреннего трения в
стержне по Фойгту.
- коэффициент внутреннего трения в
стержне по Фойгту.
Обозначим характерное время в секундах собственного колебания стержня
![]() .
(2)
.
(2)
Где:
![]() – погонная плотность стержня,
– погонная плотность стержня,
![]() (м)
– длина стержня,
(м)
– длина стержня,
![]() -
модуль Юнга,
-
модуль Юнга,
![]()
![]() -
момент инерции поперечного сечения
стержня.
-
момент инерции поперечного сечения
стержня.
Принимая
характерное значение прогибов стержня
![]() значительно меньше его длины
(м),
введем в рассмотрение безразмерные
переменные и параметры
значительно меньше его длины
(м),
введем в рассмотрение безразмерные
переменные и параметры
![]()
![]()
![]()
![]()
![]() (3)
(3)
![]()
![]()
![]()
![]()
![]()
![]() ,
,
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Выражая размерные переменные и параметры в уравнениях (1) через безразмерные переменные и параметры согласно равенствам (3), запишем безразмерные уравнения газореактивной системы управления движением спутника с упругим стержнем и закрепленным на его конце телом.
Например, согласно (3) имеем:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ,
,
![]()
![]()
![]()
![]()
![]()
Подставляя эти соотношения в первые три равенства системы (1), получаем:
![]()
![]()
![]() .
.
Поделив
эти равенства на
![]() и учитывая
и учитывая
![]() ,
записываем
,
записываем
![]()
![]()
![]() .
.
Таким образом, исходная система уравнений движения (1) с учетом условий нормировки (3) преобразуется (проверьте самостоятельно) в систему уравнений движения в безразмерных переменных и параметрах
![]()
![]()
![]() (4)
(4)
![]() ,
,
![]()
![]() ,
,
![]() ,
,
![]() .
(5)
.
(5)
![]()
![]()
![]() (6)
(6)
![]()
![]() ,
(7)
,
(7)
![]()
![]() ,
,
![]() (8)
(8)
образующих
комбинированную динамическую систему
(КДС), где
![]() есть символ производной по времени.
Данная КДС содержит обыкновенные
дифференциальные уравнения (4), динамически
связанные с уравнением с частичными
производными (5) через границы раздела
(6) с условиями связи (7) при нулевых
начальных условиях (8).
есть символ производной по времени.
Данная КДС содержит обыкновенные
дифференциальные уравнения (4), динамически
связанные с уравнением с частичными
производными (5) через границы раздела
(6) с условиями связи (7) при нулевых
начальных условиях (8).
Приведенные выше преобразования размерных уравнений движения (1) в безразмерные уравнения (4) - (8) являются обязательными при использовании методов теории возмущений [4].