

1 |
Теоретические основы автоматизации производства |
1.1 |
Анализ существующих определений понятия «автоматизация производства» |
Прежде чем приступать к изучению любой новой научной дисциплины уместно напомнить известное высказывание выдающегося мыслителя ХVI века Френсиса Бекона: «Определите значения слов…, и вы избавите мир от многих заблуждений».
Основной смысл этого изречения состоит в том, что слово является далеко не самым совершенным носителем информации. Одно и то же слово может иметь абсолютно различный смысл в зависимости от контекста. Проще всего в качестве примера вспомнить слово «лук». В одном случае оно означает название овоща, а в другом – стрелкового оружия. Еще больше проблем возникает, когда слово, обозначающее какое-либо понятие, сформировалось в результате перевода с иностранного языка, например «компьютер». В то же время, изложение теоретических основ любого научного направления возможно только на базе однозначно воспринимаемой системы понятий. В области работ, связанных с совершенствованием производства, в настоящее время накопилось достаточно много терминов, для которых непросто сформулировать словесные определения. В результате в разных литературных источниках они часто имеют различную трактовку в зависимости от основной направленности излагаемого материала. Чтобы почувствовать насколько сложно с помощью слов определять системообразующие понятия, достаточно рассмотреть в качестве примера варианты трактовки в литературных источниках нашего главного термина – «автоматизация производства».
Термин включает два понятия: автоматизация и производство, имеющих как совместное, так и самостоятельное употребление. Каждое из них словами определяется по-разному.
Применительно к понятию «автоматизация» в качестве наиболее общего можно рассмотреть вариант его определения, приведенный в энциклопедическом словаре [32]: «автоматизация – это применение технических средств, экономико-математических методов и систем управления, освобождающих человека, частично или полностью, от непосредственного участия в процессах получения, преобразования, передачи и использования энергии, материалов или информации».
Данное определение достаточно многогранно трактует понятие «автоматизация» как способ совершенствования самых различных направлений человеческой деятельности путем замены человека исскуственными системами – автоматами (automatos – от греч. «самодействующий» – устройство (совокупность устройств), выполняющее по заданной программе без непосредственного участия человека все операции в процессах получения, преобразования, передачи и распределения (использования) энергии, материалов или информации) [32]. В то же время его нельзя считать совершенным хотя бы потому, что понятие «замена человеческой деятельности» требует, в первую очередь, адекватного определения сути самой человеческой деятельности. Кроме того, в приведенном определении нет также и четкой границы между физической и интеллектуальной деятельностью, понимание которой необходимо для рассмотрения особенностей технической реализации средств автоматизации инженерного труда и производственных технологических процессов, а также не раскрывается смысл частичной замены человека автоматом.
Понятие производство в различных источниках также трактуется не однозначно. В частности, в «Философской энциклопедии» [34] оно определяется как процесс, посредством которого люди преобразуют предметы природы для удовлетворения своих потребностей. В учебной литературе по технологии судостроения производство определяется и как «совокупность взаимосвязанных процессов комплексной подготовки производства и постройки судов ...» и как «…система по изготовлению продукции…». Оксфордский словарь научных терминов представляет английский эквивалент понятия «производство» (manufacture) как «make, produce (goods, ets.) a lage scale by machinery», что в переводе на русский язык означает – «изготовление товаров в больших количествах с помощью машин». Двойная трактовка понятия «производство» и недостаточная четкость определения понятия «автоматизация» не позволяют сформулировать однозначное определение термина «автоматизация производства» путем простого логического сложения определений каждой из входящих в термин составляющих, так как в одном случае получается, что «автоматизация производства» – это «выполнение работ по созданию продукции с использованием средств автоматизации – автоматов, а в другом – «…замена людей и механических составляющих производственной системы автоматами
с целью повышения ее эффективности» (направление совершенствования производственной системы).
И одно и другое определение не содержат логических противоречий.
В то же время в большинстве литературных источников процесс эволюции производства представляется в виде иерархического ряда этапов (рис. 1.1.1). Каждый из этапов развития производства базировался на достижениях всех предыдущих, не заменяя их полностью, а только развивая с точки зрения удовлетворения требований, предъявляемых временем. Именно в качестве определения этапа эволюции производства, базирующегося на достижениях ХХ столетия, термин «автоматизация производства» находит сегодня все большее применение.
С учетом изложенного понятие «автоматизация производства» в рамках данной монографии далее будет определяться как: «одно из направлений в совершенствовании производства, суть которого состоит в системной замене людей автоматическими или автоматизированными структурными составляющими. Однако при этом следует отметить, что и в такой трактовке его понимание обусловливает необходимость дополнительного раскрытия входящего в состав определения понятия «системная замена людей…». Именно этому и будет посвящено основное содержание первой части монографии.
Пример с термином «автоматизация производства» наглядно показывает сложность словесного определения понятий, а тем более описания логических связок из них. Более совершенной формой представления любой системы понятий является разработка аналитических определений для ее унитарных структурных составляющих и последующее описание комплексных с помощью аппарата математики. Наличие аналитических определений полностью не может исключить необходимости в употреблении словесных при описании конкретных технических решений, но при этом позволяет привести их к определенной логической системе, в рамках которой они не противоречат друг другу. На сегодня каких-либо общих принципов реализации такого подхода при рассмотрении теоретических основ комплексной автоматизации не существует. Поэтому далее будет использоваться разработанный автором принцип определения основных понятий, связанных с совершенствованием производства, в основу которого положена собственная трактовка понятия работа.
Рис.1.1.1. Этапы
зарождения и развития производства
Комплексно-механизированное производство
Комплексно-автоматизированное
производство
Ручной труд с
использованием инструментов
и механизмов
производственная
система, объединяющая
средства механизации выполнения
техпроцессов с помощью транспортных
связей
производственная
система, в которой автоматизировано
как выполнение технологических
процессов, так и инженерный труд в
области подготовки производства




1.2 |
Определения понятий «работа» и «работопроизводящая система» с позиции основных положений кибернетики |
Бытовое толкование понятия работа человека чаще всего определяет его смысл через затраты энергии, связанные с необходимостью воздействия на окружающий мир. В большинстве случаев работа рассматривается как одна из сторон жизнедеятельности человека, а именно: работа – это труд (энергетический выход выше обычного), а ее отсутствие – отдых. Но это не научные определения.
Известные научные определения понятия работа не однозначны и зависят от области науки, в которой они используются.
Например, в классической физике применяется понятие работа силы, под которым понимается «мера действия силы, зависящая от численной величины и направления силы F и от перемещения S точки ее приложения». Если сила F постоянна по величине и направлению, а перемещение прямолинейно, то аналитическое определение для численного значения работы силы А выглядит в виде формулы:
A = F S cos ,
где – угол между направлениями действия силы и перемещения.
В термодинамике работа определяется как одна из форм обмена энергией (наряду с теплотой) термодинамической системы (физического тела) с окружающими телами. В частности, изменение внутренней энергии замкнутой системы определяется формулой:
DU = Q + A,
где DU – изменение внутренней энергии, Q – количество теплоты, переданное системе, а А – работа внешних сил.
Каждое из приведенных аналитических определений справедливо для своей области применения. Однако в случае использования понятия работа в качестве терминообразующего при рассмотрении теоретических основ комплексной автоматизации производства необходимо определить его смысл с несколько другой стороны. Поскольку, как было показано выше, автоматизация подразумевает замену человека автоматической или автоматизированной системой выполнения работы, для разработки ее теоретических основ необходимо воспользоваться положениями той науки, в которой человек и искусственная работопроизводящая система (автомат) рассматриваются с одинаковых позиций. Такой наукой сегодня является кибернетика [16].
1.2.1 |
Область знаний, формируемая кибернетикой |
В справочной литературе [29], [32], [34] кибернетика (от греч. kybernetike – искусство управления) определяется как – наука об управлении, связи и переработке информации». Однако данное определение не самое совершенное для обоснования того, что с помощью этой науки, можно описать все понятия, связанные с совершенствованием производства, включая автоматизацию.
В большинстве современных литературных источников [14], [22], [33] «отцом кибернетики» называют Норберта Винера. В то же время термин «кибернетика» употреблялся еще Платоном (4 в. до н. э.) и впервые получил статус квалификационного направления в науке в книге Ампера «Опыт философии наук», изданной им в 1834 г. Именно в этой книге в общей классификации наук «кибернетика» стоит на третьем по счету месте, как наука о текущей политике и практическом управлении государством. Однако, если кибернетика Ампера имела социально-политический уклон, то кибернетика Винера ориентирована на электронно-вычислительное направление и в сформулированном им определении трактуется как «наука об управлении и связи в животном и машине». Именно эта составляющая ее определения («…в животном и машине») изначально и принята автором в качестве обоснования применения кибернетики для описания теоретических основ автоматизации производства.
С началом эпохи автоматизации производства определение кибернетики несколько изменилось. В современных изданиях, посвященных вопросам создания средств автоматизации, кибернетику часто определяют как науку о способах восприятия, передачи, хранения, переработки и использования информации [17], [21]. Именно в такой трактовке мы и будем определять кибернетику далее.
Областью научных приложений кибернетики являются так называемые киберсистемы. Однако однозначных определений понятия киберсистема не существует. Поэтому в рамках данной монографии понятие киберсистемы будет использоваться как объединяющий термин для естественных и искусственных систем выполнения работы. Главной идеологической основой данного объединения будет то, что независимо от того естественного ли они происхождения (биологического - как, например, человек) или искусственного (технические автоматы), они представляют собой энергогенерирующие системы, вектор расхода энергии у которых (энергетический выход) определяется результатом воздействия введенной в них информации (это – упрощенное определение автора).
Используя данное определение понятия «киберсистема», процесс превращения информационного воздействия в энергетический выход можно трактовать как содержание ее «работы», а саму киберсистему определять как «работопроизводящую систему».
В качестве иллюстрации наличия логики в данном подходе к определению работопроизводящей системы достаточно рассмотреть собственно человека.
Человек на протяжении всей своей жизни является энергогенерирующей системой (пока человек жив, он потребляет продукты питания, а его пищеварительная система вырабатывает биоэнергию). Любая энергогенерирующая система, существующая во времени, по законам сохранения энергетического баланса должна ее расходовать. Применительно к человеку основной расход энергии (энергетический выход) осуществляется через его костно-мышечную (работопроизводящую) систему. Что же касается направления расхода энергии (всего того, что человек делает), то, помимо главной задачи –обеспечения непрерывности процесса генерации энергии (именно необходимость поддержания процесса генерации энергии в живом организме – добычи «хлеба насущного» составляет изначальную основу потребности в выполнении работы), оно определяется результатом всех его контактов с окружающим миром. То есть, фактически, представляет собой ответную реакцию на воспринимаемую им информацию.
Любое действие человека – результат ответной реакции на введенную в него (не только в данный конкретный момент времени, а на протяжении всего периода жизнедеятельности) информацию, и, следовательно, человек, как кибербиосистема, осуществляет постоянный процесс восприятия информации, хранения (запоминания), обработки и превращения ее в энергетический выход.
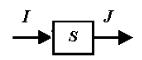
Данное словесное определение киберсистемы можно представить в виде следующей пиктограммы*:
*Пиктограмма – это графическое изображение какой-либо команды, или конкретного действия, позволяющее легко запомнить их смысл. Методика использования пиктограмм впервые была предложена в Советском союзе А. Р. Лурией [24] и сегодня широко применяется в рамках изучения основ запоминания. В технике наиболее показательным вариантом использования пиктограмм является меню текстового редактора Word или компьютерных справочных систем. В современном легковом автомобиле все указания о неисправностях также выводятся на дисплей с помощью пиктограмм.
Приведенная пиктограмма определения понятия «киберсистема» иллюстрирует суть работы киберсистемы в форме «черного ящика»* с точки зрения основных положений кибернетики, а именно:
в киберсистему (S) входит информация (I), которая превращается в ней в энергетический выход (работу) – J ).
* «Черный ящик» – это основополагающее понятие в кибернетике [20]. С его помощью описываются все большие системы, не поддающиеся детальному описанию, но о которых известно хотя бы то, что в результате какого-либо известного воздействия на нее («вход») будет получен вполне определенный результат («выход»). Методом «черного ящика» системы изучаются только с одной позиции – поведение любой системы представляется на основе анализа соотношений между входами и выходами. При этом ни строение систем, ни материал, из которого они созданы, во внимание не принимаются.
С помощью данной пиктограммы далее будет обозначаться как работа человека, так и любой автоматической системы (автомата), поскольку в кибернетическом смысле они являются идентичными системами по превращению информации в работу. Однако перед тем как это понять необходимо разобраться с тем, «а что же такое информация?»
1.2.2. |
Определение понятия «информация» |
Слово «информация» в переводе с латинского (informatio) означает «сообщение, осведомление о чем-либо» [34]. Однако современная практика применения данного слова в качестве терминообразующего понятия показала, что такое переводческое толкование не может служить определением его истинного содержания.
Например, в математике информация относится к области абстрактных категорий, подобным математическим формулам.
В 1928 году Хартли предложил логарифм при основании два для вычисления количества информации через энтропию – меру неопределенности [39].
Понятие «энтропия» (от греч. эн-тропе – обращение) используется в различных областях знаний. В термодинамике оно означает вероятность теплового состояния вещества, в математике – степень неопределенности ситуации или задачи, а в информатике характеризует способность источника отдавать информацию.
В 60-х годах академиком Андреем Николаевичем Колмогоровым была создана область математики, получившая название «алгоритмическая теория информации» [20]. В рамках комбинаторного подхода созданной теории количество отдаваемой информации определяется следующим образом.
Если переменное х способно принимать значения, принадлежащие конечному множеству Х, состоящему из N элементов, то «энтропия» Н переменного х будет определяться как:
Н(х) = log2N.
Указывая определенное значение х = а переменного х, энтропия «снимается» и происходит передача «инфрмации» объемом:
I=log2N(формула Хартли).
Если переменные х1, х2 …, хk способны независимо пробегать множества, которые состоят соответственно из N1, N2, …, Nk элементов, то энтропия будет равна:
Н(х1 ,х2 , …, хk) = Н(х1) + Н(х2) + … + Н(хk),
а для передачи количества информации I понадобиться использовать
![]()
I= [I] + 1 при I дробном
двоичных знаков. В частности, число различных «слов», состоящих из k нулей и единиц и одной двойки, будет равно 2k( k + 1). Поэтому количество информации в такого рода сообщениях будет равно:
I = k + log2 (k + 1),
а для «кодирования» подобных слов в двоичной системе потребуется
I′ ≈ k + log2k нулей и единиц.
Именно поэтому на практике единица информации получила название «бит» как аббревиатура от английского словосочетания «Binary digiT – двоичная цифра». Бит – это количество информации, соответствующее утверждению, что произошло одно из двух равновероятных событий.
В кибернетике понятие «информация» также не имеет однозначного определения, даже несмотря на то, что один из ее наиболее существенных разделов называется «теория информации» [20].
Известный кибернетик Х. Дж. Флехтнер писал: «…информация – не только центральное понятие в теории информации, но также и одно из фундаментальных понятий кибернетики в целом. В то же время это самое трудное понятие для всякого, кто хочет вникнуть в проблемы кибернетики. Даже беглый обзор литературы свидетельствует о том, что его определения, даваемые в теории информации, вкладывают в него смысл, совершенно отличный от того, который мы привыкли с ним связывать».
Попытки дать полное определение понятия «информация» продолжаются постоянно. Чаще всего исследователи отмечают неформализуемость человеческого участия в информационных процессах и поэтому стараются исключить человека из рассмотрения при толковании данного понятия. Информационные процессы рассматриваются как нечто происходящее между источником и приемником посредством канала передачи. Норберт Винер в рамках изложения основ кибернетики определил информацию как меру организации, но не материи и не энергии, а Клод Шеннон в своей теории связи [38] исключил необходимость рассматривать смысл информации, а думать только о надежности ее передачи. В. М. Глушков [16] подверг сомнению необходимость наличия получателя и отнес информацию к объективной реальности, существующей помимо человека. А. Н. Колмогоров [21] решил, что информация может быть оценена сложностью алгоритма, ее порождающего, и оставил за кадром оценку сложности человеческого интеллекта.
Тем не менее, рассматривая человека как работопроизводящую систему, фундаментальным является прежде всего процесс восприятия им окружающей среды, составляющих ее материи и энергетических полей. «Информация» (во всяком случае, та ее составляющая, которая необходима для рассмотрения вопросов, связанных с совершенствованием производства) всегда проявляется только в материально энергетической форме, в виде сигналов (т. е. является элементом энергетического воздействия). Не вдаваясь в доказательства, можно добавить к ее определению и тот факт, что применительно к рассматриваемой области трактовки данного понятия она воспринимается только энергогенерирующими системами.
Все, что мы слышим, видим и чувствуем – есть результат энергетического воздействия внешней среды на наши органы чувств – анализаторы (рецепторы, каналы нервной системы для передачи полученных сигналов в головной мозг, собственно мозг и накопленные в нем знания для обработки полученных сигналов, каналы обратной связи и т.п.), который впоследствии превращается в состояние энергетики головного мозга – энергетические маски, а затем в работу – энергетический выход [24]. Но только до тех пор, пока человек жив. Мертвый человек не в состоянии воспринимать информацию в виде энергетического воздействия, также как не способен и осуществлять энергетический выход, поскольку он уже не генерирует энергию. Ну, а что там на том свете, нам знать не нужно для рассмотрения проблем автоматизации.
В начале учёные долго утверждали, что у человека есть пять чувств для ввода информации: слух, зрение, обоняние, вкус, осязание. Однако в 1950 году вышла в свет книга Л. Рона Хаббарда «Дианетика: современная наука о разуме», в которой он утверждал, что информация может вводится в мозг путем гораздо большего количества восприятий: температуры, запаха, звука, настроения, пульсации сердца, тонуса мышц, движения, а также несколько десятков других. Эта гипотеза не перестает развиваться. Поэтому говорить о ее истинности бессмысленно. Очевидным стал факт, что во всех случаях результатом восприятия является энергетическое воздействие на информационно-воспринимающую систему головного мозга. Некоторые примеры данного энергетического воздействия при передаче информации приведены в таблице 1.2.1. В то же время, просто энергетическое воздействие – это еще не информация. В частности, одна и та же информация может передаваться путем различного энергетического воздействия. Так, если человек знает китайский, корейский и арабский языки, то написание и произнесение любой фразы на каждом языке будет требовать от него разных усилий (запись текста будет разной длины и содержать разное количество знаков). Разным будет и энергетическое воздействие на информационно-воспринимающую систему человека, знающего все эти языки. Однако объем полученной информации всегда будет одинаков.
Таблица 1.2.1 |
Варианты энергетического представления информации, воспринимаемой человеком |
|
|||
|
18 19 20Стимулы |
Диапазон обнаружения |
|||
Анализаторы |
Нижний абсолютный порог |
Верхний порог |
|||
Зрительный |
Интенсивность белого света Цвет Прерывистый белый цвет |
(2,2-5,7) * 10-10
300 мик 1 прерыв/сек |
( ) ~ * 10-9 (пороговая интенсивность) ~ 1050 мик ~ 50 прерыв/сек |
||
Слуховой |
Интенсивность звука
Частота чистого тона Прерывистый белый шум |
10-9 эрг/см2
16-20 гц 1 прерыв/сек |
~ 1014 (пороговая интенсивность) 20-22 гц 2000 прерыв/сек |
||
Кожно-меха-нический и вибрационный |
Механическая вибрация (по амплитуде) Давление Частота механических колебаний |
0,00025 мм 0,026 эрг
1 гц |
~ 40 дб выше пороговой ~ 106 (пороговая интенсивность) 10 ктц |
||
Температурный
|
Температура |
0,00015 г.малых кал/см2/сек |
0,218 г. малых кал/см2/сек |
||
Вестибулярный |
Линейное ускорение
Угловое ускорение Положение и движение |
0,08 град
0,12 град/сек2 0,2-0,7 град |
Положительная сила инерции 5-8 g Отрицательная сила инерции 3-4,5 g. То же Неизвестно |
||
Обонятельный |
Запах |
2*10-7 лит/м3 |
Неизвестно |
||
Вкусовой |
Вкус |
4*10-7 гранмолекул концентрированного раствора |
Неизвестно |
||
В случае, когда человек слышит какую-либо фразу на неизвестном ему языке, энергетическое воздействие на его слуховые анализаторы может быть близким к родному, но объем полученной информации окажется в результате эквивалентным сказанному: «Человек говорит на неизвестном языке».
В литературе приводятся свидетельства, что в качестве религиозного заклинания священнослужителями в свое время использовалось изречение московского юродивого Корейши – «не праци бенды кололаци». Никто никогда не знал истинного значения данных слов, потому что очевидно, его просто не существовало. Магический эффект производило какое-то странное сочетание звуков, собственно и являющееся информационной основой заклинания, которое каждый воспринимал по-своему, в зависимости от состояния его внутреннего мира – души.
Последние рассуждения укрепляют предположение, что информация (ее материально-энергетическая суть) есть некоторая энергетическая субстанция (поле), с которым работопроизводящие системы могут взаимодействовать, но только в результате их определенной настройки. Информационное поле настраивает работопроизводящую систему на выполнение работы по восприятию информации (например, вкладывает знание различных языков, наук по переработке информации и т.п.) для осуществления воздействия на материальное поле.
Подобное толкование понятия информация, разрабатывается сегодня в одной из недавно зародившихся научных дисциплин – ИНФОРМАЦИОЛОГИИ (информация + логия = учение, наука об информации) [40]. В рамках данной дисциплины информация рассматривается как всеобщий, бесконечный, единый законопроцесс фундаментальных отношений, связей, взаимодействий и взаимозависимостей энергии (Э), движения (Д), массы (М) и антимассы (АМ), микро и макроструктур Вселенной. Мир информационен. Первичное – информация; вторичное – материя. Информация – это единое материализованное и дематериализованное пространство вселенной. Информационное поле воздействует на материальное через «информационно–обрабатывающие системы», для которых информация всегда проявляется только в материально-энергетической форме в виде сигналов (т.е. является элементом энергетического воздействия).
По уровню сложности определение понятий информация и память стоят на одном уровне с гипотезой Пуанкаре, которую называют «Формулой вселенной». Лишь недавно отечественному ученому математику Пеллерману присудили Нобелевскую премию за ее доказательство. Однако ждать точного определения понятий информация и память для разбора теоретических решений, связанных с автоматизацией производства, мы не будем. В объеме данной монографии далее будет достаточно пользоваться следующим определением автора: информация есть результат энергетического воздействия на информационно-воспринимающую составляющую работопроизводящей системы, способный порождать ее ответную реакцию (энергетический выход).
Данное определение будет общим для работопроизводящих систем естественного (человек) и искусственного (автомат) происхождения.
1.2.3 |
Отличие между работопроизводящими системами естественного и искусственного происхождения |
В кибернетике с самого начала ее развития делались попытки определить смысл понятия «живая система».
Крупнейший ученый в области кибернетики и автоматизации
А. А.Ляпунов приводил в своих ранних работах следующие словесные определения понятий живое вещество и собственно жизнь [25]:
«Вещество ограниченно однородное, относительно и повышенно устойчивое, обладающее сохраняющими реакциями и управляющей системой, которая их вырабатывает и которая использует информацию, хранимую в виде молекулярных кодов, называется живым. Иначе говоря, жизнь – это высокоустойчивое состояние вещества, использующее для выработки сохраняющих реакций информацию, кодируемую на молекулярном уровне состоянием отдельных молекул».
В приведенном определении главным является то, что живое вырабатывает сохраняющие реакции (выполняет работу) на основе информации, кодируемой на молекулярном уровне. Однако современный уровень развития кибернетики свидетельствует о том, что подобное возможно и в других системах, включая искусственные.
В одной из своих работ [ 21] А. Н. Колмогоров писал:
«Определение жизни как «особой формы существования белковых тел» (Энгельс) было прогрессивно и правильно, пока мы имели дело только с конкретными формами жизни, развившимися на Земле. В век космонавтики возникает реальная возможность встречи с «формами движения материи», обладающими основными практически важными для нас свойствами живых и даже мыслящих существ, устроенных иначе. Поэтому приобретает вполне реальное значение задача более общего определения понятия жизни».
Сегодня ясно, что предела совершенствованию искусственных работопроизводящих систем, в принципе, не существует. Все, что может делать человек, смогут (и даже лучше) в будущем делать и искусственные работопроизводящие системы (автоматы – например, интеллектуальные роботы, такие как «терминатор» из известного кинофильма). При этом они будут создаваться как на основе неживого исходного материала (металл, полимеры и т.п.), так и «живого – биологического, клеточного». Однако полностью идентичными человеку данные системы быть не могут, поскольку человека и все живое сделал «БОГ – МИРОВОЙ КОСМОС», и поэтому человек в своем творчестве созидания искусственных работопроизводящих систем не сможет стать сильнее «ГЛАВНОГО ТВОРЦА».
Преподобный Макарий Великий очень часто в своих беседах с христианами обращался к объяснению назначения, данного человеку Творцом. Он выражался о человеке, как об обители, храме, сосуде, Престоле Божества. «Благоизволил Небесный Отец обитать во всяком, верующем в Него и просящем у Него... Внутренний человек есть некое живое существо, имеющее свой образ и вид: внутренний человек есть подобие внешнего человека. Это – превосходнейший и драгоценнейший сосуд, потому что Бог благоволил о нем более, нежели о всех тварях. Престол Божества есть ум наш, и, наоборот, престол ума есть Божество и Дух».
Данное суждение показывает на невозможность искусственного воспроизведения того, что сделано Творцом. При этом об интеллектуальном уровне Преподобного Макария говорит тот факт, что Академией наук Российской империи в его честь была утверждена одна из самых престижных в свое время научных премий – «Макарьевская».
В то же время А. Н. Колмогоров в своих рассуждениях на тему «что такое жизнь?» писал [21]:
«Когда говорят, что организация механизма наследственности, позволяющего живым организмам передавать свое целесообразное устройство потомкам, имеет целью воссоздать данный вид, придать ему определенные свойства, а также возможности изменчивости, прогрессивной эволюции, то кто же ставит эту цель? Или если рассматривать систему в целом, то кто же, как не она сама, ставит перед собой цель развития путем отсеивания негодных экземпляров и размножения совершенных?»
Если не вдаваться в философию данной проблемы, а рассматривать ее с чисто технической точки зрения, то наиболее просто разницу между работопроизводящими системами естественного и искусственного происхождения можно определить способностью живых к самовоспроизведению для обеспечения бесконечности процесса реализации заданной «природой – Богом» функции переработки информационного поля. Ничто живое не в состоянии изменить свое место и роль в существующей цепочке вариантов биосистем, взаимодействующих с информационным полем.
Сегодня много фильмов и книг иллюстрируют, насколько сложен и взаимоувязан биологический мир. У каждого живого существа есть своя функция, которую оно выполняет в процессе существования. Эта функция дана ему природой. И если какое-либо из живых существ исчезает (перестает самовоспроизводиться), результатом может быть не только нарушение биологического баланса, но и экологические катастрофы. Поняв это, люди стали стремиться к сохранению всего множества видов живых существ, созданных природой, введя, например, понятие «Красной книги», даже не зная до конца роли каждого сохраняемого вида в общем процессе реализации взаимодействия информационного поля и материального.
Искусственные работопроизводящие системы, в принципе, смогут самовоспроизводиться (для этого нет формальных ограничений), однако их роль в области переработки информационного поля всегда будет определяться («программироваться») человеком. Как только это станет невозможным, разница между живым и неживым исчезнет, но этого не должно случиться.
В варианте, если это произойдет, человек сам создаст себе конкурирующую систему «жизни» (существования) на Земле и фантастические войны людей и роботов могут стать реальностью.
Прежде чем перейти с позиции кибернетики к рассмотрению вариантов развития работопроизводящих систем необходимо рассмотреть структуру унитарной (самой простой – базовой) работопроизводящей системы и принцип процесса превращения в ней информации в энергетический выход – работу, хотя бы схематично.
1.2.4 Структурная модель «унитарной работопроизводящей системы»
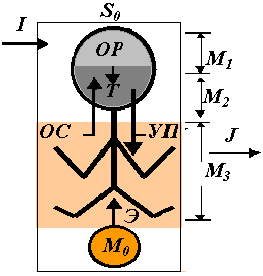
Структурную модель «унитарной работопроизводящей системы» удобнее всего рассмотреть на примере системы S0 – квазичеловека, так как это позволяет пользоваться понятными аналогиями с элементами «конструкции человеческого тела».
Если принять, что реализацию всех этапов превращения информационного воздействия в энергетический выход осуществляют определенные структурные составляющие системы S0 , то структурную модель киберсистемы S0 (конечно, весьма упрощенно) можно представить в виде суммы четырех основных составляющих – подсистем (рис.1.2.1):
S0 = M1 + M2 + M3 + M0, или S0 : (M1 , M2 , M3 , M0 ),
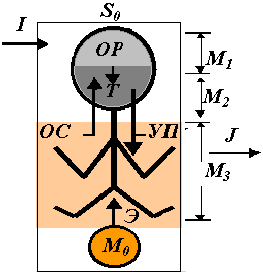
Рис.
1.2.1. Структура «унитарной работопроизводящей
системы – (S0)»
где:
М1 – подсистема восприятия информации (глаза, уши, органы осязания и т. п.; каналы передачи энергетического воздействия в головной мозг); формирования знаний; генерации «образа работы» и технологии его воспроизведения с помощью имеющейся М3 (память и средства формирования информационных образов – «статический ум»);
М2 – подсистема передачи команд управления процессом реализации «образа работы» к имеющейся М3 в реальном режиме времени (головной мозг, знания, нервная система, органы чувств и т. п. – «динамический ум»);
М3 – подсистема превращения биоэнергии, сгенерированной в М0 , в механическую работу под управлением М2 (костно-мышечная система – «механизм»);
М0 – генератор биоэнергии (пищеварительная система, кровь и т. д. – «мотор»).
При этом:
-
I –
вводимая информация (задание на работу);
ОР –
сгенерированный в М1 образ работы ;
Т –
технология выполнения работы (структурная управляющая программа) сгенерированная в М1 и переданная в М2;
УП –
сгенерированная в М2 система биоэлектрических импульсов для мышц М3 (динамическая управляющая программа);
ОС –
сигналы обратной связи, поступающие в М2 из М3;
Э –
биоэнергия, генерируемая в M0;
J –
энергетический выход из системы S0 – работа;
На первый взгляд данная модель кажется слишком упрощенной и даже несколько надуманной.
Разработка научно-обоснованной структуры и принципов функционирования живых систем является одним из фундаментальных направлений современной кибернетики. Для того, чтобы представить уровень, на котором изучается эта область знаний, достаточно рассмотреть один из вариантов моделирования мышечного веретена и собственно мышцы человека (конструктивной составляющей М3 ).
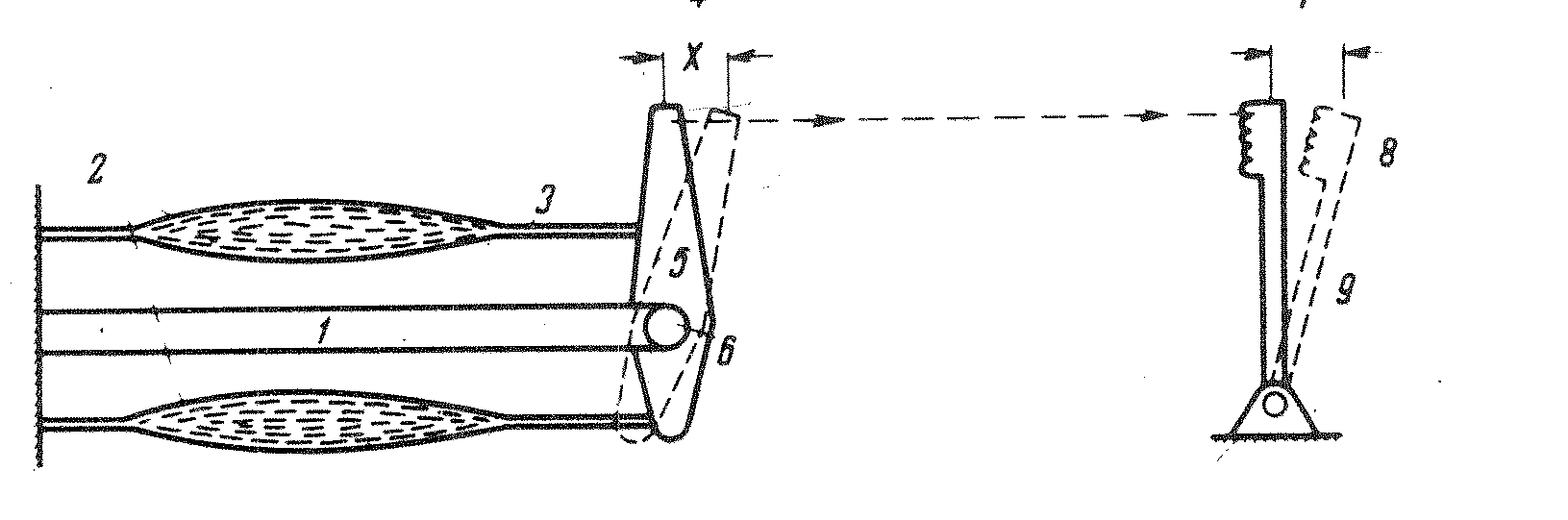
В рамках физиологического рассмотрения [27] этот орган представляется в виде сложной нервно-мышечной интегративной системы, получающей командные сигналы от центральной нервной системы и со своей стороны посылающей в нее по нескольким проводящим путям непрерывный поток афферентных сигналов (рис.1.2.2, а). Помимо мышечного веретена в выполнении двигательных реакций участвуют и определенные сенсорные органы.
В центральной части веретена имеется утолщение, называемое областью ядерной сумки, являющееся главной чувствительной частью этого органа. Эта сумка подвешена к двум интрафузуальным мышечным волокнам. К ним подходят нервные проводники – «гамма-аксоны». Сигналы, поступающие по этим проводникам, вызывают изменения длины и напряжения окружающей мышцы. В типичной мышце имеется около 50–80 веретен, расположенных внутри основной массы среди создающих напряжение мышечных волокон.
Нервно-мышечная система является типичной адаптивной исполнительной системой, поэтому для создания аналогичных технических систем в кибернетике используется ее модель (рис. 1.2.2, б,в).
Теоретической основой построения модели мышцы стали результаты экспериментальных исследований на человеке зависимости «сила-скорость», которые позволили описать их следующим соотношением:
F
=
![]() ,
,
где F – усилие мышцы, передаваемое на нагрузку;
P – изометрическое напряжение;
V – скорость укорочения мышцы;
Vm – максимальная скорость укорочения;
![]() –
константа..
–
константа..
Мышечные волокна
Аксон
- мотонейрона
Ядерная сумка
Интрафузальное
мышечное волокно
Аксон
Первичное волокно
б
23
Рис. 1.2.2. Моделирование работы мышцы в
кибернетике а
– упрощенная схема мышечного волокна;
б – кибернетическая модель мышечного
веретена; в – кибернетическая модель
системы «конечность – манипулятор»
в
а


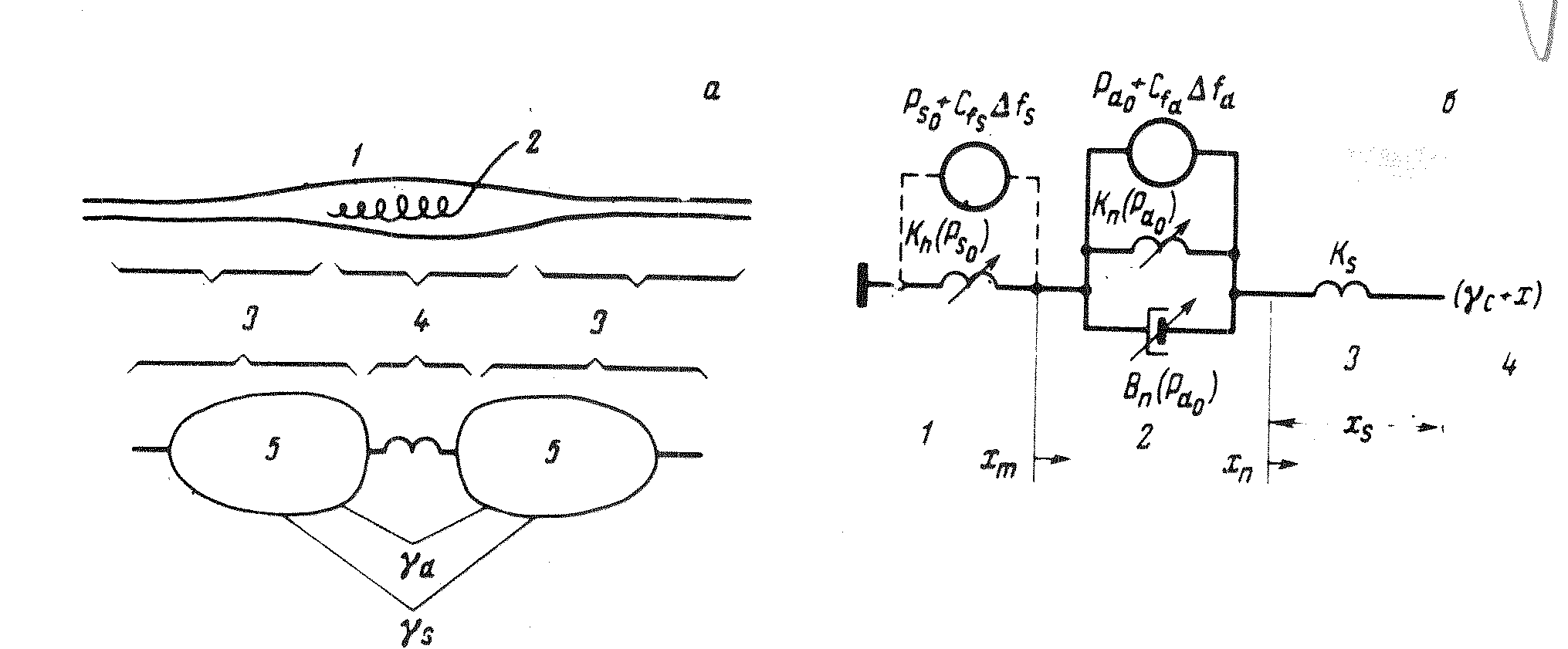
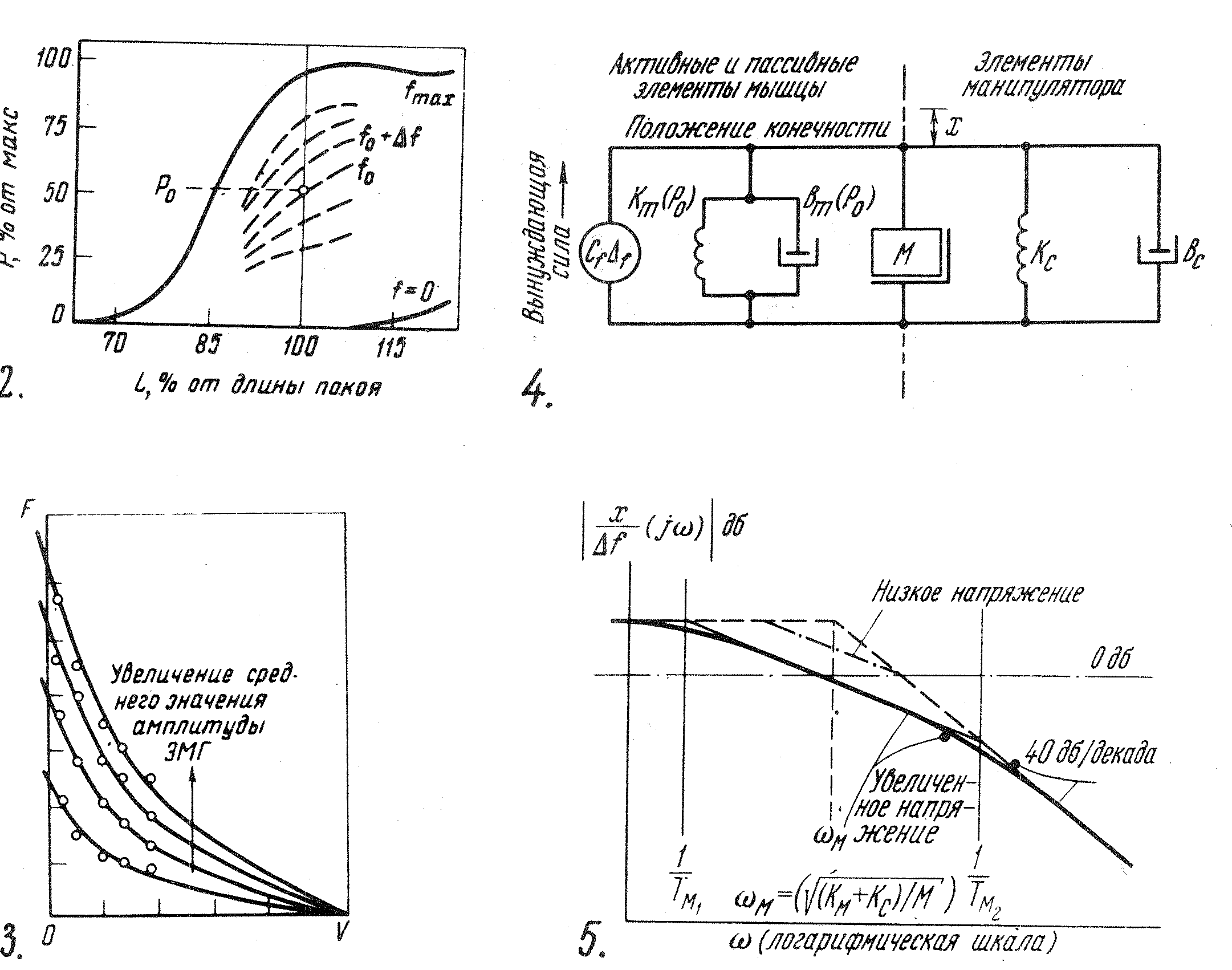


Это соотношение полностью аналогично применяемой в теории автоматизации характеристике «сила–скорость» для силового привода.
Приведенный пример моделирования функционирования мышцы показывает уровень сложности создания кибернетической модели человека. В то же время рассмотренная выше упрощенная модель системы S0 позволяет построить общую для дальнейшего изучения аналитическую систему понятий и вывести определения всех необходимых для изучения структурных составляющих производственной системы и основных этапов ее развития путем рассмотрения возможных вариантов совершенствования процесса превращения информационного воздействия в энергетический выход в системе S0 .
1.2.5 |
Схема процесса превращения информации в энергетический выход в «унитарной работопроизводящей системе» |
Никто еще не разработал научно-обоснованную схему процесса превращения информационного воздействия в энергетический выход в работопроизводящей системе. В приведенном варианте она строилась автором методом «от обратного» на основании того, что сегодня стало очевидным, и при этом также использовалась методология «черного ящика».
Мозговую деятельность вряд ли когда-то можно будет представить как систему с заданным количеством переменных. Поэтому, чем ближе наука, связанная с ее изучением, к реальной жизни, тем больше она вынуждена утрачивать строгость и точность. Сегодняшние представления о способах восприятия и запоминания информации человеком не противоречат, принятому ранее определению энергетического воздействия на информационно-воспринимающую составляющую человека.
В частности, известно, что мозг человека состоит из миллиардов (~1010) нервных клеток – нейронов, которые способны получать сигналы от других нейронов и передавать сообщения далее. Информация в мозгу переносится в виде импульсов нервной активности, имеющих электрохимическую природу. Нейрон – по современным представлениям элементарное биологическое устройство, способное к простейшей переработке информации. Основными структурными составляющими нейрона являются (рис. 1.2.3):
ядро, которое управляет всеми действиями нейрона;
дендриты – короткие отростки ядра, получающие сообщения от других нейронов;
а
а)
Рис.
1.2.3 Структура и принцип работы нейрона
(а), условная схема нейрона (б)
∑
Дендрит
Дендрит
Аксон
б)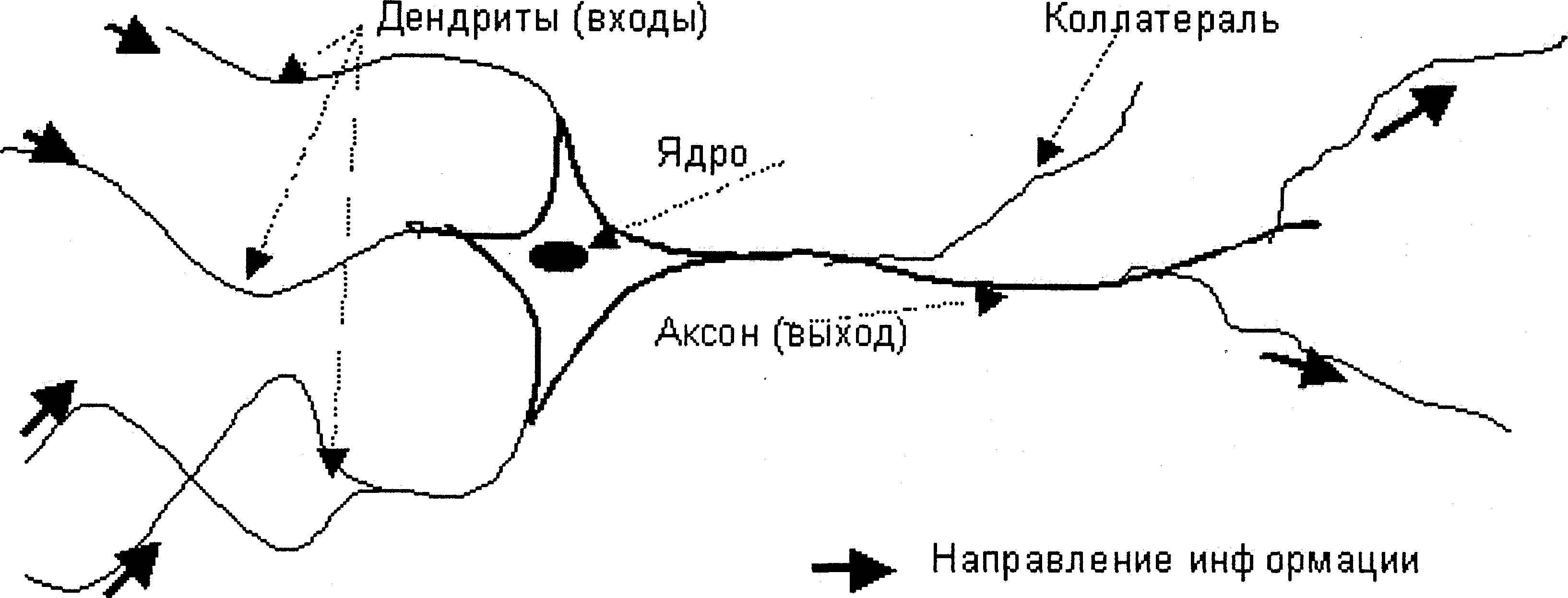


При электрическом возбуждении (одного или более) дендритов, принадлежащих одной клетке, ее внутреннее состояние в некоторый момент может измениться. Электрический потенциал нейрона по отношению к межклеточному пространству может увеличиться примерно на +30 милливольт (мв). Такое состояние клетки называется «возбужденным». При этом вдоль аксона в течение около 30 миллисекунд (мс) распространяется электрический импульс, доходя до самых удаленных его частей (в том числе и концов коллатералей). Обычно с аксоном и коллатералями соприкасаются дендриты других нейронов, и при этом электрический импульс, проходящий по аксону, вызывает возбуждение следующих дендритов, а затем и нейронов, которым они принадлежат. Аксон и коллатерали передают сигналы на дендриты следующих за ними клеток через особые соединения, называемые синаптическими контактами или просто "синапсами".
Управление передачей сигнала осуществляется за счет разделения нейронов на «возбуждающие» и «тормозные». Принцип работы возбуждающих нейронов был описан выше. Разница между возбуждающими нейронами и тормозными состоит в том, что тормозные не только не вызывают возбуждения связанных с ними клеток, но наоборот, приводят последующие клетки к полной невосприимчивости по отношению к другим возбуждающим импульсам, приходящим к этим клеткам через их дендриты. Обычно аксон тормозного нейрона образует контакт с последующей клеткой не через ее дендриты (хотя бывает и так), а через контакт аксона тормозного нейрона, находящийся прямо на теле следующей клетки.
В

П
Рис.1.2.4 Нейронное
кольцо
(стрелками указано
направление циркуляции информации)
Описанная теория запоминания информации представлена очень примитивно. Однако в дальнейшем она поможет строить определенные аналогии при рассмотрении принципов обработки информации в ЭВМ. Для дальнейших же рассуждений нам будет необходима только общая схема превращения информационного воздействия в энергетический выход.
Приведенная в данной монографии схема не является научно обоснованной, а построена лишь на логическом предположении автора о том, как это происходит у человека. Однако она позволила разработать аналитические описания необходимых для рассмотрения вариантов существующих работопроизводящих систем.
В качестве основы для разработки схемы превращения информационного воздействия в энергетический выход была принята искусственная система S0 – (квазичеловек, условно не имеющий жизненного опыта и не нуждающийся в добыче пищи – его кормят).
Для системы S0 логичной будет следующая последовательность этапов превращения информации в работу (рис.1.2.5).
В начале работает подсистема М1 .
На первом этапе она воспринимает окружающий мир с помощью своих органов чувств (в нее вводится информация через уши, глаза, нос, и др.) и формирует в памяти ощущения (суть – энергетические маски в мозгу; информационное поле настраивает систему на восприятие информации); этот этап можно назвать приобретение опыта;
на втором этапе, анализируя свой опыт (информацию в памяти), она (S0) находит в нем закономерности (структурирует с помощью собственной логической системы энергетические маски в долговременной памяти в зафиксированных единицах информации – приобретает умение воспринимать информацию), превращая опыт в знания (система получает необходимую настройку для восприятия и переработки информационного поля);
затем новые ощущения (суть – введенная информация) порождают у S0 необходимость расхода энергии, в результате чего она с помощью накопленных опыта и знаний генерирует образ работы (вектор расхода энергии – вид воздействия на окружающий мир или образ создаваемого объекта) применительно к имеющимся у нее возможностям костно-мышечной системы (подсистемы М3 );
на основе спроектированного в мозгу образа работы (скажем «проекта» создаваемого объекта) она определяет последовательность действий по использованию своей работопроизводящей подсистемы М3 – технологию
выполнения работ для реализации образа работы, которую пересылает в подсистему М2;
подсистема М2 генерирует с помощью имеющихся у нее профессиональных знаний (накопленный опыт и знания о приемах выполнения единичных видов работ) систему биоэлектрических импульсов (управляющую программу – УП) к работопроизводящей подсистеме М3 и реализует их передачу к мышцам в реальном режиме времени* для выполнения работы с обеспечением обратной связи (ОС)**.
5


 *Реальный режим
времени – это термин, использующийся
при описании автоматизированных систем
управления. Суть его упрощенно сводится
к тому, что при отработке команд управления
интервал между каждым управляющим
сигналом равен времени его отработки,
т.е. скорость выдачи управляющих команд
соответствует (находится в функциональной
зависимости) от скорости выполнения
работы.
*Реальный режим
времени – это термин, использующийся
при описании автоматизированных систем
управления. Суть его упрощенно сводится
к тому, что при отработке команд управления
интервал между каждым управляющим
сигналом равен времени его отработки,
т.е. скорость выдачи управляющих команд
соответствует (находится в функциональной
зависимости) от скорости выполнения
работы.
** Смысл обратной связи состоит в том, что в процессе выполнения работы результат реализации каждого элементарного действия, осуществляемого под управлением приходящих управляющих сигналов, анализируется с помощью специальных анализаторов (у человека это – зрение, слух, органы чувств и т. п.) и в случаях, когда он не соответствует ожидаемому (сгенерированному в образе работы), порождаются корректирующие воздействия, которые приводят реальные результаты исполнения команд к запланированным. При этом количество итераций может быть любым.
Рассматривая описанные этапы с точки зрения «технической основы» их выполнения, очевидно, что все они реализуются в головном мозге и с помощью имеющихся в нем знаний по восприятию и обработке информации. Объем накопленных знаний определяет как уровень сложности проектируемого образа работы, так и возможность его качественной материализации с помощью имеющейся работопроизводящей составляющей (маленький мальчик не сможет сделать того, что сделает профессиональный рабочий – у последнего больше накопленного опыта, профессиональных знаний (лучше структурирована управляющая программа, меньше количество итераций на уровне обратной связи и быстрее реакции мышц).
В общем случае процесс накопления знаний связан со временем, поэтому теоретически большими возможностями в процессе превращения информации в работу обладают более старшие люди. Если рассматривать нашего искусственного квазичеловека как индивидуальную биологическую киберсиcтему (все этапы обработки информации реализуются в одной голове), то уровень возможной работы будет зависеть от накопленных способностей воспринимать информацию, логически ее обрабатывать и превращать в знания; проектировать образ работы и способ ее выполнения в зависимости от полученных навыков управлять костно-мышечной системой, а также умения быстро генерировать управляющие сигналы для мышц, включая отработку сигналов обратной связи. Однако при этом весьма важно понять, что любая работа всегда является результатом только последовательного выполнения всех описанных выше этапов обработки информации, хотя в большинстве случаев они реализуются в разные периоды времени. Ощущения могут послужить началом любого из этапов превращения информации в работу, но его реализация всегда будет осуществляться только на основе результатов всех ранее выполненных.
Человек никогда, наверное, не придумал и не сделал бы лодку, если бы не видел как на бревне по реке проплывает животное. Может именно увиденное ранее и натолкнуло его на мысль о возможном образе лодки, а имеющийся опыт работы топором, позволил придумать технологию ее изготовления, хотя между всеми описанными этапами могли пройти не годы, а столетия.
Со временем опыт превратился в знания (науку) о теории корабля, на основе которых сегодня проектируются и строятся все суда.
С другой стороны, любая обработка информации всегда когда-то заканчивается энергетическим выходом – работой.
Сколько бы человек ни думал он все равно рано или поздно превратит результаты мышления в энергетический выход, даже если он будет сводиться к тому, чтобы рассказать о придуманном кому-либо, или же написать об этом. Во всех случаях человек будет тратить энергию и генерировать управляющую программу в первом случае для мышц речевого аппарата, а во втором – для костно-мышечной системы, выполняющей запись текста. Просто обработка информации без ее материализации через энергетический выход из системы не имеет смысла, хотя собственно процесс обработки информации и сопряжен с затратами энергии (вспомним выражение «голова раскалилась от мыслей», однако в данном варианте энергия расходуется внутри системы без выхода в окружающую среду). Голова профессора Доуэля не имела бы никакого смысла (не могла быть придумана), если бы она только мыслила и не материализовывала результаты обработки информации в виде бесед о надуманном (вывод информации из нее для последующего использования в работе был возможен только через разговор, а это физическая работа мышц речевого аппарата). Аналогичный смысл имеет и работа современного компьютера, но об этом будет сказано в следующих разделах.
В данной схеме самым сложным моментом является понимание условия независимости от энергообеспечения системы S0.. Человек должен постоянно потреблять продукты питания – пополнять свою энергетическую базу. Поэтому, пока он через контакт с информационным полем приобрел бы возможность самостоятельно добывать себе пищу он бы просто умер от голода. Однако природа позаботилась о том, чтобы на начальном этапе данная схема превращения информации в работу не была связана со временем. Для этого поддержание энергетического баланса выполняется силами родителей, а интенсивность накопления опыта и знаний обеспечивает школа. Схема превращения информации в работу начинает реализовываться в описанном виде только после того, когда человек становится взрослым, хотя длительность этого взросления весьма индивидуальна (бывают гении, а бывают глупцы). Это конечно весьма примитивное объяснение, но оно помогает понять принцип работы данной схемы на уровне ассоциаций.
1.3 |
Аналитические определения вариантов «единичных работопроизводящих систем выполнения физического труда» |
Данные выше определения понятий «работа» и «работопроизводящая система» дают возможность сформулировать на их основе аналитические определения основных структурных составляющих современного производства. Для этого достаточно рассмотреть варианты развития унитарной работопроизводящей системы, реализующей описанную выше схему превращения информации в энергетический выход.
1.3.1 |
Аналитические определения инструмента, механизма и «единичной инструментальной работопроизводящей системы выполнения физического труда» |
Люди обладают хотя и различными, но вполне определенными возможностями в реализации процесса превращения информации в работу. Средние способности человека в выполнении работы можно принять за мощность* киберсистемы S0 – Р (S0 ).
*Понятие мощность при этом следует понимать именно как способность делать что-либо.
Структурно Р(S0) складывается из мощностей составляющих подсистем S0 : (М0 , М1 , М2 , М3 ) т. е.
Р
где:
P(M0)
– способность
человека генерировать энергию
(Шварценегер, или маленький мальчик)
– «сила желудка»;
P(M1)
–
умственные
способности человека в генерации
информационного образа работы и
технологии ее выполнения, придумывании
чего-либо (интеллект – гений или
глупый);
P(M2)
– способность
управлять своей костно-мышечной
системой, навыки выполнения физической
работы, быстрота реакции и т.п. (мастер
или ученик);
P(M3)
– конструктивные
возможности костно-мышечной системы
в реализации спроектированной
технологии (виды деятельности, которые
доступны системе S0
).
Увеличивать мощность энергетического выхода (воздействия на окружающий мир) человек (система S0 ) в процессе эволюции научился различными путями.
Мощность составляющей М3 (Р(М3) – виды деятельности, определенные конструкцией его костно-мышечной системы) он увеличил, сняв конструктивные ограничения в выполнении работы, имеющиеся у М3, путем добавления к ней искусственной составляющей М3 . Такой простейшей составляющей стали орудия труда, не имеющие собственной энергетики – инструменты, механизмы.
Первобытный человек сделал себе каменный топор, наверное, потому, чтобы добывать еду и дрова для костра было удобнее, чем «голыми руками». Современный хирург не может делать операцию, пользуясь только руками – элементом собственной М3 , ему необходим скальпель – инструмент. Скальпель совершенствует его систему выполнения физической работы, расширяя виды возможной деятельности, а, следовательно, и, увеличивая мощность системы S0 в целом по результату выполненной работы, но не меняя при этом ее энергетического выхода из системы и схемы превращения информации в работу.
Ч
S0и
-

S0и: (M0, M1, M2, (M3 +∆M3 )),
где: ∆M3 – инструмент (механизм),
при этом Р(S0и) > Р(S0)
Р(M3+∆M3) > Р(M3) за счет расширения возможных видов выполняемой работы.
Смысл данного определения сводится к тому, что S0и является элементарной работопроизводящей системой, в которой процесс превращения информации в работу реализуется по схеме S0; источником энергии во всех случаях является подсистема М0 человека, но при этом генерация образа работы, технологии его реализации и отработка динамической управляющей программы (результаты работы составляющих М1 и М2 системы S0) осуществляются не применительно к возможностям системы М3 человека в чистом виде, а с учетом наличия у нее новой составляющей М3 (содержание команд, приходящих к мышцам, будет другим, а системы их генерации и передачи не изменятся).
В рамках сформулированного аналитического определения инструментальной работопроизводящей системы инструмент и механизм являются одинаковой по смыслу структурной составляющей ∆M3, если их рассматривать относительно влияния каждого на схему превращения информации в работу.
В реальной жизни инструмент и механизм чаще всего отличает принцип конструктивного устройства (сравните: гаечный ключ – инструмент и гидравлический домкрат – механизм; механизм сложнее по устройству, чем инструмент и имеет подвижные части). Однако это отличие весьма условно, поскольку на практике применяется и такое понятие, как механизированный инструмент, в котором оба термина слиты воедино.
В существующей технической литературе определения инструмента и механизма отличаются от сделанных выше. Так в Политехническом словаре [29] приводятся следующие варианты определений:
ИНСТРУМЕНТ (от лат. instrumentum – орудие) – в промышленности, в широком смысле слова, орудие для работы (инструмент кузнечный, слесарный, металлорежущий, деревообрабатывающий и т. п.). Различают ручной инструмент (долото, молоток, клещи и т. д.), станочный (резцы, фрезы, сверла и т.д.) и механизированный, в том числе с электрическим, гидравлическим или пневматическим приводом (так называемые, ручные машины – рубильные, сверлильные, клепальные и др.). Эта часть в определении входит в противоречие со сделанным выше определением, но суть противоречия будет показана при дальнейшем изложения материала. К инструментам относятся также некоторые приспособления, штампы, литейные модели, кокили. Особую группу составляет контрольно-измерительный инструмент: калибры, пробки, концевые меры длины, различные линейки, угольники, циркули и т. д.
МЕХАНИЗМ – совокупность неподвижно соединенных тел (звеньв), совершающих под воздействием приложенных сил определенные целесообразные движения. По структурно-конструктивным признакам различают механизмы: шарнирные (рычажные), кулачковые, зубчатые, клиновые, винтовые, фрикционные с гибкими звеньями, с гидравлическими и электрическими устройствами и прочие механизмы, в которых все точки имеют траектории, лежащие в одной плоскости (кривошипно-шатунные, кулачковые, планетарные, клиновые и т. п.). Механизмы могут иметь одну или более степеней свободы. Наибольшее распространение имеют механизмы с одной степенью свободы, в которых для определенности движения всех звеньев нужно задать закон движения одного звена; реже применяются механизмы с двумя степенями свободы (например, дифференцированные).
В основу определений понятий «инструмент» и «механизм», приведенных в «Политехническом словаре», положены только конструктивные особенности применяемых на практике механизмов и инструментов. При этом в ряде случаев примеры инструментов пересекаются с понятием «технологическая оснастка». В рамках же принятого кибернетического подхода к рассмотрению данных понятий важным является только вариант их влияния на процесс превращения информации в энергетический выход в работопроизводящей системе. А в этом смысле они одинаковы. Какой бы инструмент или механизм не был в руках у человека процесс превращения информации в работу будет происходить по одной и той же схеме: прием информации через глаза, уши и т. п.; генерация мозгом образа работы и технологии его реализации (статической управляющей программы (УП)) с помощью костно-мышечной системы человека с учетом дополнения ее инструментом (механизмом); передача под управлением головного мозга элементарных структурных единиц УП по каналам нервной системы к исполнительным элементам костно-мышечной системы (мышцам) с реализацией обратной связи (отработка динамической УП); энергетический выход (физическая работа в дискретном виде).
В научной литературе имеются более близкие к представленным в монографии определениям, инструмента и механизма, чем в политехническом словаре Так, по выражению известного американского кибернетика Дж. Вейценбаума [14], инструменты и механизмы – это протезы на руках или ногах у человека. В соответствии с данным определением они также только расширяют возможные варианты выполнения физической работы для костно-мышечной системы, не меняя схемы превращения информации в энергетический выход.
1.3.2 |
Аналитические определения машины и «единичной машинной работопроизводящей системы выполнения физического труда» |
Если человеку дать орудие труда, имеющее собственную искусственную энергетику – «мотор», то полученная в результате работопроизводящая система S0м будет обладать еще большей, по сравнению с инструментальной, мощностью – возможностью выполнения физической работы. Такое орудие труда будет не только расширять возможные виды деятельности человека, но и увеличивать его общий энергетический потенциал. С точки зрения принятых принципов классификации, к таким орудиям труда относятся искусственные системы, которые можно объединить общим термином «машины», а полученная в результате система является «машинной работопроизводящей системой выполнения физического труда». Аналитическое определение структуры и графическая пиктограмма системы S0м могут быть представлены следующим образом:
S0м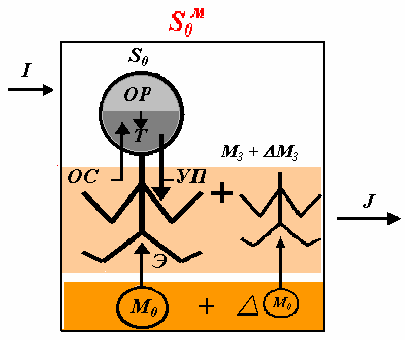
S0м
:
((M0
+M0),
M1,
M2,(M3
+
∆M3)
),
где
: (M0
+ M3
)
– машина, при
этом
Р(S0м)
> Р(S0и)
>
Р(S0) за
счет увеличения суммарного
энергетического потенциала системы
– Р(M0
+
∆M0)
> Р(M0
) и
расширения возможных видов деятельности
Р(M3
+
∆M3)
> Р(M3
).
|
|
С учетом сделанного определения инструмент с электрическим, гидравлическим или пневматическим приводом будет относиться к разряду машин, а не инструментов, так как он имеет собственную искусственную энергетику.
Сделанное определение машины также отличается от традиционных определений в большинстве технических источников. В частности, в том же Политехническом словаре термин «машина» (франц. - machine, лат.- machina) определяется как – механическое устройство с согласованно работающими частями, осуществляющее определенные целесообразные движения для преобразования энергии, материалов или информации. Основное предназначение машины – частичная или полная (это принципиальная ошибка, суть которой будет показана при рассмотрении понятия «автомат») замена производственных функций человека с целью облегчить труд и повысить его производительность.
В зависимости от выполняемых функций различают: энергетические машины, предназначенные для преобразования энергии, и рабочие машины, осуществляющие изменение формы, свойств, состояния и положения предмета труда, либо предназначенные для сбора, переработки и использования информации. К энергетическим машинам относятся электродвигатели и электрогенераторы, двигатели внутреннего сгорания, турбины, паровые машины и т. д. К рабочим машинам – технологические или механические орудия (металлорежущие станки, строительные, горные и др.), транспортные (автомобили, тепловозы, самолеты, теплоходы и др.), транспортирующие (конвейеры, элеваторы, подъемные краны, подъемники), вычислительные машины и устройства.
В таком виде определение также не соответствует принятой при рассмотрении материала концепции структурного построения работопроизводящих систем. В соответствии с кибернетическим определением главное это то, что машина, как и инструмент, не влияет на схему превращения информации в работу, а только меняет общее содержание энергетического выхода из машинной работопроизводящей системы, увеличивая ее мощность по сравнению с системами S0 и S0и, за счет наличия у нее искусственного энергетического источника M0.
Какой бы сложной не была машина, работать она может только под управлением человека.
Шофер грузового автомобиля способен перевозить груз гораздо более значительный, чем человек с тачкой за счет того, что у машины есть «мотор». Однако, как в первом, так и во втором случае, цель работы («какой груз и куда везти») формируются в голове у человека, а реализация сформированного образа работы сводится к управляющему воздействию человека на органы управления машины (руль, педали) или механизма (ручки управления) через его составляющую M3 и только под управлением из M2 . Увеличение возможных видов выполняемых работ и энергетического воздействия будет полностью зависеть от конструктивного устройства ∆M3 и M0 .
Нельзя объединять в один класс инструменты и машины для выполнения физического труда и инструменты и машины для обработки информации. В первом случае они повышают воздействие на материально поле, а во втором увеличивают мощность М1 и М2 в работах, связанных с обработкой информации. Поэтому, прежде чем перейти к рассмотрению инструментов и машин, связанных с обработкой информации, необходимо рассмотреть истоки появления понятий физического и умственного труда. Для этого в начале проанализируем варианты увеличения мощности работопроизводящих систем выполнения физического труда за счет организационных решений.
1.4 |
Аналитические определения «множественных работопроизводящих систем выполнения физического труда» |
Исторически появление всех описанных унитарных работопроизводящих систем выполнения физического труда относится к разным периодам времени. В то же время формирование понятия «производство» осуществлялось на основе количественного объединения различных работопроизводящих систем в одну общую множественную систему коллективного труда с помощью различных организационных решений. Рассмотрение способов объединения работопроизводящих систем позволяет проанализировать этапы эволюции производства в целом.
1.4.1 |
Аналитическое определение «работопроизводящей системы неразделенного коллективного физического труда» |
В качестве первого варианта объединения можно рассмотреть систему коллективного выполнения работы без использования документов. Такая множественная работопроизводящая система будет в дальнейшем классифицироваться как система неразделенного труда. В каком-то смысле она близка к существующему понятию «бригада». Поэтому для ее обозначения будет использоваться знак Sкб (система коллективного труда типа «бригада»). Работопроизводящая система Sкб включает не одну работопроизводящую систему S0, или S0и/S0м, а их некоторое множество. Аналитическое определение данной системы будет выглядеть как:
Sкб : (Sбр , S01 , S02 , S03 ,......, S0n ),
где: S0i ,- различные работопроизводящие системы (люди – S0, либо люди с инструментами, механизмами, или машинами – S0и/S0м).
Круглые скобки в теории множеств обозначают, что множество Sкб является упорядоченным, иначе говоря, у каждого члена S0i коллективной работопроизводящей системы Sкб есть свое место в технологическом процессе выполнения общей работы и свое «дело» – технологическая операция или т.п.
Основной
принцип организационного объединения
структурных составляющих в данном
варианте множественной работопроизводящей
системы состоит в том, что из всего
множества Sкб
выделяется
элемент Sбр
(руководитель
–
бригадир), имеющий![]() максимальную P(M1)
(самый «умный»). Он генерирует образ
работы J
в целом и структурирует его (определяет
декомпозицию J
= ( j1(i01)
+ j2(i02)
+ j3(i03
) .....+ jn(i0n)
)
для остальных работопроизводящих систем
S01
,
S02
,
S03
,......,
S0n,
снижая для них уровень требуемой мощности
Р0i(M1).
Иначе
говоря,
упрощая, на сколько это необходимо,
уровень сложности каждой отдельно
взятой работы, делая образ составляющей
работы ji(i0i)
таким, чтобы его мог однозначно
воспринимать каждый элемент s0i
из состава «бригады», и, впоследствии,
генерировать для полученного образа
технологию его выполнения, включая
«управляющую программу» для ее реализации
собственной
работопроизводящей
системой M3,
либо M3
+ ∆M3/(M0
+ ∆M0).
Получив от «бригадира» информацию
(jк(i0к))
об образе своей работы работопроизводящая
система s0к
превращает ее в энергетический выход
j0к,
делая часть общей работы J'.
максимальную P(M1)
(самый «умный»). Он генерирует образ
работы J
в целом и структурирует его (определяет
декомпозицию J
= ( j1(i01)
+ j2(i02)
+ j3(i03
) .....+ jn(i0n)
)
для остальных работопроизводящих систем
S01
,
S02
,
S03
,......,
S0n,
снижая для них уровень требуемой мощности
Р0i(M1).
Иначе
говоря,
упрощая, на сколько это необходимо,
уровень сложности каждой отдельно
взятой работы, делая образ составляющей
работы ji(i0i)
таким, чтобы его мог однозначно
воспринимать каждый элемент s0i
из состава «бригады», и, впоследствии,
генерировать для полученного образа
технологию его выполнения, включая
«управляющую программу» для ее реализации
собственной
работопроизводящей
системой M3,
либо M3
+ ∆M3/(M0
+ ∆M0).
Получив от «бригадира» информацию
(jк(i0к))
об образе своей работы работопроизводящая
система s0к
превращает ее в энергетический выход
j0к,
делая часть общей работы J'.
(Пример – бригада плотников, работающая без проектных документов).
П
Sкб
Sбр
Н
Sбр
Sк
б
б
|
б
|
|
|
|---|---|---|---|
Sк б : (Sбр, S01 , S02 , S03 ,......, S0n1 ), Sк б : (M0б , M1б, M2б , M3б),
|
б |
||
б
где:
M1б = M1бр – руководитель «бригады» – точнее его «серое вещество»
(результатом работы M1 бр является придуманный им образ работы J и технология ее выполнения Т б – J = ( j1(i01) + j2(i02) + j3(i03 ) .....+ jn(i0n) с помощью всех членов «бригады» – M3б; при этом придуманная технология (Тб) передается к исполнительной системе (M3б = S01 , S02 , S03 ,......, S0n) в виде простых команд (чаще всего через речь);
M2б – руководитель и все остальные члены «бригады»; при этом мощность М2бр определяется способностью руководителя отдавать команды (управлять) и способностью работопроизводящих членов «бригады» однозначно воспринимать команды и превращать их в работу на основе собственных профессиональных знаний; в функцию M2бр входит также анализ результатов работы – обратная связь; именно бригадир говорит, что сделано неверно и дает указание исправить;
M0б и M3б – суммарные средства выполнения физического труда членами «бригады».
Мощность системы Sкб возрастает по отношению к одному человеку S0 не только за счет суммирования мощностей P(M0б), P(M3б) всего множества элементов S0iб (много людей сделают более трудоемкую работу, чем один человек, если им выдать правильные задания), но и увеличения мощности Р(M1 бр) у Sбр относительно средней мощности Р(M1 ) члена бригады S0i (бригадир всегда лучше всех членов бригады знает как выполнить работу).
Данная работопроизводяшая система обладает своим пределом в увеличении мощности P(Sкб), т.к. с ростом количества членов S0i в бригаде M1бр и M2бр руководителя могут перестать справляться с задачей структуризации сгенерированного образа работы (Тб) и вывода общей технологии работ в форме простых команд (теряется управление). Это тот случай, когда руководителю бывает быстрее самому сделать что-либо, чем объяснить кому-то что он хочет.
Для того, чтобы рассмотреть следующий уровень организации коллективного труда необходимо сначала вернуться к рассмотренной ранее (см. п.1.2.5) схеме процесса превращения информации в работу, выделив из нее главное для множественной работопроизводящей системы звено – процесс генерации образа и технологии выполнения работы.
1.4.2 |
Схема превращения информации в работу в «работопроизводящей системе разделенного коллективного труда» |
В случае, когда человек формируется как работопроизводящая система в одиночку на протяжении всей своей жизни (скажем, условно, оказался с раннего детства на необитаемом острове или всю жизнь прожил один на хуторе), все этапы превращения информации в работу в каждом конкретном случае осуществляются последовательно в одной голове. Мощность системы Р(S0 ) в этом случае зависит от объема накопленных знаний – интеллектуальной мощности Р(M1), уровня сформировавшихся за время жизни профессиональных навыков – мощности Р(M2) и мощности работапроизводящей системы Р(M3) – физической силы человека, либо Р(M3 + M3) / Р(M3 + M0 + M3).
Мощность интеллектуальных составляющих Р(M1) и Р(M2) у человека меняется со временем по мере накопления знаний и опыта. У животных этот процесс продолжается только на протяжении жизни. Смерть убивает накопленный опыт и знания, оставляя лишь очень незначительную часть в молекуле ДНК (дезоксирибонуклеиновая кислота – наследственные знания). Именно эта часть знаний определяет скорость эволюции (развития мощности) всего живого.
Правда, необходимо отметить, что в природе существуют и такие биологические представители окружающего мира, которые вообще, по нашему пониманию, не подвержены эволюции – не накапливают знаний от контактов с окружающим миром. Примером таких биосистем, в частности, может быть животное класса морских членистоногих – мечехвост, который нисколько не изменился (в отличие от человека) ни внешне, ни с точки зрения образа существования на Земле как минимум за 350 млн. лет. Это наводит на мысль о том, что данному существу природой была дана самая постоянная задача взаимодействия с окружающим миром, а его конструкция была спроектирована природой как абсолютно совершенная для ее решения и не требовала какого-либо увеличения «мощности».
Человек, в отличие от животных, научился накапливать знания на внешних носителях информации (наскальных рисунках, рукописях, книгах, документах и т.п.). Именно внешние носители информации позволили будущим поколениям не ассимилировать в течение своей жизни уже кем–то сформулированные знания и опыт, а вводить их в мозг, например, читая книги, за гораздо меньший интервал времени, развивая в процессе своей жизни полученные знания собственным опытом.
В принципе, это главное, что отличает человека от обезьяны. Важность изобретения внешних носителей информации в развитии человечества можно проиллюстрировать хотя бы тем, что когда в старые времена завоеватели хотели уничтожить какой-либо народ, они в первую очередь сжигали их книги.
Изобретение внешних материальных носителей информации не только позволило бесконечно накапливать опыт и знания, а, следовательно, и усложнять уровень выполняемой работы человеком, но и стало основой разделения схемы превращения информации в работу между множеством различных проблемно-ориентированных людей. Это безгранично расширило возможности человека в повышении мощности процесса превращения информации в работу и послужило основой формирования таких понятий как труд физический, труд умственный и, в конечном счете, производство. (Сегодня мы запускаем ракеты в космос, хотя еще не так давно не умели летать, в принципе). Изобретение книг и документов как носителей промежуточных результатов работы с информацией в единой цепочке превращения информации в работу позволило включить в данный процесс (прежде всего для проектирования образа работы и технологии ее выполнения) теоретически не ограниченное количество «голов», вместо одной (рис.1.4.1). Сбором ощущений начали заниматься люди свободных профессий (SН). Результаты их работы материализовывались в виде художественной литературы, картин, музыкальных произведений и т. п. Анализ результатов их наблюдений за миром стал уделом фундаментальных ученых (SУ). В своих книгах они находили закономерности и способы объяснения всех явлений, наблюдаемых в мире. Описанные в их книгах данные знания формировали фундаментальные науки, на основе которых конструкторы (SК) изобретали новые объекты, отображая их в виде чертежей и подготавливая книги о способах выполнения проектирования (прикладные науки), а технологи (SТ) разрабатывали способы производства спроектированных объектов, материализуя их в форме технологической документации и описывая методы разработки технологии производства материальных объектов в технической литературе и документах (например, стандартах). Для материализации разработанных объектов с помощью множественных систем выполнения физического труда потребовались управленцы (SУП), которые транслировали разработанную технологию в команды для работопроизводящих составляющих – рабочих (SР), в форме заданий на работу.
1.4.3 |
Структурная схема «работопроизводящей системы разделенного коллективного физического труда» |
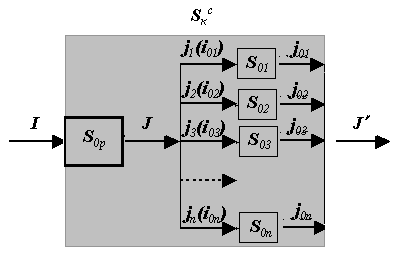
Разделение процесса превращения информации в работу между большим количеством людей на основе создания материального источника передачи результатов работы с информацией позволило только на основе организационных решений несравнимо больше повысить мощность системы коллективного труда по сравнению с первым уровнем множественной работопроизводящей системы – «бригадой». В качестве классификационного названия данный вариант системы превращения информации в работу можно определить как «множественная работопроизводящая система разделенного коллективного труда» – Sк рт.
Если представить множественную систему разделенного коллективного труда в виде кибернетической схемы превращения информации в работу по типу унитарной то получим,
Sк
рт
где в качестве М1 выступают ученые (S У), конструкторы (S К ) и технологи (S Т) – работники умственного труда, а основу М2, М3, и М0 составляет коллектив рабочих вместе со средствами труда (средствами технологического оснащения – инструментами, механизмами и машинами, реализующий процесс превращения спроектированного образа работы в энергетический выход – занимающийся физическим трудом. При этом статической управляющей программой для рабочих (М3) является разработанная в М1 технология, превращаемая в динамическую управляющую программу силами управленцев (SУП) с помощью организационных документов.
В современных условиях дискретность процесса превращения информации в работу бесконечно сложна. Однако сколько бы людей не участвовало в создании какого-либо материального объекта, работа любого из них есть часть процесса превращения информации в работу, структура которого, в целом, всегда постоянна (см. п.1.2.5).
Пиктограмму процесса создания материальных объектов силами множественной работопроизводящей системы разделенного труда можно представить следующим образом:

S
Sк
рт
Разделение процесса превращения информации в работу на части породило необходимость создания параллельно с созданием основного продукта «вторичных» материальных объектов как продуктов труда для обеспечения передачи промежуточных результатов переработки исходной информации между информационно-обрабатывающими структурными единицами. Так, создавая судно, ученые вынуждены выпускать необходимую методическую документацию; конструкторы изготавливать чертежи; технологи разрабатывать технологические документы, то есть не только выполнять работу по обработке информации на своем этапе процесса превращения информации в работу, но и выполнять замкнутый цикл, связанный с созданием «вторичных» материальных объектов – носителей информации (документации). Теоретически данные материальные объекты не имеют какого-либо пользовательского значения для человека. Они необходимы исключительно для реализации разделения процесса превращения информации в работу между большим количеством людей и как средство накопления информации для будущих поколений. Тем не менее, для того, чтобы организовать процесс изготовления каждого из промежуточных носителей информации, на определенном этапе необходимо было придумать его образ, способ (технологию) изготовления и сформировать навыки управления работопроизводящей системой в процессе его изготовления (например, научиться чертить с помощью кульмана, работать на компьютере и т.п.). Все это привело к тому, что процесс изготовления носителей информации для обеспечения коллективного труда развился в самостоятельное производство над порождающим производством материальных объектов. Производством научной документации стали заниматься научно-исследовательские институты – множественные работопроизводящие системы SУ . Изготовление конструкторской документации стало уделом множественных работопроизводящих систем SК – конструкторских бюро. Разработкой технологии изготовления стали заниматься технологи – система SТ. В процессе создания каждой из данных систем и ее последующего существования есть этап и структурная составляющая которая занимается образом производимого объекта и разрабатывает технологию его производства – М1. Так в конструкторском бюро – это служба стандартизации и нормоконтроля. Существующая в КБ постоянная структурная составляющая данная служба определяет состав и вид документации для задания образа спроектированного объекта и задает кому какие чертежи нужно выпустить. Служба М2 выполняет распределение сформированной технологии выпуска чертежей в конкретные отделы, а конструкторы М3 выполняют разработку чертежей в соответствии с разработанным графиком их выпуска.
В середине ХХ века трудоемкость работ, связанных с изготовлением носителей информации в информационно-обрабатывающих структурных единицах производственной системы, стала составлять до 60% от всего времени работы по созданию материального объекта. Вследствие чего появилась потребность сокращения трудоемкости изготовления документов на основе совершенствования системы их производства. Однако в отличие от систем изготовления материальных объектов в системах производства документов (носителей информации) главными направлениями увеличения мощности были не средства изготовления документов (физический труд), а разработка их образов (труд интеллектуальный). Поэтому развитие пошло по пути увеличения мощности систем выполнения работ, связанных с обработкой информации на основе создания инструментов, механизмов и машин для М1 .
1.5 |
Аналитические определения вариантов «работопроизводящих систем выполнения умственного труда» |
Решение любой задачи, связанной с умственной деятельностью можно представить как последовательность пошаговых действий по обработки унитарных единиц информации, которая называется алгоритмом.
Термин алгоримт происходит от слова algorithmi – латинской формы написания имени великого математика IX в. Аль Хорезми, который сформулировал правила выполнения арифметических действий. Первоначально под алгоритмами понимали только правила выполнения четырех арифметических действий над многозначными числами. В дальнейшем это понятие стали использовать для обозначения любой последовательности действий по обработке информационных единиц, приводящей к решению задачи.
Содержание алгоритма (состав пошаговых действий) зависит от содержания решаемой задачи, способа материального представления унитарной единицы исходной информации и конструкции информационно-обрабатывающей системы.
Не будем усложнять понимание этой мысли тем, как это происходит в мозге человека, поскольку точной конструкции этой структурной составляющей человека как информационно-обрабатывающей системы мы пока не знаем. Вспомним только, что человек с незапамятных времен искал способы упрощения выполнения операций с числами.
1.5.1 |
Инструмент и машина для обработки информации |
В качестве первого шага он стал использовать не только свою голову M1, но и собственную M3.
В произведениях Аристофана (конец V и начало VI в. до н. э.) приводятся свидетельства о чрезвычайной популярности счета больших чисел с помощью пальцев – элементов M3 человека. Такого рода «умственная работа» была неотъемлемой частью как организации хозяйственной деятельности на уровне государственных лиц, так и реализации товарообмена – торговли. По мнению ученых, именно пальцевый счет послужил основой развития десятичной системы счисления. Данный метод требовал меньших умственных, а, следовательно, и энергетических затрат на запоминание промежуточных операций при работе с числами, чем «счет в уме».
Как
вариант развития мощности выполнения
операций с числами по сравнению с
пальцевым счетом в литературе приводятся
описания одного из древнейших счетных
инструментов – абака. Абак был «походным
инструментом» греческих купцов и
представлял собой деревянную дощечку
с перегородками, на которой раскладывались
по определенным правилам камешки. Из
более близкой к сегодняшнему дню практики
нам известно использование канцелярских
счетов (фактически, сильно усовершенствованный
абак). В канцелярских счетах процесс
сложения р
канцелярские
счеты
И абак и канцелярские счеты являются искусственной составляющей ΔМ3 с помощью которой человек может выполнять действия по манипулированию ее составляющими. Однако, если в варианте ее использования в системе выполнения физического труда она увеличивала мощность составляющей М3 в выполнении физического труда, то в данном случае ее использование направлено на увеличение мощности составляющей М1 . Результат работы М3 с помощью Δ М3 направлен на выполнение шагового действия в алгоритме решения задач по обработке двух информационных единиц, представленных в виде числа. Использование составляющей Δ М3 совершенствует работу М1 позволяя заменить пальцевый счет на инструментальный. Поэтому, поскольку изначально данную работу выполняет подсистема М1 результат работы М3 с помощью Δ М3 (обозначим его как – f[М3 + ΔМ3]) увеличивает мощность подсистемы М1 , то есть является в соответствии с принятой системой классификации составляющих работопризводящих систем составляющей ΔМ1 – информационно-обрабатывающим инструментом.
По аналогии с определением развития работопроизводящих систем для выполнения физической работы, механизм для выполнения работы с информацией отличается от инструмента более сложным устройством.
В 1874 г. инженер Экспедиции заготовления государственных бумаг в Санкт-Петербурге В. Т. Однер предложил надежную и простую конструкцию колеса с переменным числом зубцов – знаменитое «колесо Однера». Оно стало основным узлом арифмометра – самого массового вычислительного механизма, выпускавшихся в нашей стране вплоть до 60-х годов XX века. В этих механизмах обработка чисел велась за счет манипулирования колесами с постоянным счетным количеством зубцов, т.е. информация также представлялась в виде чисел.
Д
арифмометр


 анные
инструменты и механизмы использовались
только в тех задачах, в которых алгоритм
решения мог быть представлен как
последовательность единичных шагов в
виде выполнения операций с числами,
поэтому данным инструментам правильнее
дать классификационное название
«числовые инструменты
и механизмы», а человека
вместе с числовым инструментом или
механизмом классифицировать как числовую
инструментальную
информационно-обрабатывающую
работапроизводящую систему.
анные
инструменты и механизмы использовались
только в тех задачах, в которых алгоритм
решения мог быть представлен как
последовательность единичных шагов в
виде выполнения операций с числами,
поэтому данным инструментам правильнее
дать классификационное название
«числовые инструменты
и механизмы», а человека
вместе с числовым инструментом или
механизмом классифицировать как числовую
инструментальную
информационно-обрабатывающую
работапроизводящую систему.
В варианте, когда для манипулирования элементами числового информационно-обрабатывающего механизма стал использоваться мотор (ΔМ0) систему можно классифицировать как машинную цифровую информационно-обрабатывающую работапроизводящую систему.
С развитием сложности задач умственной деятельности при разработке алгоритмов их решения появилась необходимость использовать в качестве унитарных единиц информации для определения пошагового действия не чисел, а аналоговых величин. На различных этапах развития использовались разные способы их материального представления для обеспечения возможности манипулирования ими с помощью составляющей М3 в зависимости от содержания решаемых задач.
Одним из наиболее известных инструментов, в котором единицы информации для манипулирования ими с помощью М3 в рамках выполнения шаговой операции алгоритма решения задачи представлялись в виде аналоговой величины, является логарифмическая линейка – самый распространенный счетный инструмент у инженеров, вплоть до 70-х годов ХХ века.
логарифмическая
линейка
Обрабатываемые единицы информации в ней представлялись не в виде чисел, а в виде их логарифмов с помощью специальной логарифмической шкалы.
Д ля
выполнения операции
умножения двух десятичных чисел с
помощью логарифмической линейки
пользователь, перемещением движка
линейки, фактически осуществлял
физическое совмещение (складывание)
отрезков двух различных длин – X
и У с целью определения
их
суммарной длины – X
+ Y
.
ля
выполнения операции
умножения двух десятичных чисел с
помощью логарифмической линейки
пользователь, перемещением движка
линейки, фактически осуществлял
физическое совмещение (складывание)
отрезков двух различных длин – X
и У с целью определения
их
суммарной длины – X
+ Y
.
Однако неподвижная и подвижная части логарифмической линейки были размечены таким образом, что единичное деление соответствовало числу равному klog n. В результате, отрезок неподвижной части линейки с количеством делений, равным Х, соответствовал числу log X, а отрезок на движке, определенный количеством делений, равным Y, соответствовал числу log Y. Следовательно, сумма двух отрезков Х + Y формировала число, равное logX + logY (физическая длина двух отрезков). В то же время из математики нам известно, что
logX + logY = log (X*Y),
таким образом, суммарная длина двух отрезков, полученная в результате их физического сложения, опосредованно через логарифмическую шкалу, будет определять произведение чисел X и Y. То есть, результат механического сложения двух отрезков (выполнения физического труда) через законы математики (определяющие законы обработки информационных единиц) будет соответствовать операции умножения двух чисел (труда умственного).
Варианты аналогового представления унитарных информационных единиц для выполнения шаговых действий в алгоритмах решения задач умственного труда постоянно развивались. В задачах по определению функций нескольких переменных стали использовать графики и номограммы. Совершенствование способов представления аналоговой информации привело к созданию механизмов для работы с ней. Примером одного из первых аналогового вычислительного механизма является интегрирующий прибор разработанный в 1878 г. польским математиком Абданк-Абакановичем для вычисления интеграла произвольной функции. В качестве аналоговой информации в данном механизме использовалось графическое изображение заданной функции. В настоящее время в приборах для выполнения операций по обработке информации в качестве способа ее аналогового представления используется электрический ток.
1.5.2 |
Инструментальная и машинная «единичные информационно-обрабатывающие работопроизводящие системы» |
По аналогии с числовыми счетными инструментами и механизмами человека вместе с аналоговым вычислительным инструментом или механизмом можно классифицировать как аналоговую инструментальную информационно-обрабатывающую работопроизводящуюсистему, а в варианте, если работа механизма будет выполняться с использованием внешнего искусственного источника энергии, как аналоговую машинную информационно-обрабатывающую работопроизводящую систему.
Числовые информационно-обрабатывающие системы отличаются от аналоговых разным влиянием на алгоритм пошаговых действий решения задач умственной деятельности. Их кибернетические схемы будут выглядеть одинаково. Однако при этом необходимо отметить, что в качестве квалификационного признака следует использовать признак единичная работопроизводящая система.
В отличие от унитарных работопроизводяших систем физ ического труда в кибернетической схеме и пиктограмме единичных информационно-обрабатывающих работопроизводящих систем, не должно быть энергетического выхода во внешний мир в виде физического воздействия на материальное поле (стрелка J справа должна отсутствовать), но зато должен быть выход j из М3, который через систему ∆М3 (инструмент/механизм) создает выход J = ∆ОР в виде шагового Образа Работы по обработке информации I в подсистеме М1. В данной системе ∆М3 не увеличивает энергетической мощности составляющей М3 в выполнении физической работы (воздействия на окружающий мир), а только совершенствует ее конструкцию, позволяя заменить пальцевый счет на инструментальный. В таком варианте результатом работы М3 является измененное состояние ∆М3. В результате, энергетический выход j (например, результаты работы по перемещению движка логарифмической линейки) возвращаются обратно в мозг в виде энергетического отображения числа, соответствующего результату выполненной вычислительной операции J = ОР – шагового действия реализации вычислительного алгоритма. Таким образом M1 есть система выработки шага в проектировании образа работы вне мозга (системы М1) в форме отображения измененного состояния М3, т.е. f(М3 + М3). Данный вывод позволяет представить аналитически структуру инструментальной информационно-обрабатывающей работопроизводящей системы и ее пиктограмму в следующем виде:
S0инф(и) : (M0 , (М1 + M1[f(М3 + М3)]), М2, М3),
или : S0инф(и) = S0 + M1[f(М3 + М3)], где M1 – это не материальный объект, а результат работы [f(М3 + М3)], увеличивающий мощность составляющей M1, выполненной с использованием энергии человека с помощью М3 через его М3 , под управлением М2
Р(М1 + M1[f(М3 + М3)]) > Р(М1).
S0инф(и)
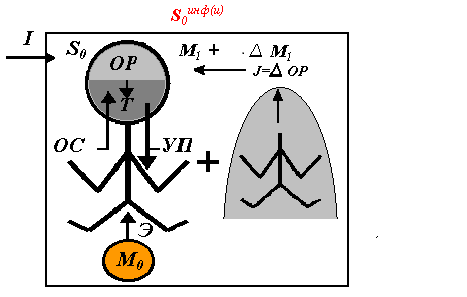
М1
+ M1[f(М3
+ М3)]
J=ΔOP


j
С точки зрения сравнения энергетического выхода (j) и входа (J) очевидно, что J > j, поскольку если бы человеку приходилось тратить больше энергии воздействуя на инструмент, чем на выполнение счета в уме, то он никогда бы его и не изобретал и не занимался бы его совершенствованием. Ранее было показано, что информационные единицы в мозгу человека представляют собой также материально-энергетические составляющие (энергетические маски нейронов), с которыми человек в процессе обработки информации производит определенные манипуляции, тратя на это собственную энергетику. В варианте использования искусственного счетного инструмента он использует вариант их материального отображения для возможности использования для манипуляции ими других энергетических источников.
S0инф(и/м)
S0инф(м) : (M0 + (М1 + M1[ f(М3+ М3+ М0)]) + М2 + М3), или : S0инф(м) = S0 + M1[ f(М3+ М3+ М0)] где: M1[ f(М3 + М3 + М0)] – машина для обработки информации, увеличивающая мощность составляющей M1, работа которой основывается на использовании энергии человека и внешнего источника М0 осуществляется с помощью М3 через его М3 . Р(М1 + M1[ f(М3+ М3+ М0)]) > Р(М1), а Р(S0инф(м)) > Р(S0инф(и) ) >Р(S0 ). |
М3
+
М0
j
М1+ΔМ1[f(М3+ΔM3
+
М0)] J=ΔOP
|
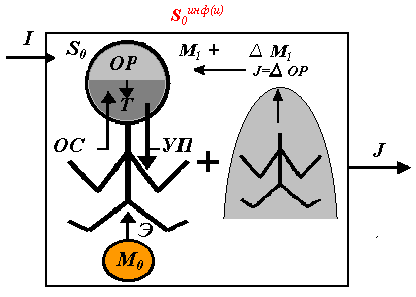




Мощность S0инф(м) S0инф(и) за счет того, что манипулирование физическими объектами выполняется не только с помощь М3 и М0, но и использует внешний источник энергии (М0), который совместно с соответствующей системой механизмов (М3) позволяет изменять состояние М3 быстрее и с меньшими затратами энергии.
Первые счетные машины фактически представляли собой арифмометры с электрическим приводом для приведения в действие счетного механизма. Современные вычислительные машины используют «электрические заряды» в качестве физических объектов для моделирования вычислительных операций путем манипулирования ими, а вместо механических конструкций для выполнения манипулирования – электронные схемы. В результате подобные вычислительные машины получили название электронных вычислительных машин. Однако особенности их классификации будут рассмотрены позднее.
1.5.3 |
«Множественные работопроизводящие системы выполнения умственного труда» |
S0инф(и/м)
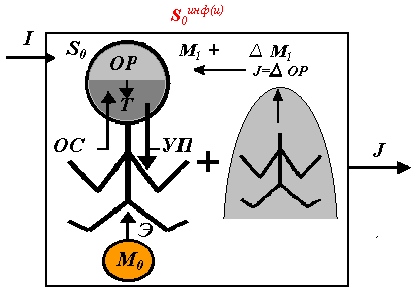
М1+ΔМ1[f(М3+ΔM3
+
М0)]
J=ΔOP


j

При этом особенностью данного вида труда является отсутствие функциональной зависимости от реального временем. Продолжительность процесса мышления (обработки информации) не связана жестко с процессом отработки технологии производства материального объекта. Технолог может разрабатывать технологию независимо от скорости ее реализации. Однако в системе разделенного коллективного труда появилась составляющая, связанная с отработкой УП по созданию материальных объектов (М2) – управленцы. Их работа заключается в выдаче управляющих команд в нужные моменты времени. Совершенствование их труда осуществлялось на основе создания инструментальных и машинных информационно-управляющих работопроизводящих систем, работающих в реальном режиме времени.
1.5.4 |
Инструментальные и машинные «единичные управляющие работопроизводящие системы» |
Система S0 может управлять связью с реальным режимом времени разными способами, например, отсчитывая интервалы времени в уме или отбивая ритм пальцами. Для повышения мощности составляющей М2, реализующей процесс генерации и выдачи управляющего воздействия на составляющую М3 , иначе говоря, обеспечивающей генерацию для нее системы биоэлектрических сигналов в реальном режиме времени (динамической управляющей программы), человек также стал использовать инструменты и машины.
В случае с М2 увеличение мощности за счет составляющих M2[ f( М3+ М3)] – инструмента и M2[ f(М3+ М3+ М0)] – машины будет выглядеть аналогично варианту с подсистемой М1. В частности, аналитическое описание и графическая пиктограмма инструментальной работопроизводящей системы управления могут быть представлены в следующем виде:
S 0уинф(и) : (M0 + М1 +( М2 + M2[ f (М3+ М3)]) + М 3), или : S0уинф(и) = S0 + M2[ f(М3+ М3)], где M2[f(М3+ М3)] – инструмент для обработки информации, увеличивающий мощность подсистемы M2, работа которого основывается на использовании энергии человека и осуществляется с помощью М3 через его М3 . Р(М2 + M2[ f(М3+ М3+ М0)]) > Р(М2) |
S0уинф(и)
М3
j
М2+ΔМ2[f(М3+ΔM3)] J=ΔOP |

В качестве M2[f(М3+М3)] в данном случае используется материальный объект М3 , воздействие на который с помощью М3 человека на основе энергетического обеспечения от М0 будет генерировать информационный выход, обеспечивающий повышение мощности процесса генерации управляющей программы (УП) в М2 .
Классическим вариантом M2[f(М3+М3)] являются часы. С помощью часов человек более просто определяет моменты выдачи команд на управление теми или иными действиями, затрачивая на обеспечение их работы (например, механический завод пружины) собственную энергию. Если как в случае с М1 попробовать описать разницу между инструментом и механизмом, то наиболее просто сравнить солнечные часы – инструмент и заводные пружинные часы – механизм. Другим примером может быть замена отбивания музыкантом ритма перед началом исполнения произведения пальцами – М3, на отбивание ритма с помощью метронома (М3). В этом случае метроном – информационно-управляющий механизм M2[f(М3+М3)]. Он также только дополняет подсистему М2 , поскольку его надо настроить завести и включить с помощью рук человека (М3), но увеличивать он будет мощность подсистемы М2, упрощая выдачу управляющих команд пальцам музыканта и улучшая качество исполнения.
В случае же, если дополнительные действия инструмента на управление достигается за счет использования внешнего источника энергии (скажем, электрические часы), то подобная составляющая может быть квалифицирована как управляющая машина, а человека вместе с ней можно классифицировать как машинную информационно-управляющую работопроизводящую систему.
S0инф(и)
S0уинф(м) : (M0 + М1 + ( М2 + M2 [ f(М3+ М3+ М0)]) + М3), или : S0уинф(м) = S0 +M2 [ f(М3+ М3+ М0)] где: M2 [ f(М3+ М3+ М0)] – машина для обработки информации, увеличивающая мощность составляющей M2, работа которой основывается на использовании энергии человека и искусственной составляющей М0 и осуществляется с помощью М3 через его М3 .
|
М3
j
М1+ΔМ1[f(ΔM3)] J=ΔOP |
|
||||||
Машинная информационно-управляющая работопроизводящая система мощнее инструментальной, так как в состоянии работать не зависимо от источника человеческой энергии:
Р(М2 + M2[ f(М3+ М3+ М0)]) > Р(М2 + M2[ f(М3+ М3]) > Р(М2).
|
|
|||||||
1.5.4 |
«Работопроизводящие системы коллективного управления»
|
|
||||||
Аналогично системам выполнения умственного труда в работопроизводящих системах коллективного управления в задачу каждой единичной системы управления входило не только выработка управляющей информации, но и физическая работа по подготовке документов – результатов отображения обработанной информации для передачи уже не в свою М2, а в М2 смежной системы управления. В результате кибернетическая схема информационно-управляющей системы в составе множественной должна выглядеть как:
S0уинф(и)
M2
[ f(М3+
М3+ М0)]
J=ΔOP
|
|
|||||||
1.6 |
Аналитическое определение понятия «производство» |
|
||||||
|
|
|
||||||
1.6.1 |
Структура «производства» как работопроизводящей системы разделенного коллективного труда созданиия материальных благ |
|
||||||




Реализация схемы превращения информации в работу в форме множественной системы разделенного коллективного труда привела к отделению этапов формирования научных знаний от непосредственных этапов, связанных с изготовлением материальных объектов, и стала основой появления множественной работопроизводящей системы разделенного труда получившей квалификационное название «производство». Причиной отделения стала разность в длительности этапов накопления знаний и их использования при производстве материальных объектов. В составе производства, как самостоятельной работопроизводящей системы, остались стадии проектирования образа работы, технологии изготовления продукции управления производственным процессом и реализации физического труда по переработке исходных материалов в вид создаваемой продукции. На этапе современного формирования структуры производства первая фаза выделенного процесса с течением времени сформировалась как инженерная подготовка производства (в современной документации используется также определение техническая подготовка производства – ТПП), а непосредственные процессы переработки материалов для получения продукции составили производственную фазу изготовления продукции (рис.1.6.1).
С учетом изложенного и, исходя из принятого в п.1.1. определения сути понятия производство и сделанных в п. 1.1.2 вариантов определения возможных работопроизводящих систем, аналитически производство можно рассматривать как некоторую сложную в структурном отношении множественную работопроизводящую систему коллективного труда (обозначим ее буквой F – от англ. faktory – фабрика, завод). Кибернетическая схема такой системы может выглядеть в виде:
F = Sпр :( М1 , М2 , М3 , М0 ),
где:
М1 – система получения задания на производство материального объекта, разработки его образа (конструкторы), проектирования
технологии изготовления (технологи); результатом их работы является рабочая конструкторская документация и технологическая документация;
М2 – система разработки организационно-технической документации – управленцы и профессиональная квалификация рабочих;
М3 – множественная работопроизводящая система;
М0 – энергообеспечение производственных составляющих.
Производство является проблемно-ориентированной работопроизводящей системой. Аналитически данное свойство можно определить как пересечение множеств S, J и M:
F=SJM,
где, S – множество единичных работопроизводящих систем (производительных сил s i ), входящих в состав производства; J – множество производственных процессов, которые могут быть выполнены на основе данных производительных сил S и M – множество материальных объектов, которые потенциально могут быть изготовлены с помощью J на основе S . При этом возможность изготовления любого объекта m определяется следующим условием:
С![]() ловесно
содержание математической записи
данного условия можно представить
следующим образом:
ловесно
содержание математической записи
данного условия можно представить
следующим образом:
«для любого материального объекта р из числа всего множества Р материальных объектов, которые потенциально способна производить система F, должно существовать некоторое подмножество s производственных структурных составляющих, принадлежащих множеству S, для которого множество j производственных процессов, необходимых для изготовления объекта р, является подмножеством множества J всех процессов, реализуемых в рамках системы F, и, следовательно, между s и j можно определить взаимооднозначное соответствие (построить матрицу | C j(s)|)» .
Ту же математическую запись можно трактовать и несколько иначе:
«объект р может быть изготовлен производственной системой F только тогда, когда для всего множества технологических процессов j , необходимых для его изготовления, в составе множества S работопроизводящих структурных составляющих системы F найдется соответствующее подмножество s работопроизводящих систем, способных их выполнить».
1.6.2 |
Структура и содержание «судостроительного производства» |
В существующих литературных источниках и документах проблемная ориентации производства трактуется несколько иначе. Так в ОСТ 5.0369-83 Судостроительное производство определяется как «совокупность взаимосвязанных процессов комплексной подготовки производства и постройки судов, характеризуемых следующими особенностями…(далее следует перечисление особенностей, которые нет необходимости анализировать)». Данное определение не соответствует приведенному выше аналитическому определению производства, поскольку в нем полностью отсутствуют понятие производительные силы. Привести определение судостроительного производства к сделанному варианту аналитического определения можно с помощью введения предметной ориентации. В частности, в соответствии с существующими нормативными документами (классификатор промышленной и сельскохозяйственной продукции) профилирующая продукция судостроительного производства (множество М) образует классы 74 (суда) и 64 (судовое оборудование). Кроме того, в вариантах описания структуры судостроительного предприятия оно представляется в виде множества ориентированных по виду продукции работопроизводящих систем (рис.1.6.2) - видов судостроительных производств, каждое из которых представляет собой множественную систему разделенного коллективного труда. С учетом изложенного, сформулированное выше аналитическое определение позволяет применять его для определения любого из них через совокупность технологических процессов, конкретные производственные структурные составляющие (например, сборочно-сварочный цех для сборочно-сварочного производства и вид продукции – секции, блоки) и вид производимой продукции (детали, секции, корпус и т.п.) (табл. 1.6.1) Таким образом, приведенное противоречие определения судостроительного производства в ОСТе можно рассматривать как редакционный недостаток.
1.7 |
Аналитическое определение понятия «подготовка производства» |
В рамках сделанного аналитического определения «производство» - это множество (J) потенциально возможных, а не реально происходящих во времени процессов. Кроме того, в реальной жизни «производство» –
21СУДОСТРОИТЕЛЬНОЕ ПРОИЗВОДСТВО (полного профиля) |
|||||||||||||||
22 |
23ОСНОВНОЕ ПРОИЗВОДСТВО |
24Вспомогательное производство |
|||||||||||||
25 |
26ВЕРФЬ |
27СУДОВОЕ МАШИНОСТРОЕНИЕ |
28МЕТАЛЛУРГИЯ |
29ОБЕСПЕЧЕНИЕ |
|||||||||||
Цехи |
Корпусообрабатывающий Сборочно-сварочный Корпусостроительный Трубомедницкий Судомонтажный Корпусодостроечный Малярный Деревообрабатывающий Такелажно-парусный Изоляционных работ Электромонтажный Контрагентские цехи, находящиеся на судах |
Механомонтажный Механосборочный Дельных вещей Арматурный Механизации и автоматизации
|
Сталелитейный Ццветного литья Кузнечно-прес-совый |
Ремонтно-механический Ремонтно-электротех-нический Ремонтно-строительный Ацетилено-кислородный Паросиловой Инструментальный Склады Транспортный цех Хозяйственный цех Центральная лаборатория |
|||||||||||
|
|||||||||||||||
ОСНОВНОЕ ПРОИЗВОДСТВО (ВЕРФЬ) |
|||||||||||||||
|
КОРПУСНОЕ ПРОИЗВОДСТВО |
СУДОМОНТАЖНОЕ ПРОИЗВОДСТВО |
29.2ДОСТРОЕЧНО ‒ ОТДЕЛОЧНЫЕ ПРОИЗВОДСТВА |
||||||||||||
Виды производств в соответствии с ОСТ5.0369-83 |
КОРПУСООБРАБАТЫВАЮЩЕЕ: корпусообрабатывающий цех, склад деталей |
СБОРОЧНО-СВАРОЧНОЕ: сборочно-сварочный цех |
КОРПУСОСТРОИТЕЛЬНОЕ: корпусостроительный (стапельный) цех |
ТРУБООБРАБАТЫВАЮЩЕЕ: трубомедницкий цех |
МЕХАНОМОНТАЖНОЕ: судомонтажный цех |
ПР-ВО ИЗДЕЛЕЙ КДН: корпусодостроечный цех |
ПР-ВО И МОНТАЖ СЛЕСАРНО-КОРПУСНОГО НАСЫЩЕНИЯ Корпусодостроечный цех |
ПР-ВО И МОНТАЖ ИЗДЕЛИЙ ОТДЕЛКИ СУДОВЫХ ПОМЕЩЕНИЙ деревообрабатывающий и такелажно-парусный цехи |
ПР-ВО ПО МОНТАЖУ ИЗОЛЯЦИИ И ЛАКОКРАСОЧНЫМ ПОКРЫТИЯМ малярный цех и цех изоляционных работ |
ПР-ВО ПО ИСПЫТАНИЯМ И СДАЧЕ СУДОВ цех шефмонтажных работ |
ПР-ВО ЭЛЕКТРОМОНТАЖНОЕ электромонтажный цех |
||||
Рис. 1.6.2 Структура судостроительного предприятия полного профиля
постоянно изменяющаяся во времени работопроизводящая система. В какой-то мере каждое развитое производство подобно живым организмам. С течением времени меняется структура производства, структурные составляющие, организация выполнения работ и т.п. (происходит техническое развитие производства). Производство, подобно живым системам, существует во времени непрерывно, независимо от того, какой конкретный объект оно производит в каждый момент времени. Каждый день люди приходят на работу, запускают станки и, в принципе, не всегда знают какую работу им предстоит выполнять. То есть, для производства характерно наличие определенной функции поддержания его в динамическом равновесии в каждый момент времени (в частности, энергетическое обеспечение – M0. Что же касается реализации процесса создания конкретных материальных объектов, то это становится возможным путем соответствующей его настройки. На практике этот этап получил название подготовки производства.
1.7.1 |
Аналитические определения структуры и содержания «технической подготовки производства» |
Сущность процесса настройки состоит в том, что в зависимости от типа создаваемого материального объекта, применительно к данному производству подсистемой M1 определяется вся информация, необходимая M2 и структурным составляющим производства M3 для генерации управляющей информации в обеспечение выполнения ими конкретных производственных процессов, и, определяющая потребность производственной системы в материально-энергетическом обеспечении для сохранения ее динамического равновесия. Аналитически это можно описать следующим образом.
В общем случае состояние производства в любой момент времени характеризуется набором значений переменных факторов, описывающих как состояние реализуемых в системе подцелей (изготовление деталей корпуса, сборка секций, монтаж судовых механизмов и т.п.), так и теми аспектами процесса их решения, которые с одной стороны сопутствуют, а с другой – влияют на достижение конечных подцелей.
Например, если x1, x2, …., xi, ……xn - полная совокупность переменных факторов некоторой системы производство F, то ее состояние Fфt в момент времени t можно представить в виде:
Fфt, = x1(t), x2(t), …., xi(t), …… xn(t),
где: xi(t) - значение переменного фактора xi в момент времени t.
В процессе строительства «производство» проходит через ряд промежуточных состояний
F фt0,
Fфt1,……,
Fфti
,…..Fфtj
фt0,
Fфt1,……,
Fфti
,…..Fфtj
,
где: Fфti фактическое промежуточное состояние системы F в момент времени ti.
Любой переменный фактор в тот или иной текущий момент времени имеет определенное и отличное от предыдущего значение. Причем, начальному, каждому промежуточному и конечному состоянию системы «производство» будет соответствовать система значений переменных факторов:
x 1фt0,
x2ф
t0,……,
xiф
t0
,….. xjф
t0
1фt0,
x2ф
t0,……,
xiф
t0
,….. xjф
t0
……………………………………….
x1фti, x2ф ti,……, xiф ti ,….. xjф ti
……………………………………….
x1фtj, x2ф tj,……, xiф tj ,….. xjф tj
,
где: xiф t j - фактическое значение фактора xi в момент времени t j.
Фактическое состояние производства в любой момент времени t i является функцией значений совокупности переменных факторов, описывающих систему, и может быть представлено в виде:
Fфt i = f(x1фt i, x2ф t i,……, xiф t i ,….. xjф t i)
Особенностью всех процедур настройки производства на создание конкретной продукции является то, что все они выполняются до начала работ по обработке исходных материалов. Именно поэтому данный этап создания продукции и получил название «подготовка производства». Естественно, что конкретное содержание подготовки производства зависит от множества причин и, прежде всего, от типа создаваемого объекта и уровня развития производственной системы. Тем не менее, в общем случае, с учетом сформулированного выше определения понятия «производство», аналитически понятие «подготовка производства» можно определить следующим образом (рис.1.7.1):
Подготовка производства – это этап определения информации I, обеспечивающей генерацию средствами выполнения технологических процессов – (множества S - структурных составляющих производства как работопроизводящей системы) управляющей информации [ i ] для выполнения всего множества J технологических процессов по созданию материальных объектов производства mM, а так же решение вопросов материально-энергетического обеспечения, требуемого развития производства и отображения сгенерированной информации I в виде, пригодном для восприятия всеми структурными составляющими производственной системы S.
1.7.2 |
Отраслевая система комплексной подготовки судостроительного производства |
В учебной литературе основная суть комплексной подготовки производства определяется как разработка документации. Однако документация необходима только для реализации возможности передачи спроектированной инженерами информации рабочим.
В существующих нормативных документах (ОСТ.5.0369-83) термин «подготовка производства» определяется как - «комплексная система, обеспечивающая готовность предприятия к выполнению программы постройки судов высшей категории качества с заданными технико-экономическими показателями». Данное определение не согласуется полностью с приведенным выше определением понятия производство. Для его уточнения рассмотрим «производство» прежде всего как работопроизводящую систему.
Применительно к особенностям судостроительного производства ОСТ5.0369-83 определяет подготовку производства как комплексную систему, включающую: конструкторскую, технологическую, организационную, материально-техническую подготовку производства, а также решение вопросов планирования капитального строительства и реконструкции предприятия, включая подготовку кадров. В соответствии с принятым определением подготовки производства, основное содержание информационной настройки
судостроительного предприятия в рамках каждой из составляющих комплексной подготовки судостроительного предприятия приведено на рис.1.7.2.
Для определения аналитических границ каждой из составляющих можно воспользоваться положениями эротетической логики (раздел современной символической логики, исследующий логико-семантические свойства вопросительных предложений) [32]. В соответствии с основными положениями данной научной дисциплины процесс определения информации Ij можно представить в форме поиска ответа:
const(C1, С2, …,Сn) на вопрос вида: [x1,х2,….,хn] К,
-
где:
[x1,х2,….,хn] –
вопросный оператор, представляющий собой набор вопросительных слов типа «как», «на чем», «с помощью чего» и т.п.;
К -
матрица вопросного оператора, соответствующая фрагменту осмысленного предложения.
Например, словесно вопрос вида [x1,х2,….,хn] К может выглядеть следующим образом: [как?, на каком оборудовании?, и с помощью какой технологической оснастки?] должен быть изготовлен лист наружной обшивки, имеющий двойную кривизну.
Вопросный оператор [x1,х2,….,хn] однозначно определяет смысл процедуры определения информации для настройки производственной системы и, следовательно, может быть использован в качестве ее классификатора. В частности, для конструкторской подготовки основными вопросными операторами могут быть:
[как?] должен выглядеть объект производства;
[какими свойствами?] должен обладать объект производства и его отдельные составляющие;
для технологической подготовки:
[как?, на каком оборудовании?, и с помощью какой технологической оснастки?] должен быть изготовлен объект вида производства;
для организационной:
[когда?] должен быть изготовлен объект вида производства;
[кому?] должен быть передан изготовленный объект вида производства;
и т.д.
Понятно, что определение необходимой информации для каждой составляющей комплексной подготовки производства может выполняться
только с помощью соответствующей работопроизводящей системы – Системы Выполнения Подготовки Производства (СВПП). Одной из наиболее важных составляющих в комплексной подготовке судостроительного производства является технологическая подготовка.
В существующей научно-технической и учебной литературе, рассматривающей вопросы технологической подготовки судостроительного производства, определения ТПП строительства судов имеют различную трактовку (табл.1.7.1). Однако все они смысловую основу термина трактуют через основную цель ТПП, в качестве которой определяют обеспечение полной технологической готовности судостроительного предприятия к выполнению производственной программы по строительству судов (наличие на предприятии комплекта технической документации и средств технологического оснащения, обеспечивающих строительство судов), что не расходится со сделанным выше аналитическим определением. В качестве аналитического классификатора задач ТПП в соответствии с принятыми положениями эротетической логики может быть использован вопросный оператор вида КАК?(С ПОМОЩЬЮ ЧЕГО?).
Сущность понятия СИСТЕМА ТЕХНОЛОГИЧЕСКОЙ ПОДГОТОВКИ ПРОИЗВОДСТВА стандартом ЕСТПП определяется как система выполнения ТПП, для которой правила организации и управления ТПП регламентированы специальной нормативно-технической документацией, разработанной в соответствии с Государственными стандартами ЕСТПП.
Если в этом определении под понятием система подразумевать людей и необходимые для их совместной работы по выпуску документации, предусмотренные содержанием ТПП, средства организации связи и технологического оснащения, то данное определение будет полностью соответствовать сделанному ранее определению работопроизводящей системы, которая осуществляет генерацию определенной информации и производство ее носителей.
1.8 |
Определение вариантов совершенствования производства |
В процессе своего существования производство, как множественная работопроизводящая система разделенного труда постоянно совершнстовалась с цель повышения своей мощности. В начале это были этапы механизации и комплексной механизации производства.
Суть механизации производства сводилась к внедрению в производственный процесс машин и механизмов для выполнения каких-либо работ с целью увеличения производительности и снижения трудоемкости ручного человеческого труда при выполнении отдельных операций. Мощность производственной системы в данном случае увеличивалась уже в реальном исчислении и определялась ростом выпуска производимой продукции и снижением ее себестоимости.
На этапе комплексной механизации внедрение машин и механизмов, осуществлялось сбалансировано относительно всех технологических процессов, необходимых для выпуска изготавливаемой в рамках производственной системы продукции. При этом суть сбалансированности сводилась к тому, что производительность всего комплекса машин и оборудования увеличивалась пропорционально в рамках требований всего комплекса операций, связанных с созданием конечного или промежуточного объекта производства.
Объем внедрения средств механизации определялся таким образом, чтобы время ее выполнения соответствовало общему ритму изготовления продукции. Иначе говоря, чтобы на любой позиции не было ни простоев, ни задержки последующих операций.
Базовым структурным элементом совершенствования подсистемы М3 в этом случае стали комплексно-механизированные лини.
Рассматривая данные этапы развития производственной системы важно отметить, что внедрение средств механизации осуществлялось не только в области выполнения физического труда, но и в сфере интеллектуального производства (выполнение проектных работ и выпуск необходимой документации) путем внедрения инструментов и машин для совершенствования как этапов работы по непосредственной обработке информации (интеллектуальной деятельности), так и для обеспечения снижения трудоемкости работ, связанных с выпуском документации.
Аналитические определения механизмов и машин, разрабатываемых для совершенствования работ по выпуску документации, ничем не отличаются от ранее описанных определений инструмента и машины для выполнения физического труда, поскольку выпуск документации – это тот же физический труд (полная замкнутая схема превращения информации в энергетический выход через М3). Примерами инструмента являются кульман конструктора, а машины - электрическая печатающая машинка. То же касается инструментов и машин, связанных с обработкой информации. Поэтому, использование понятий механизированная и комплексно-механизированная работопроизводящая система вполне применимо как для классификации всего производства в целом, так и отдельных ее составляющих.
Инструментальные и машинные работопроизводящие системы обработки информации мощнее человека с точки зрения выполняемой работы, но они так же имеют свои ограничения в увеличении мощности, так как в них присутствует составляющая, полностью зависящая от человека. Поэтому в своем дальнейшем развитии производство пошло по пути внедрения автоматизированных работопроизводящих систем. Это стало началом этапов автоматизации и комплексной автоматизации.
Комплексная автоматизация теоретически явилась началом конца развития схемы разделенного труда в производстве. Причиной этому послужил тот факт, что рост уровня мощности автоматизированных работопроизводящих структурных единиц теоретически ни чем не ограничен (см. далее п. 2.6.3). Поэтому, если в процессе эволюции производства рост его мощности обусловливал увеличение числа структурных составляющих (рис.1.8.1), то с развитием средств автоматизации интеллектуального и физического труда, в принципе, возможен вариант, когда все производство будет состоять из одной автоматизированной системы проектирования образа работы и управляющих программ для его реализации (А1) и одной автоматической работопроизводящей системы (А0, А2, А3), его реализующей. Определенной аналогией данному варианту могут служить современные заводы автоматы, в которых не используется труд людей в процессе производства продукции. Завод автомат – это объединение искусственных составляющих (А0, А2, А3).
2 |
Принципы устройства средств автоматизации производства |
В литературе, посвященной вопросам возникновения и развития автоматов, их появление чаще всего связывается с автоматическими игрушками, которые были изобретены еще в глубокой древности. Однако с точки зрения принятого кибернетического принципа классификации работопроизводящих систем, большинство из них являлись всего лишь сложными механизмами, так как основой их энергетической составляющей была энергетика человека (человек выполнял завод пружины игрушки), и он же выполнял управляющее воздействие на них через свою M3, хотя бы в объеме указания начала работы (подавал команду «пуск»). Появление автоматов в производстве, не противоречащих рассмотренным принципам классификации работопроизводящих систем, началось лишь со 2-й половины ХХ века.
2.1 |
Общие положения, связанные с автоматизацией производства |
|||
|
|
|||
Главная причина создания автоматизированных работопроизводящих систем для развития производства была связана со стремлением снять ограничения мощности человека как в области генерации образа работы (мощность P(M1)), так и в процессах генерации и передачи управляющего воздействия в M2 к элементам структурной составляющей M3.
В качестве примера ограниченной мощности человека в области проектирования образа работы достаточно вспомнить, что человек не может думать постоянно день и ночь. Ему необходим отдых. С точки зрения иллюстрации ограничений мощности M2 характерным примером является утомляемость человека в управлении своей работопроизводящей составляющей (мы знаем, что у уставшего человека притупляются двигательные реакции, а следовательно теряется качество выполнения физической работы). Ну, а ограничения M3 связаны как со скоростью отработки управляющих команд, так и с возможностями влияния на качество и содержание работы обусловленными ее конструкцией. В частности, Левша был единичным экземпляром уникального работника, а в современном производстве таких иногда требуется тысячи. Создать их можно только на основе замены человека искусственной работопроизводящей системой, в которой совершенствование подсистемы, соответствующей M3, будет, в принципе, ничем не ограничено.
Помимо чисто технических, со временем появились и социальные факторы необходимости внедрения в производство автоматических работопроизводящих систем, связанные с тем, что в процессы изготовления производимой продукции стали входить технологические операции, выполнение которых способно оказывать вред здоровью людей. Данный фактор требовал уже не увеличения «мощности» человека в выполнении работы, а принципиального исключения его из производственного процесса.
2.1.2 |
Кибернетические схемы автоматических и автоматизированных работопроизводящих систем |
Учитывая, что процесс превращения информационного воздействия в энергетический выход может реализовываться только в рамках одной и той же кибернетической схемы, автомат (или их некоторое множество, которое в данном случае может рассматриваться как одна единица – множественная работопроизводящая система) должен иметь полный набор искусственных составляющих, соответствующих М0 , М1 , М2 , М3 человека и, следовательно, кибернетическая схема автомата может отличаться от схемы человека только обозначением структурных составляющих.
Пользуясь принятой системой аналитического описания структурных составляющих работопроизводящей системы, аналитическое представление автоматической – SА будет иметь вид:
SА = ( А0 + А1+ А2 + А3 ), или SА : (А0 , А1 , А2 , А3 ),
г
где: А1
–
система восприятия информационного
поля (входной информации I
) и генерации «образа работы Т»
– статической управляющей программы; А2
– система
восприятия «образа работы Т
–
статической управляющей программы»,
генерации динамической УП и реализация
ее передачи к исполнительным механизмам; А3
–
система превращения энергии в
энергетический выход под воздействием
динамической УП - управляемая машина; А0
–
генератор энергии.
SА де:
де:
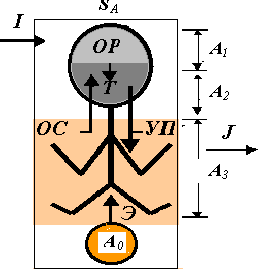
Мощность автоматической работопроизводящей киберсистемы Р(SA) целиком и полностью зависит от ее конструктивного устройства и, следовательно, теоретически ничем не ограничена. Наиболее показательным примером данного фактора является рост мощности (скорости вычислений) электронных вычислительных машин, который произошел за последние 50 лет. Так, если производительность первых ЭЦВМ (типа «Урал») составляла 100 арифметических и логических операций в секунду, то скорость современных компьютеров измеряется в миллионах и даже в миллиардах операций.
Неограниченные возможности увеличения мощности автоматических структурных составляющих производственной системы за счет их конструктивного совершенствования являются одним из важнейших факторов в анализе перспектив развития производства (см. п. 1.8). Однако автоматических работопроизводящих систем, соответствующих описанной кибернетической схеме, в производстве пока не существует. Реальные системы не могут выполнять процесс превращения информации в работу без участия человека. Полная автоматизация возможна только в случаях, когда искусственная система способна сама воспринимать окружающий мир, накапливать знания, генерировать образ работы и технологию ее выполнения, а затем реализовывать его в виде энергетического выхода из системы для воздействия на материальное поле, самостоятельно управляя расходом генерируемой в системе энергией.
В теоретическом плане к таким работопроизводящим системам относятся современные интеллектуальные автоматы (например, интеллектуальные роботы, направляемые в космос), которые воспринимают окружающий мир через свои устройства приема информации и на основе ее обработки генерируют образ работы, после чего выполняют конкретные действия по его реализации на основе генерируемой системой энергии (ядерный реактор, или энергетические батареи). Однако применительно к проблеме автоматизации производства рассматривать подобные системы пока не имеет смысла из-за отсутствия перспективы их реального применения в ближайшее время.
На практике для автоматизации производства используются искусственные работопроизводящие системы, которые сами не контактируют с информационным полем и не генерируют образ работы, а могут работать только при определенном взаимодействии с человеком. В существующих работопроизводящих системах для автоматизации выполнения физического труда таким человеком является оператор. В целом процесс управления расходом внутренней для них энергии осуществляется без участия человека, но разработка образа работы (реализация функции А1), выполняется системой, которую можно назвать инженерной подготовкой производства. Ввод задания на начало работы (организация чтения управляющей программы) и необходимая настройка подсистемы А2 выполняется не работопроизводящей системой, а оператором. Всю информацию об «образе работы» (Т) она получает от человека в форме приемлемого для нее энергетического представления (нажатие на кнопку пуска, команда голосом, ввод управляющей программы с перфоленты, флеш-карты и т.п.), а возвращает ему информацию для обратной связи так же в энергетической форме, пригодной для восприятия уже человеком (например, в виде отображения на экране монитора). Мощность подобной работопроизводящей системы (вид и объем выполняемой работы) полностью определяется мощностью системы генерации для нее образа работы (статической управляющей программы) системой SУП и мощностью системы его реализации – SАВ. Незначительное влияние человека (S0) на мощность процесса за счет управления на уровне обратной связи можно не рассматривать. С учетом изложенного подобную работопроизводящую систему нельзя считать автоматической. На практике для их определения используется термин «автоматизированная система», при этом структурно автоматизированная работопроизводящая система, в отличие от автоматической, включает в обязательном порядке отдельно систему SУП (генерации образа работы (Т) в виде статической управляющей программы (УП) ), выполняющую функцию А1 , и систему SАВ , реализующую функции А0, А2 , А3. Конструктивно SАВ представляет собой объединение двух автоматизированных машин – информационно-управляющую машину (А2) и машину выполнения физической работы (А3). Необходимая связь между SУП и SАВ осуществляется через человека-оператора (система S0 ).
Аналитическое представление и графическую пиктограмму автоматизированной работопроизводящей системы выполнения физического труда можно представить следующим образом:
SАВ = SУП : (А1) ; S0 ; SАВ : ( А0 , А2 , А3 ),
где SУП (А1) – система генерации статической управляющей программы (УП);
S0 – оператор;
|
SAВ – |
автоматизированное оборудование – работопроизводящая система выполнения физической работы, |
|
||
|---|---|---|---|---|---|
SУП
(А1) |
S0
Iст=
J |
SАВ
|
|||

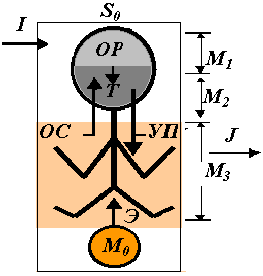
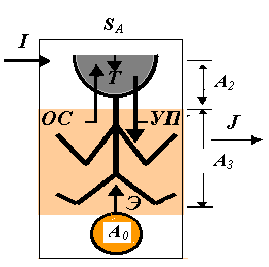
при этом Iст= J – информация об образе работы, которая генерируется вне автоматизированной работопроизводящей системы подсистемой SУП (А1), и вводится оператором в виде статической управляющей программы в систему SАВ с учетом дополнительной настройки.
Подсистема SУП (А1) – это автоматизированная система выполнения интеллектуального труда. Ранее (п. 1.5.5) было показано, что это труд ученых, конструкторов, технологов. Именно результатом их совместного разделенного труда является образ работы (Т), который реализует автоматизированная работопроизводящая система SАВ. Хронологически первыми в производстве появились системы SАВ . Однако их развитие без автоматизации SУП (А1) оказалось невозможным.
2.1.3 |
Определение смысла комплексной автоматизации производства |
Появление в составе производства автоматизированных структурных составляющих (автоматического оборудования, автоматических линий и т.п.) положило начало новому уровню развития производства – автоматизированному. Аналогично этапу комплексной механизации средства автоматизации стали объединяться в структурные технологические составляющие, состоящие из некоторого множества средств автоматизации технологических процессов. Однако в отличие от определения комплексно-механизированного уровня производства данный процесс не породил современное понятие комплексной автоматизации. Дело в том, что под комплексной автоматизацией в настоящее время понимается не просто внедрение в производство сложных автоматизированных комплексов, а комплексное использование некоторого сбалансированного множества средств автоматизации производственных технологических процессов и инженерной подготовки. Причиной этому послужил тот факт, что для большинства автоматического оборудования невозможна эффективная разработка управляющих программ без использования современных средств автоматизации инженерного труда в составе системы SУП (А1) . Поэтому внедрение любого нового автоматизированного оборудования в сфере реализации технологических процессов (в системе SАВ) обязательно предполагает необходимость внедрения средств автоматизации в сфере инженерной подготовки производства (в системе SУП (А1))для расчетного получения статических управляющих программ – Iст= J (Т).
На начальных периодах автоматизации производства экономически целесообразный объем внедрения средств автоматизации инженерного труда (под инженерами далее будут пониматься участники выполнения всех работ, связанных с инженерной подготовкой производства материальной продукции: отраслевые ученые, конструкторы, технологи, управленцы) определялся именно возможностью разработки с их помощью статических управляющих программ для всего комплекса технологического оборудования, внедренного для автоматизации технологических процессов.
Автоматизация собственно инженерного труда не обеспечивала получения необходимого экономического эффекта. Стоимость создания средств автоматизации была значительной, а экономически она могла окупаться только за счет сокращения численности работающих инженеров. Учитывая низкую стоимость инженерного труда, первые попытки автоматизации работы конструкторов, технологов, или управленцев носили больше познавательный характер. Трудоемкость подготовки исходных данных для систем автоматизации этих видов инженерного труда съедала весь эффект от сокращения трудоемкости выполнения инженерных расчетов и выпуска документации.
Внедрение средств автоматизации реализации технологических процессов обеспечивало получение экономического эффекта не только от повышения производительности и качества выполняемых работ, а в ряде случаев и вследствие того, что они становились единственным средством их технологического обеспечения. Поэтому, создавая автоматизированное технологическое оборудование, необходимо было параллельно разрабатывать и средства расчетного получения для него статических управляющих программ. Стоимость создания и эксплуатации данных средств снимала часть экономического эффекта от внедрения средств автоматизации технологических процессов, но при этом их эксплуатация обеспечивала формирование исходных данных для разработки средств автоматизации смежных инженерных задач. В результате на начальных стадиях комплексной автоматизации производства определение состава задач, решаемых с помощью компьютера в сфере инженерной подготовки, приобрело комплексный подход (см. далее п..2.6.3 ).
Учитывая это, при рассмотрении теоретических основ создания средств автоматизации производства необходимо разделить их на два класса: средства автоматизации инженерного труда и средства автоматизации выполнения технологических процессов. В каждом конкретном случае смысл «автоматизации» будет сводиться либо к замене труда инженеров автоматизированными работопроизводящими системами, либо труда рабочих соответствующими автоматизированными работопроизводящими системами.
Основное содержание труда инженеров сводится к обработке информации, разработке проектных решений и последующего их отображения в документации. Поэтому автоматизация труда инженеров осуществляется на основе создания автоматизированных информационно-обрабатывающих работопроизводящих систем и систем материализации разработанных решений в виде технологической документации и статических управляющих программ для автоматизированных технологических составляющих производственной системы. Технической основой таких систем стали Средства Вычислительной Техники (СВТ). Автоматизация труда физического выполняется с помощью создания и внедрения автоматизированного оборудования для выполнения технологических процессов – Средств Технологического Оснащения (СТО).
2.2 |
Теоретические основы создания автоматизированных информационно-обрабатывающих работопроизводящих систем |
К средствам вычислительной техники относятся вычислительные машины и периферийные устройства отображения информации, подключаемые к ним (принтеры, графопостроители, сканеры, подробнее см. п. ). При этом термин – вычислительные машины, используемый на практике, не соответствует кибернетическому определению машины, принятому в монографии. В соответствии с ним вычислительная машина – это вычислительный механизм с собственным источником энергетического обеспечения – мотором). Однако ранее (см. п. 1.5.1) мы определяли, что механизм для обработки информации способен выполнять операции по реализации только шагового действия в алгоритме решения задачи. В существующей практике описания средств автоматизации инженерных задач термин «вычислительная машина» используется для описания информационно-обрабатывающего оборудования, способного выполнять обработку информации без участия человека не в виде пошаговой реализации алгоритма, а в объеме задачи целиком. Это стало возможным за счет того, что вычислительные машины способны отрабатывать алгоритм решения задачи полностью и выдавать результат обработки в виде, который в состоянии воспринимать как человек, так и автоматизированные системы выполнения физического труда. Однако перед тем как рассмотреть как это делается, имеет смысл сначала ввести применяемую классификацию вычислительных машин.
2.2.1 |
Классификация автоматизированного оборудования для обработки информации (вычислительных машин)
|
В п. 1.5.3 были сформулированы кибернетические определения инструментальной и машинной информационно-обрабатывающих работопроизводящих систем. При этом было показано, что процедура счета во всех случаях сводится к манипулированию какими-либо физическими объектами; в первом случае с помощью М3 , ΔМ3 и М0 человека, а во втором с подключением для инструмента манипуляции внешнего источника энергии – ΔМ0. В соответствии с определениями автоматической и автоматизированной работопроизводящих систем данное манипулирование должно осуществляться в них без участия человека, при этом обработка информации должна выполняться не в объеме шагового действия, а в объеме законченной задачи.
Оборудование, способное выполнять подобную работу, можно разделить на два класса в зависимости от вида унитарных структурных единиц информации, используемых для реализации шагового действия решаемой задачи. В соответствии с существующей классификацией автоматизированные системы для обработки информации делятся на аналоговые информационно-обрабатывающие системы и цифровые иформационно-обрабатывающие системы. Появления машинных информационно-обрабатывающих систем, в которых в качестве аналоговой информации стало использоваться напряжение электрического тока или дискретные единицы (импульсы) электрического тока привели сначала к появлению аналоговых и электронно-цифровых вычислительных машин, а затем и гибридных моделей – аналогово-числовых. Данные вычислительные машины стали основой создания автоматизированных информационно-обрабатывающих систем.
2.2.2 |
Принцип работы аналоговых вычислительных машин |
Аналоговые вычислительные машины (АВМ) в качестве исходной информации используют напряжение электрического тока. Принцип их работы состоит в том, что каждому мгновенному значению переменной величины, участвующей в исходных соотношениях, ставится в соответствие мгновенное значение другой (машинной) величины, часто отличающейся от исходной физической природой и масштабным коэффициентом.
Определение «мгновенное» используется в большинстве литературных источников только потому, что скорость выполнения вычислительной операции в аналоговом вычислительном устройстве определяется скоростью прохождения тока через проводник, которая определяется скоростью света и сопротивлением вычислительного устройства.
Каждой элементарной математической операции над машинными величинами, как правило, соответствует некоторый физический закон, устанавливающий математические зависимости между физическими величинами на входе и выходе решающего элемента (например, законы Ома и Кирхгофа для электрических цепей, выражение для эффекта Холла, Лоренцовой силы и т. д.). Поэтому конструктивно АВМ состоят из некоторого числа решающих элементов. Все решающие элементы АВМ по характеру выполняемых математических операций делятся на линейные, нелинейные и логические. Линейные решающие элементы выполняют операции суммирования, интегрирования, перемены знака, умножения на постоянную величину и т.п. Нелинейные (функциональные преобразователи) воспроизводят нелинейные зависимости. При этом решающие элементы могут создаваться для воспроизведения функции от одного, двух и большего числа аргументов. К логическим решающим элементам относятся устройства непрерывной логики, например, предназначенные для выделения наибольшей или наименьшей из нескольких величин. Все логические устройства обычно объединяются в одном, получившем название устройства параллельной логики. Оно снабжается своим наборным полем для соединения отдельных логических устройств между собой с остальными решающими элементами АВМ.
П
Рис.
2.2.1 Общий вид АВМ для решения задач с
постоянным алгоритмом
Н

В соответствии с особенностями конструкции АВМ в основном применяются при решении задач контроля и управления. Например, для оценки экономической эффективности энергетических систем, и автоматического управления исполнительными механизмами, когда закон управления заранее не определён, а заданы лишь некоторый критерий оптимальности и граничные условия. Особое быстродействие позволяет им, многократно решая систему уравнений, описывающих управляемый процесс, учитывая его текущие характеристики, за короткое время «просматривать» большое число вариантов решений, отличающихся значениями параметров, подлежащих изменению при управлении процессом. В результате, опережая ход процесса, АВМ прогнозирует сигналы управления, которые могут обеспечить необходимое качество протекания процесса. Найденные машиной значения передаются на регулирующие устройства, например в виде положений их установок, после чего поиск наилучшего варианта продолжается. В режиме опережающего анализа АВМ выполняют функции либо машин-советчиков, когда оператор пользуется результатами полученных на машине расчётов для ручного или полуавтоматического управления, либо управляющих машин, автоматически учитывающих текущие характеристики процесса и управляющих им по оптимальным показателям. Выбор наилучшего режима технологического процесса осуществляется также самонастраивающимися математическими машинами в режиме опережающего анализа.
Особой отличительной чертой АВМ является быстродействие в варианте решения задач с постоянным алгоритмом. Если прибегнуть к аллегории реализации процесса счета в форме манипулирования физическими объектами, то процесс счета в АВМ сводится к «протаскиванию» исходного физического объекта (электрического тока с заданным напряжением) через группу устройств, в каждом из которых напряжение меняется в соответствии с заданным алгоритмом решения задачи. Однако такое быстродействие достигается за счет потери точности и сложности физической реализации алгоритма расчета. Поэтому, в качестве технической основы для создания автоматизированных информационно-обрабатывающих работопроизводящих систем для автоматизации производства они применения не нашли. В результате основными средствами автоматизации инженерной деятельности стали электронные цифровые вычислительные машины – ЭЦВМ.
2.2.3 |
Классификационные признаки электронных цифровых вычислительных устройств |
В ЭЦВМ обработка информации осуществляется в виде числовых моделей реальных объектов. В качестве объектов для манипулирования с целью моделирования операций счета в электронных вычислительных устройствах (ЭВУ) используются дискретные энергетические единицы – «электрические импульсы тока».
Электрический ток в проводнике можно рассматривать как некоторую последовательность импульсов прямоугольной волны
(рис. 2.2.2).
18.2.1.1.1.1.1Рис. 1.2.13.
Последовательность импульсов
прямоугольной волны
Рис.2.2.2.
Импульсы прямоугольной волны
электрического тока для моделирования
операции счета![]()
Группируя электрические импульсы можно моделировать различные числовые значения и производить с полученными числовыми моделями различные операции путем манипулирования электрическими сигналами. Для выполнения такого манипулирования составляющая М3 человека (как в случае с канцелярскими счетами) не годится. Человек не может управлять движением электрических импульсов с помощью рук, затрачивая на это только собственную энергию (М0). Поэтому электронного счетного инструмента не может быть создано в принципе. В электронных счетных устройствах необходимо наличие промежуточной искусственной системы между человеком и объектами манипулирования (электрическими импульсами) для выполнения данной работы. Такая система должна не только осуществлять перемещение (транспорт) «электрических сигналов» по логике, позволяющей результат манипуляции воспринимать как результат обработки информационных единиц, но и обеспечивать запоминание и отображение результатов данного манипулирования в виде, который способен воспринимать человек. Естественно, что транспорт электрических сигналов – это физическая работа, а, следовательно, ее выполнение требует потребления энергии. Счетные устройства для манипулирования электрическими импульсами используют собственную энергию (аккумуляторные батареи, электросеть и т.п.), поэтому в соответствии с рассмотренными ранее принципами классификации (см. п.1.5.1) они являются электронно-вычислительными машинами. (Обратите внимание на описанную выше разницу между понятиями вычислительная машина и вычислительный автомат).
2.2.4 |
Принцип работы электронных цифровых вычислительных устройств |
Для того чтобы понять как выполняется счет в электронных вычислительных машинах, необходимо с начала рассмотреть принцип работы простых вычислительных устройств (уровня электронных калькуляторов), но только не с технической, а с кибернетической точки зрения. Логику необходимого манипулирования «электрическими зарядами» для моделирования операций счета рассмотрим с помощью простого аллегорического примера.
Пусть имеется пять дверей, которые могут находиться как в закрытом, так и в открытом положении. В начальном положении комбинация открытых и закрытых дверей может быть любой. Некоторому человеку (назовем его «ходоком») предписано выполнять физическую работу, суть которой (логика) сводится к следующему: «проходить циклически через все двери справа налево и открывать первую встретившуюся закрытую дверь, закрывая за собой все открытые, после чего возвращаться в начало – к первой двери».
На рисунке 2.2.3 показана исходная комбинация из двух открытых и трех закрытых деверей и то, как изменялось состояние дверей после каждого прохода «ходока».
Если оценивать выполняемую им работу (как физическую) по длине траектории, то она не носит характера регулярного изменения. В то же время, если посмотреть на изменение комбинации открытых и закрытых дверей с помощью логики двоичной математики (как на работу по преобразованию информационного образа – кода комбинации дверей), то налицо будет реализация операции десятичного вычитания.
В частности, если для описания комбинационного состояния дверей принять обозначение открытой двери в виде «0», а для закрытой – «1», то исходное состояние дверей будет соответствовать следующей числовой строке:
0 0 1 1 1
Добавив условие, что каждой значащей единице числовой строки соответствует десятичное число, равное 2n , получаем, что код исходной комбинации дверей можно представить как десятичное число 7
0 0 1 1 1
23 22 21 20
4 2 1 = 7.
Применив данный принцип для оценки изменения комбинации дверей (см.рис. 2.2.3) можно увидеть, что результатом каждого очередного прохода «ходока» является уменьшение десятичного кода комбинации дверей на единицу.
Изменим логику работы, выполняемой ходоком на противоположную. Пусть он будет: «…закрывать первую встретившуюся открытую дверь, открывая все закрытые по пути следования». Изменение кода дверей после каждого прохода будет соответствовать варианту его увеличения на единицу (см. рис 2.2.3).
Теперь, пусть через комбинацию дверей проходит не один человек, а несколько (от 1-го до 4-х). Их расположение относительно дверей, как и комбинация дверей, так же может быть любым. Каждый начинает движение с той двери, напротив которой он стоит. При этом, если «ходок» подходит к открытой двери, просто закрывает ее и возвращается в начало движения, а если она закрыта, то он ее открывает и идет к соседней слева двери, выполняя работу по той же логике, пока не закроет первую открытую по пути дверь.
Д
Исходное
состояние дверей
Комбинация
«ходоков»
на первом этапе
1-ый «ходок»
– открыл первую закрытую дверь и
пошел к соседней – второй закрытой
2-ой «ходок»
–
на первом этапе открыл третью закрытую
дверь и пошел к четвертой, которая
была открытой
на втором проходе
– 1-ый ходок
открыл вторую
закрытую дверь и пошел к соседней
слева - третьей, которая стала открытой
2-й ходок
– на втором проходе закрыл четвертую
открытую дверь и дальше не пошел
на третьем проход
– 1-й ходок закрыл третью, которую до
него открыл второй ходок и дальше не
пошел
![]()
![]()
![]()


Если теперь для обозначения кодов комбинации дверей и комбинации «ходоков» применить описанную выше логику, то получится:
0 1 1 1
23 22 21 20
4 2 1 = 7 – код комбинации дверей
0 1 0 1
23 22 21 20
4 0 1 = 5 – код комбинации ходоков,
а сформированный код комбинации дверей после прохождения через них «ходоков» будет иметь вид:
1 1 0 0
23 22 21 20
8 4 0 0 = 12
Следовательно, результат физической работы, выполненной группой «ходоков», можно представить и как результат выполнения арифметической операции по определению суммы двух чисел – кода комбинации дверей (7) и кода комбинации «ходоков» (5). При этом средством сохранения и отображения полученного результата для восприятия ее человеком является сформированная новая комбинация дверей. Человек может воспринимать ее как число, через описанную логику двоичного приведения.
Нетрудно проверить, что данный вывод будет справедлив для всех возможных комбинаций.
Описанную логику прохода через двери (выполнения физической работы) можно воспроизвести и в электронных устройствах.
Возьмем вместо двери электронный элемент, который способен находиться в двух различных энергетических состояниях. Физически он состоит из двух составляющих, которые могут пропускать импульсы тока. В то же время в каждый фиксированный момент времени только одна из них в состоянии пропускать ток. Когда в активный период на составляющую, не проводящую в данный момент времени ток, подается электрический импульс, в нем индуктируется ток, а в другой составляющей прерывается. Таким образом, элемент, в целом, может всегда находиться в одном из двух противоположных состояний и переходить из одного состояния в другое и обратно (аналогично тому, когда дверь открыта или закрыта) после каждого прохождения через него импульса тока. В вычислительных устройствах такими элементами являются триггеры. Их основная роль сводится к запоминанию того, на какую из двух составляющих в последний раз был подан импульс тока (в каком состоянии «0» или «1» он был). Фактически тригер – это устройство хранения одного бита информации (дверь открыта, или закрыта).
В
Рис.2.2.4. Ламповый
триггер
Конструктивное построение триггеров постоянно совершенствовалось. В основе лежало применение новой элементной базы. В частности, следующим этапом построения триггеров стало применение полупроводников (обычно биполярные и полевые транзисторы). Сегодня наука ушла бесконечно дальше. В октябре 1998-го года датские ученые продемонстрировали функционирование бинарного триггера, построенного на основе одного атома кремния и двух атомов водорода. Принцип его действия сводился к тому, что с помощью туннельного микроскопа из триггера удалялся один атом водорода, вследствие чего оставшийся атом водорода «переключался» в одно из двух состояний.
Для того, чтобы с помощью триггеров смоделировать число (комбинацию из закрытых и открытых дверей), необходимо использовать не один, а несколько триггеров, реализовав их схемное объединение. Такое схемное объединение на практике называется регистром. Настраивая энергетическое состояние триггеров, можно моделировать в нем любое число. Процесс настройки называется вводом информации (в частности, числа) в вычислительное устройство. Принцип выполнения процедуры ввода имеет давнюю историю своего развития.
Необходимое физическое состояние триггеров для моделирования числа можно описать с помощью числовой строки из нулей и единиц. На первых ЭВМ инженеры сидели за пультами и днями напролет заносили в регистры соответствующие строки. Процесс этот был малопроизводительным и порождал большое количество ошибок: каждый бит информации, т.е. единица или ноль, требовали персонального внимания, а скорость манипуляций человека, в отличие от машины, увеличить нельзя. Поэтому для сокращения трудоемкости ввода информации в ЭВМ были созданы методы «сворачивания» информации.
Первым шагом стал переход на системы счисления с кратным двум основанием: восьмеричную и шестнадцатеричную. Были разработаны клавиатуры, основу которых составляли специальные диодные матрицы. При нажатии на одну клавишу в регистр посылался не один бит, а сразу восемь (байт). А поскольку в состав клавиатуры входило до 256 клавиш, то появилась возможность вводить энергетические маски не только чисел, но и букв. Например, после набора на клавиатуре знаков B8 9E 03 в регистре автоматически формировалась следующая энергетическая настройка триггеров:
1000 1001 1110 0000 0011
В 8 9 Е 0 3
Очевидно, что с помощью регистра можно настраивать как положение дверей (первое число), так и положение «ходоков».
Для управления движением электрических импульсов с целью реализации логики их прохождения через триггеры (аналогично логики прохода через двери) в реальных вычислительных устройствах используются электронные схемы, в основе построения которых лежат специальные логические устройства, называемые логическими вентилями. С их помощью происходит формирование траектории движения поступающих в них электрических импульсов или остановка. По сути они чем-то напоминают светофоры.
Простейшей является вентильная схема, передающая "единицу" при поступлении на нее "нуля", и наоборот. Это вентиль «НЕТ» (рис. 2.2.5). Вентиль имеет один вход А и один выход В.
Рис.
2.2.5. Вентильная схема
«НЕТ»
Его работа описывается следующими выражениями:
НЕТ (0) = 1, на входе 0, на выходе 1 (никто не подошел к светофору, зажигается «зеленый свет» и уходит тот, кто стоял в очереди); |
НЕТ (1)= 0, на входе 1, на выходе 0 («ходок» подошел к светофору, но дальше не пошел – «красный свет» – он выполнил свою работу); |
Данный вентиль инициализирует ввод систему импульса в варианте, когда из триггера напротив не проходит импульса.
Другая разновидность – вентильная схема «И» (рис. 2.2.6) имеет два входа и один выход. Это модель того варианта прохода « ходоков», когда первым через дверь проходит «ходок», расположенный напротив двери, а затем приходит тот, что справа.

Рис.
2.2.6. Вентильная схема «И»
Схема «И» передает "единицу" в том и только в том случае, если оба ее входа – "единицы"; в противном случае эта схема передает "нуль". То есть, для того, что бы включился «зеленый цвет» необходимо, чтобы к светофору одновременно подошел «ходок», расположенный напротив двери и «ходок», пришедший справа.
Работа вентиля "И" описывается следующими выражениями:
И (0, 0)=0, никто не подошел к светофору, никто дальше не пошел; |
И (0, 1)=0, «ходока» напротив двери не было, а к светофору подошел «ходок» справа, но дальше не пошел – «красный свет»; |
И (1, 0)=0, к светофору подошел «ходок» напротив двери, а справа не подощел, дальше никто не пошел – «красный свет»; |
И (1, 1) = 1, два «ходока» подошли к схеме справа и слева, а дальше включился «зеленый цвет» и один пошел к двери напротив; |
В
Рис.
2.2.7. Вентильная схема «ИЛИ»
Однако она передает "единицу" всякий раз, когда любой из ее входов или оба входа сразу являются "единицами"; в противном случае она передает "нуль". То есть «зеленый свет» загорается всякий раз, когда любой из «ходаков» или оба сразу подходят к светофору.
Работа этой вентильной схемы описывается следующими выражениями:
ИЛИ (0, 0)=0, никто не подошел к схеме, никто дальше не пошел; |
|
ИЛИ (0, 1) = 1, никто не подошел к схеме справа, но подошел справа и пошел дальше; |
|
ИЛИ (1, 0) = 1, 1 «ходок» подошел к схеме слева, а справа не подошел, дальше никто не пошел; |
|
ИЛИ (1, 1) = 1, «ходоки» подошли к светофору справа и слева, а дальше пошел только один. |
|
Е
D
S
Рис. 2.2.8. Схема однобитового сумматора
ЭВМ
Данный однобитовый двоичный сумматор имеет три входа: A, В и С и два выхода: S и D. А и В представляют два бита, которые должны быть сложены, а С – перенос, который мог бы быть порожден аналогичным сумматором, находящимся, справа от изображенного здесь. S – полученная сумма, D – перенос. Таким образом, реализуются правила энергетического сложения, соответствующие описанной ранее логике прохода «ходоков» через двери для операции суммирования, а именно:
A
B
C
0+0 = 0, никто не подошел к открытой двери, никто не вышел |
0+1 = 1, никто не подошел к закрытой двери, дверь осталась закрытой |
1+0 = 1, «ходок» подошел к открытой двери, закрыл ее, но дальше не пошел |
1+1 = 0, и перенос 1 – «ходок» подошел к закрытой двери, открыл ее и пошел к соседней искать открытую. |
Выполнение операции сложения двух чисел рассмотрим на примере работы двухрегистрового сумматора (рис. 2.2.9). В данном устройстве моделируется описанная ранее логика сложения кода дверей и кода положения «ходаков».
` n -разрядный регистр первого слагаемого |
||||||||||||||||
n разряд |
………………. |
3 |
2 -й разряд |
1 -й разряд |
||||||||||||
|
||||||||||||||||
n - разрядный регистр второго слагаемого |
||||||||||||||||
n |
………………. |
3 |
2 -й разряд |
1 -й разряд |
||||||||||||
|
|
|
|
|
||||||||||||
А |
В |
С |
|
А |
В |
С |
А |
В |
С |
А |
В |
С |
||||
СМn |
|
СМ3 |
СМ2 |
СМ1 |
||||||||||||
D |
S |
|
D |
S |
D |
S |
D |
S |
||||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
||||||||||||
n разряд |
|
3-й разряд |
2-й разряд |
1-й разряд |
||||||||||||
n – разрядный регистр результата |
||||||||||||||||
 -й
разряд
-й
разряд разряд
разряд -й
разряд
-й
разряд



Рис. 2.2.9. Схема
работы двухрегистрового сумматора
Посмотрим, как будет проходить процесс сложения двух чисел, рассмотренных ранее на примере работы «ходаков». В данном случае настройка регистров будет иметь вид, показанный на рис. 2.2.10.
ячейка 1 n 0 |
регистр первого слагаемого |
ячейка 14 0 |
ячейка 13 1 |
ячейка 12 1 |
ячейка 11 1 |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
ячейка 2 n 0 |
регистр второго слагаемого |
ячейка 24 0 |
ячейка 23 1 |
ячейка 22 0 |
ячейка 21 1 |
||||||||||||||||||||||||||||||||||||||||
|
|
|
1 1 1 |
1 0 1 |
1 1 0 |
||||||||||||||||||||||||||||||||||||||||
|
|
0 1 |
1 1 |
1 0 |
1 0 |
||||||||||||||||||||||||||||||||||||||||
0 |
регистр суммы |
1 |
1 |
0 |
0 |
||||||||||||||||||||||||||||||||||||||||
 0
0
1
0
0
1
Рис.
2.2.10 Схема прохождения импульсов при
сложении двух чисел в сумматоре
Дальнейший процесс сложения будет происходить следующим образом:
1. Сложение я 11 и я 22: из ячейки 11 на вход А сумматора 1 (СМ1) поступит 1, на вход В поступит 1 из ячейки 21. На вход С ничего не поступит. В результате будет реализована следующая логика сложения:
1+1=0 и перенос 1на вход С соседнего сумматора (СМ2).
В варианте с «ходоками» – это ситуация, когда «ходок» (я 21) подошел к закрытой двери, открыл ее и пошел к соседней.
2. При сложении я 12 и я 22 на вход А сумматора СМ2 поступит 1, на вход В поступит 0. В результате сложения получится 1, но на вход С поступит 1 от переноса с соседнего регистра, поэтому на выходе из сумматора будет 0 и единица переноса на вход С сумматора СМ3.
0+1=1+1 (от переноса)=0 + 1 на сумматор СМ3.
(«ходок» (я 21) подошел к закрытой двери, открыл ее и пошел к соседней).
3. Аналогично будут происходить процессы сложения я 13 и я 23
1+1=0+1 (от переноса)=1
и я 14 и я 24
0+0=0+1(от переноса)
(ходок (я 23) подошел к открытой двери, закрыл ее и дальше не пошел).
Содержание результирующей ячейки после завершения сложения двух регистров будет иметь вид:
1100 = 12 как и в варианте с прохождением « ходаков».
Очевидно, что если с помощью электронных схем можно реализовать логику энергетического сложения, моделирующую операции сложения для двух чисел, то возможно построение и любых других схем для выполнения операций над числами.
Тем
не менее, необходимо отметить, что в
реальных вычислительных устройствах
большинство операций реализуется через
операцию сложения. Так, например,
умножение n
![]() n можно реализовать путем n – раз прибавить
к n число n. Квадратный корень из числа
N вычисляется с помощью алгоритма
Ньютона. В общем случае данный алгоритм
вычисления представляет собой быстро
сходящуюся (при хорошем начальном
приближении) серию итераций: ai+1
=
0.5 * ( ai
+
x/ai
),
где i
– номер итерации. В случае поиска
квадратного корня для целого числа его
реализация будет выглядеть в виде
следующей последовательности
арифметических операций:
n можно реализовать путем n – раз прибавить
к n число n. Квадратный корень из числа
N вычисляется с помощью алгоритма
Ньютона. В общем случае данный алгоритм
вычисления представляет собой быстро
сходящуюся (при хорошем начальном
приближении) серию итераций: ai+1
=
0.5 * ( ai
+
x/ai
),
где i
– номер итерации. В случае поиска
квадратного корня для целого числа его
реализация будет выглядеть в виде
следующей последовательности
арифметических операций:
Выбирается первое приближение;
Первое приближение умножается само на себя;
Полученное произведение складывается с числом N;
Новая сумма делится на удвоенное значение первого приближения;
Оценивается разность между предыдущим приближением и новым;
Если разность велика – делается улучшение приближения и процесс повторяется, если мала – процесс заканчивается.
Подводя итог рассмотрению принципов работы электронных вычислительных устройств можно выделить главное: «работа по выполнению операций счета в электронных цифровых устройствах сводится к управляемому транспорту энергетических масок через электронные схемы с целью получения результата их энергетического сложения, который реализуется за счет источника энергии, имеющегося в устройстве и воспринимается как число за счет использования соответствующей системы счисления».
В п. 1.2.5 было показано, что обработка информации в мозгу человека происходит аналогично в виде транспорта энергетических масок по биологическим схемам энергетического суммирования.
Описанные электронные вычислительные устройства с точки зрения принятой в п.1.2.1 классификации можно отнести к искусственной составляющей машинной работопроизводящей системы обработки двух чисел. Применительно к работе по обработке информации уровня «инженерная задача» человек с калькулятором работает как машинная информационно-обрабатывающая система, так как образ работы (алгоритм решения задачи) формируется в М1 человека параллельно с ее выполнением, а управляющая программа в виде последовательности операций отрабатывается из его М2 , через М3 (пальцы рук человека) и промежуточную систему ΔМ3 (которой, в частности, является клавиатура ввода исходных данных и электронная схема калькулятора). В рамках каждого шага выполнения операции счета перемещение (транспорт) электрических импульсов осуществляется с помощью источника электроэнергии, имеющегося в устройстве (ΔМ0). При этом для обеспечения процесса управления и обратной связи в вычислительном устройстве в качестве обязательной составляющей имеется система отображения результатов энергетического сложения, выполненного в устройстве.
В варианте с дверьми человек воспринимал результат вычислительной операции, видя своими глазами конечную комбинацию дверей. Аналогично можно было бы поступить и в случае с электронным устройством. Для этого достаточно было бы реализовать световую индикацию состояния триггеров сумматора (лампочка горит – энергетическое состояние триггера – «1», лампочка не горит – состояние триггера – «0»). Однако на практике для визуализации итога выполненной операции используются дополнительные электронные схемы, которые сформировавшуюся комбинацию триггеров высвечивают в виде более понятном и не требующем дешифровки с помощью двоично-десятичной логики – изображения десятичных цифр. Принцип реализации такой визуализации при этом аналогичен вводу с клавиатуры, только наоборот.
Для автоматической работопроизводящей системы решения инженерных задач, в соответствии с определением необходимо, чтобы проектирование алгоритма переработки информации и формирование исходных данных для решаемой задачи автомат осуществлял самостоятельно только на основе его контактов с окружающим миром. Подобные информационно-обрабатывающие автоматы в настоящее время разрабатываются в рамках создания систем искусственного интеллекта.
Направляя космический автомат на Марс ученые не могут знать всего с чем конкретно он встретится на планете. Поэтому автомат снабжается системой искусственного интеллекта, позволяющей ему проектировать свои действия и выполнять соответствующую работу по их реализации только на основе контактов с окружающей средой (информационным полем).
Что же касается современных электронных цифровых вычислительных машин, то они в соответствии с принятой классификацией являются частью автоматизированной информационно-обрабатывающей системы – ее искусственной составляющей. ЭВМ может выполнять работу по обработке информации только в контакте с человеком (оператором, пользователем и т.п.). Однако в отличие от вычислительных устройств они в состоянии получать образ работы не в виде описания шагового действия, а целиком, в форме, так называемой, вычислительной программы. После получения описания содержания работы от человека ЭВМ выполняет огромные комплексы вычислительных операций в процессе решения конкретной задачи без его участия и на основе использования собственного источника энергии. Происходит это за счет специального конструктивного устройства, реализованного во всех программируемых вычислительных устройствах.
О
академик
В.М. Глушков и ЭВМ «Днепр»
2.2.5 |
Принцип работы электронных цифровых программируемых вычислительных устройств (электронных вычислительных машин – ЭВМ) |
Решение любой инженерной задачи чаще всего можно представить в виде некоторого множества элементарных вычислительных процедур. Если их последовательность постоянна, то автоматизацию вычислительного процесса можно осуществить, собрав некую электронную схему, последовательно соединив в ней все необходимые схемы по реализации унитарных операций. Однако она будет способна выполнять вычисления только в рамках одного и того же алгоритма (скажем, решать одно и то же уравнение при различных аргументах).
На практике потребность решения вычислительных задач с постоянным алгоритмом встречается только в специальных областях научной деятельности (например, астрономии) и решается чаще всего с помощью аналоговых вычислительных машин.
Для того, чтобы вычислительное устройство могло выполнять проведение вычислений по различным алгоритмам, необходимо иметь возможность всю последовательность шаговых действий по решению задачи и исходные данные вводить в устройство также, как числа в калькулятор. Следовательно, оно должно иметь в своей конструкции не два регистра, а гораздо большее количество элементов для запоминания информации.
Как и в случае с электронным калькулятором принцип работы программируемых вычислительных машин проще рассмотреть на некотором условном варианте их конструктивного исполнения.
Пусть данная условная машина ориентирована на выполнение всего четырех арифметических действий, причем с двухзначными целыми числами. В отличие от калькулятора в такую машину будет входить новая составляющая – память, состоящая (в нашем случае) из 99 структурных единиц – ячеек, каждая из которых имеет свой двухзначный номер и способна запоминать (формировать необходимую энергетическую настройку триггеров) числовую строку из 8 десятичных цифр. Для записи десятичного числа в ячейке памяти машины используется принцип формирования его двоично-десятичного энергетического кода с помощью четырех триггеров, а для всей строки 32. Например, числовая строка 13245679 соответствует следующему энергетическому состоянию триггеров ячейки памяти:
0001 0011 0010 0100 0101 0110 0111 1001
1 3 2 4 5 6 7 9
Для выполнения операций энергетического сложения, в соответствии с логикой арифметических операций сложения, вычитания, умножения и деления десятичных чисел, в конструкции машины имеются соответствующие электронные схемы, каждая из которых имеет свой двухзначный код (01 – сложение, 02 – вычитание, 03 – умножение, 04 – деление). Схемы выполнения арифметических операций объединены в один электронный блок, который называется арифметическим.
Помимо памяти и арифметического блока в вычислительное устройство входит дополнительный элемент – устройство управления. Оно способно анализировать содержание числовой строки ячеек памяти и пересылать (транспортировать) в случае необходимости их содержимое как в любую схему энергетического сложения арифметического блока, так и в любую заданную ячейку памяти.
Логику транспорта можно проиллюстрировать на принципе работы так называемых регистров сдвига, применяемых в конструкции реальных ЭВМ.
Они представляют собой последовательно соединенные ячейки памяти ( в нашем случае триггеры) с двумя возможными состояниями (рис. 2.2.11).
29.2.1.1 Рис. 2.2.11 Регистр сдвига
Информация, предназначенная для запоминания в таком регистре сдвига, подается на вход первой ячейки в двоичной форме («нуль» – нет сигнала в такте, или «единица» – есть сигнал), и первый знак этой последовательности «нулей» и «единиц» записывается в первую ячейку регистра. Затем эта информация передается во вторую ячейку, а в освободившуюся при этом первую ячейку записывается очередной элемент последовательности двоичных знаков. Таким образом, в результате ряда «шагов» вся последовательность, поступающая на вход первой ячейки, будет записана в регистре, если он имеет соответствующее количество ячеек (элементов) памяти.
В отличие от калькулятора при выполнении единичной арифметической операции (Sn) необходимые аргументы вводятся не в регистры соответствующей схемы энергетического сложения, а сначала в ячейки памяти с заданными номерами (Аi и Аj). После чего шаговое действие реализуется устройством управления в соответствии со следующей логикой:
«взять первый аргумент R1 в ячейке памяти с адресом Аi и переслать его в схему энергетического сложения с кодом Sn (устройство управления фактически должно перекачать по проводам энергетическое состояние ячейки с адресом Аi в регистр 1 схемы энергетического сложения, имеющей код Sn – выполнить транспорт электрических импульсов), затем второй аргумент R2 из ячейки c адресом Аj и отправить его в схему энергетического сложения с кодом Sn (выполнить транспорт энергетической маски ячейки с адресом Аj в регистр 2 схемы Sn), после чего полученный результат энергетического сложения, запомнить в ячейке памяти по адресу Аk (результирующую энергетическую маску в схеме Sn перегнать в ячейку с номером Аk).
Описанная логика шагового действия также водиться в память машины. Для этого необходимый путь транспорта: «где взять аргументы, в какую схему их направить и куда перенести результат» представляется в виде числовой строки – машинной команды. В машинной команде первые два числа – это номер (код) схемы энергетического сложения, следующие два – номер ячейки памяти, где записано значение первого аргумента, затем два числа задающие номер ячейки, где хранится значение второго аргумента и последняя двойка чисел – это адрес ячейки памяти, куда будет записан результат.
В частности, числовая строка вида
03 55 53 51,
будет описывать следующее содержание работы для устройства управления: «взять первый аргумент из ячейки с адресом 55 и переслать его в регистр 1 схемы с кодом 03, затем взять второй аргумент из ячейки с адресом 53 и переслать его во второй регистр схемы 03, после чего результат энергетического сложения из схемы 03 переслать в ячейку с номером 51».
Если необходимо выполнить не одну арифметическую операцию, а некоторое их множество, то их описание представляется в виде последовательности из машинных команд – вычислительной программы в машинном коде. При этом, для того, что бы устройство управления могло знать какую ячейку рассматривать как исходные данные для обработки – число, а какую как машинную команду, для записи вычислительной программы и исходных данных память машины делится на две фиксированные зоны. При подготовке программы программистом задается условие для устройства управления, что в ячейках с адресами от Аi до Аj могут быть записаны только машинные команды, а в ячейки c адресами от Аj+1 до Ак – исходные данные и промежуточные значения результатов выполнения шаговых действий.
В начале выполнения вычислительной программы адрес первой машинной команды вводится в устройство управления, после чего оно начинает циклически выполнять работу по одной и той же логике транспорта, только по разным маршрутам, заданным в каждой машинной команде. Отработав команду с номером i , оно перейдет на анализ и отработку содержания команды c номером i + 1 . При этом для запоминания номера последней команды арифметическое устройство использует дополнительную ячейку памяти – счетчик команд, первоначальное содержание которой всегда единица, и, которое увеличивается на единицу после завершения каждого шага.
Описанная условная вычислительная машина позволяет реализовывать любую последовательность арифметических операций, представленную в памяти машины в виде машинных команд без участия человека.
В частности, пусть необходимо вычислить результат следующего выражения:
-
Х =
(55 + 65) х 5
(55 + 65) х 5 – 20
Для вычисления значения Х потребуется выполнение следующей последовательности арифметических действий:
55 + 65 = Р1;
Р1 х 5 = Р2;
Р2 – 20 = Р3;
Р2 : Р3 = Р4 (или Р3, поскольку хранящийся там результат после выполнения деления уже не нужен).
Реализация данного алгоритма в автоматическом режиме потребует введения в память нашей условной вычислительной машины следующих исходных данных и вычислительной программы:
Содержание ячеек памяти с №№ 1 – 49, предназначенных для записи вычислительной программы |
Содержание ячеек памяти №№50–99, предназначенных для записи исходных данных и запоминания промежуточных результатов |
1) 01 50 51 54 |
50) 55 – константа |
2) 03 54 52 55 |
51) 65 – константа |
3) 02 54 53 56 |
52) 5 – константа |
4) 04 55 56 57 |
53) 20 – константа |
далее до 49 «нули» |
54) 0 – 1-й промеж. результат Р1 |
|
55) 0 – 2-й промеж. результат Р2 |
|
56) 0 – 3-й промеж. Результат Р3 |
|
57) 0 – конечный результат |
|
далее до 99 ячейки – «нули» |
После чего указать устройству управления, что первая машинная команда находится в ячейке памяти с номером 1.
Машина, прочитав содержимое 1-й ячейки, возьмет из ячейки №50 число 55, из ячейки №51 – число 65, отправит их в схему энергетического сложения с кодом 01 в арифметическом блоке, после чего полученный в схеме сложения результат перешлет в ячейку памяти с номером 54.
Как только данная работа будет выполнена, счетчик команд автоматически увеличится на «единицу» и устройство управления для нового цикла будет анализировать содержание ячейки памяти №2.
Выполнив все действия, машина окончательный результат запишет в ячейке с номером 57. Однако для того, чтобы его мог увидеть человек, она должна его отобразить. В нашем случае для этого достаточно высветить индикацию состояния триггеров в ячейке с номером 57. Для полученного результата световая индикация (0–лампочка не горит; 1–лампочка горит) будет выглядеть следующим образом
0000 0000 0000 0000 0000 0000 0000 0101,
что в соответствии с логикой двоично-десятичной системы счисления соответствует десятичному числу 0 0 0 0 0 0 0 5.
Сравнивая описанное программируемое вычислительное устройство с калькулятором с позиции классификации работопроизводящих систем можно определить человека с калькулятором как «работопроизводящую систему машинного счета», а человека с ЭВМ, как «работопроизводящую систему автоматизированного счета». В первом случае разработка алгоритма счета реализуется в М1 человека параллельно с процессом его пошаговой реализации; управление процессом счета выполняется им же через М3 (управляющей программой в данной случае служит система биоэлектрических импульсов для пальцев рук, которыми он нажимает на клавиши), но работа по транспорту электрических импульсов реализуется за счет энергии батареи калькулятора. Во втором, разработка алгоритма также выполняется человеком. Однако его отработка выполняется не параллельно с разработкой, а в любое последующее время автоматически (без участия человека) и сколько угодно раз. Управляющей программой реализации алгоритма решения задачи в данном случае является вычислительная программа для ЭВМ. Использование ЭВМ позволило разделить процесс решения задачи между теоретически любым количеством участников. Разработку алгоритма решения задачи может выполнять один человек – инженер, подготовку текста программы другой – программист, ввод программы в ЭВМ, организацию ее выполнения и получения результатов сможет выполнять третий – оператор ЭВМ. И при всем этом пользователем результатов решения задачи может быть не только разработчик алгоритма, но и любой другой специалист. Естественно, что для реализации разделенного процесса выполнения работы по обработке информации необходима система материальных носителей информации. Однако их содержание может быть более понятным после рассмотрения современных принципов создания программного обеспечения.
В рассмотренной условной вычислительной машине все было предельно упрощено как с точки зрения конструкции, так и методики составления вычислительной программы (машина способна запоминать и обрабатывать только целые числа, для каждого промежуточного результата используется своя ячейка памяти и т.п.). Для практических целей такая машина конечно не годится. Реальные вычислительные машины устроены гораздо сложнее. Однако принципы конструктивного построения и программного управления во многом аналогичны описанным и для дальнейшего рассмотрения боле подробное их изложение не имеет смысла.
2.2.6 |
Общая схема устройства ЭВМ. Классификация и виды современных ЭВМ |
Начиная с самых первых поколений, любая ЭВМ включала в себя: процессор, память (внутренняя и внешняя) и устройства ввода и вывода информации.
Процессор является главным устройством, в котором имеются все схемы энергетического сложения (арифметико-логическое устройство, по конструкции аналогичное арифметическому блоку в условной машине) и устройство управления.
Каждый процессор способен выполнять вполне определенный набор машинных команд. Состав машинных команд, определяется устройством конкретного процессора. Устройство управления само выбирает, какую машинную команду программы исполнять следующей. Однако в отличие от условной машины результат этого выбора часто может зависеть от обрабатываемой в данный момент информации (не подряд, а по любой логике).
Память, в целом, как и в условной машине, предназначена для совместного хранения данных и программ их обработки, но при этом делится на внутреннюю и внешнюю. Исторически возникновение такого деления было связано с необходимостью размещения ячеек памяти не только внутри, но и вне процессорного шкафа. Однако с уменьшением размеров машин смысл данного деления постепенно утратился. Тем не менее, терминология в ряде случаев используется до сих пор. Под памятью современного компьютера принято понимать быстродействующую электронную память, расположенную на его системной плате. Она изготавливается на основе современных полупроводниковых технологий (раньше использовались магнитные устройства на основе ферритовых сердечников [35]). Наиболее существенная часть внутренней памяти называется ОЗУ – оперативное запоминающее устройство. Его главное назначение состоит в том, чтобы хранить данные и программы для решаемых в текущий момент задач. При выключении питания содержимое ОЗУ полностью теряется. Информация, необходимая для первоначальной загрузки компьютера (программа начала работы) в момент включения питания, хранится в постоянном запоминающем устройстве (ПЗУ). Информация в ПЗУ не зависит от состояния компьютера (аналогично «врожденным» безусловным рефлексам у человека). Раньше содержимое ПЗУ раз и навсегда формировалось на заводе, теперь же современные технологии позволяют, в случае необходимости, обновлять его даже не извлекая из компьютера платы. Внешняя память реализуется в виде довольно разнообразных устройств хранения информации и обычно конструктивно оформляется в виде самостоятельных блоков (по сути, автоматизированных машин с ЧПУ). Сюда, прежде всего, следует отнести накопители на гибких и жестких магнитных дисках (последние иногда называют винчестерами), а также оптические дисководы (устройства для работы с CD ROM). В конструкции устройств внешней памяти имеются механические движущиеся части, поэтому скорость их работы существенно ниже, чем у электронной внутренней памяти. Тем не менее, внешняя память позволяет сохранять огромные объемы информации с целью последующего использования. Информация во внешней памяти предназначена для самого компьютера и поэтому хранится в удобной ему форме (человек без использования машины не в состоянии прочитать содержимое дискеты или диска CD ROM).
Для вывода информации о результатах обработки информации или решения задачи у любой ЭВМ имеются устройства вывода, которые позволяют представить ее в доступной человеческому восприятию форме. Для того, чтобы получить копию результатов на бумаге, используют печатающее устройство или принтер.
В качестве устройства ввода информации используется клавиатура и манипулятор мышь.
Для связи основных устройств компьютера между собой используется специальная информационная магистраль (связь по проводам), обычно называемая инженерами шиной. Шина обычно состоит из трех частей:
шина адреса, на которой устанавливается адрес требуемой ячейки памяти или устройства, с которым будет происходить обмен информацией;
шина данных, по которой собственно и будет передана необходимая информация; и, наконец,
шина управления, регулирующая этот процесс (например, один из сигналов на этой шине позволяет компьютеру различать между собой адреса памяти и устройств ввода/вывода).
Процесс чтения процессором ячейки памяти реализуется следующим образом. Определив, что шина адреса в данный момент свободна, процессор помещает на нее требуемый адрес и устанавливает необходимую служебную информацию (операция – чтение, устройство –ОЗУ и т.п.) на шину управления. Затем ожидает ответа от ОЗУ. Последнее, «увидев» на шине обращенный к нему запрос на чтение информации, извлекает содержимое необходимой ячейки и помещает его на шину данных.
Разумеется, что это только принцип работы, но для понимания сути технические нюансы рассматривать не имеет смысла. Для общего случая функциональную схему современного компьютера, можно представить в виде, приведенном на рисунке 2.2.12.
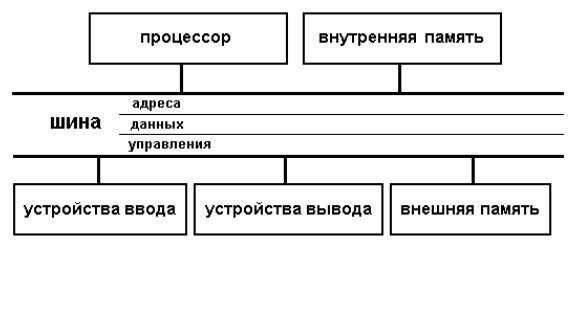
Рис.2.2.12. Обобщенная
схема электронной вычислительной
машины (ЭВМ)
В определенных случаях современные компьютеры могут иметь не один, а несколько согласованно работающих процессоров, прямые информационные каналы между отдельными устройствами, несколько взаимодействующих магистралей и т.д. Применяемая сегодня так называемая магистральная структура позволяет легко подсоединять к компьютеру только те внешние устройства, которые нужны для данного пользователя. Это дает возможность на основе использования стандартных блоков компоновать любую индивидуальную конфигурацию компьютера (увеличивать память, подключать различные устройства ввода/вывода и т.п.).
Представленное описание схемы устройства ЭВМ является достаточно общим. Реальные же конструктивные принципы создания современных ЭВМ более сложны и имеют давнюю историю развития.
На протяжении последних 80 лет было создано, сменяя друг друга, несколько поколений ЭВМ. Основные принципы развития вычислительной техники определяло совершенствование элементной базы и новые архитектурные решения.
Как уже говорилось ранее, первой элементной базой были электронные лампы и реле (1945–1954 г. г.). Оперативная память выполнялась на триггерах, позднее на ферритовых сердечниках. Надежность таких ЭВМ была невысокая, требовалась система охлаждения, а сами ЭВМ имели значительные габариты. Быстродействие составляло 5–30 тыс. арифметических операций / сек.
У второго поколения (1955–1964 г. г.) использовалась полупроводниковая элементная база, что позволило значительно повысить надежность и производительность, снизить габариты и потребляемую мощность. В рамках второго поколения проявилось разделение ЭВМ на малые, средние и большие. Существенно расширилась сфера применения ЭВМ, которые начали применять не только для инженерных и планово-экономических задач, но и строить на их основе системы управления производственными процессами.
Элементной базой третьего поколения (1965–1974 г. г.) стали интегральные схемы (ИС). Появились серии моделей ЭВМ, программно совместимых снизу вверх и обладающих возрастающими от модели к модели возможностями (в России это серия ЕС ЭВМ). Многие задачи управления памятью, устройствами ввода/вывода и другими ресурсами начали брать на себя, так называемые, операционные системы (ОС) или непосредственно аппаратная часть ЭВМ. Появились пакеты прикладных программ (ППП) различного назначения.
Основным отличием элементной базы ЭВМ четвертого поколения (1975–1984 г. г.) стало использование больших (БИС) и сверхбольших (СБИС) интегральных схем. ЭВМ проектировались ориентированно на эффективное использование программного обеспечения (например, UNIX- подобные ЭВМ, наилучшим образом работали в UNIX-среде, или Prolog- машины, ориентированные на задачи искусственного интеллекта). В ЭВМ четвертого поколения получило мощное развитие телекоммуникационная обработка информации за счет повышения качества каналов связи, использующих спутниковую связь. На их основе были созданы национальные и транснациональные информационно- вычислительные сети, которые позволили говорить о начале компьютеризации человеческого общества в целом. Именно на базе машин четвертого поколения мы сегодня получили доступ к сети «Internet». Новая элементная база позволила достичь больших успехов в миниатюризации, повышении надежности и производительности ЭВМ. Появились – микро и мини – ЭВМ, превосходящие по возможностям средние и большие ЭВМ предыдущего поколения при значительно меньшей стоимости. Технология производства процессоров на базе СБИС ускорила темпы выпуска ЭВМ и позволила внедрить компьютеры в широкие массы общества. С появление универсального процессора на одном кристалле (микропроцессор Intel-4004, 1971г.) началась эра персональных компьютеров – ПЭВМ. Миниатюрные процессоры позволили не только сделать компьютер более удобным, но и существенно увеличили скорость их работы (для выполнения операций энергетического сложения электрическим зарядам требовалось уже проходить гораздо меньший путь, чем ранее). К четвертому поколению относятся и супер-ЭВМ, характеризующиеся сверх высокой производительностью (среднее быстродействие 50 – 130 мегафлопсов. (1 мегафлопс = 1млн. операций в секунду с плавающей точкой). Сегодня супер-ЭВМ используются при решении задач математической физики, космологии и астрономии, моделировании сложных систем и др. Среди отечественных разработок супер-ЭВМ можно назвать машины серии «Эльбрус», вычислительные системы ПС-2000 и ПС-3000, содержащие до 64 процессоров, управляемых общим потоком команд. Быстродействие таких машин на ряде задач достигало порядка 200 мегафлопсов. В настоящее время ведутся работы по созданию ЭВМ пятого поколения. Согласно результатов работы японского Комитета научных исследований в области ЭВМ, впервые опубликованных еще в 1981г., вычислительные системы пятого поколения кроме высокой производительности и надежности при более низкой стоимости, должны:
обеспечить простоту применения ЭВМ путем реализации систем
ввода/вывода информации голосом; диалоговой обработки информации с использованием естественных языков; возможности обучаемости, ассоциативных построений и логических выводов;
упростить процесс создания программных средств путем
автоматизации синтеза программ по спецификациями исходных требований на естественных языках;
улучшить основные характеристики и эксплуатационные качества
ВТ для удовлетворения различных социальных задач, улучшить соотношения затрат и результатов, быстродействия, легкости, компактности ЭВМ;
обеспечить разнообразие ЭВМ, высокую адаптируемость к приложениям и надежность в эксплуатации.
Естественно, что не все ЭВМ используются для автоматизации инженерной подготовки судостроительного производства. Наибольшее применение сегодня находят персональные компьютеры – ПЭВМ (ЭВМ четвертого поколения). Успеху их внедрения в производство послужили не только их относительная простота и компактность, но и наличие для них развитого прикладного программного обеспечения (комплексов готовых вычислительных программ для решения самых различных задач). Это позволяет пользователям не разрабатывать для каждой задачи необходимые вычислительные программы самостоятельно, а покупать их у специализированных разработчиков как товарную продукцию. Формирование рынка разнообразного прикладного программного обеспечения стало следствием бурного развития технологии программирования, основные этапы которого будут рассмотрены далее.
2.2.7 |
Принципы разработки программного обеспечения для ЭВМ. Этапы совершенствования разработки программных продуктов |
Любая современная вычислительная машина (не зависимо от сложности устройства) работает только на уровне исполнения исключительно машинных команд (обрабатывает энергетические маски). Однако способы разработки и формирования в памяти вычислительных
программ постоянно совершенствуются и рассматривать их подробно не имеет смысла.
Метод программирования в машинных кодах применялся на самых ранних стадиях использования ЭВМ. Основным неудобством данного способа разработки программ являлась необходимость предварительного размещения в памяти полей для записи машинных команд и исходных данных с рабочими областями. Поэтому при разработке такой программы программисту приходилось вручную составлять таблицы соответствия, в которых сопоставлялись каждая изменяющаяся величина и адрес памяти, по которому хранилось значение этой величины.
С начала эта работа была частично «автоматизирована» путем разработки специальной программы – компилятора. Компилятор при написании программ позволил использовать программисту не реальные номера ячеек памяти, а их символические (условные) номера – метки. Вычисление реальных адресов, по которым размещались эти данные после ввода программы в память ЭВМ (построение таблиц соответствия – компиляция), производилось компилятором автоматически. Аналогичные метки стали использовать не только для данных, но и для условных и безусловных переходов: в качестве операнда некоторой команды. Чтобы данные и откомпилированная программа могли быть доступны процессору для выполнения, они должны располагаться в оперативной памяти. Но при выключении компьютера все данные из этой памяти пропадают. Поэтому программы и данные стали записывать на внешние носители информации – магнитные ленты и диски. Принцип написания программ с использованием символических номеров ячеек получил название программирование на языке Ассемблер или Языке Символического Кодирования (ЯСК).
Хотя программировать на Ассемблере было значительно проще, чем в машинных кодах, этот процесс все равно был очень медленным и трудоемким. Строка кода на Ассемблере по-прежнему соответствовала одной машинной команде. В то же время формирующийся опыт программирования показал, что в ходе составления программ значительная доля работы уходит на создание стереотипных наборов команд повторяющихся из программы в программу. Часть таких действий (особенно по обеспечению ввода-вывода данных в память и чтения из нее, запуск программы и т.п.) была выделена в самостоятельную составляющую программного обеспечения, получившую название операционная система. Это позволило при разработке программы не кодировать стандартные действия (читать исходные данные, ввести в память вычислительную программу и т.п.), а описывать их как функции (команды) операционной системы, Однако язык ассемблера для каждого конкретного типа машины часто зависел от ее архитектуры и поэтому мог иметь значительные различия (у каждой ЭВМ отличались коды электронных схем – первые два числа в машинной команде). Поэтому программу, написанную для одного типа машины, нельзя было откомпилировать для другой. Для каждой ЭВМ ее приходилось переписывать, а программисту изучать новый тип машины и новый язык ассемблера. Все это побудило к попыткам создания «универсального» языка программирования.
Поскольку любая написанная на ассемблере программа перед запуском компилировалась, был создан единообразный синтаксис (правила написания) команд, которые соответствовали часто повторяющимся действиям с одинаковым алгоритмом, например вычисление квадратного корня, возведение в степень и т.п. Такие команды назывались операторами. Одним из первых таких языков, которые стали называть (в отличие от ассемблера) «языками высокого уровня», стал ФОРТРАН (от англ. FORmula TRANslation). Данный язык предназначался для быстрого создания программ решения задач, в основе алгоритмов которых лежали математические формулы. Программист записывал текст программы в форме близкой к математическим уравнениям и в таком виде вводил его в память ЭВМ. После чего специальная программа – транслятор (от англ. translate) – переводила его на язык ассемблера и в виде полученного перечня машинных команд в относительных адресах запоминала в памяти. При выполнении программы пользователь с помощью специальных команд управления операционной системы вызывал из внешней памяти в оперативную память асемблеровский текст программы и вводил исходные данные, после чего ЭВМ самостоятельно выполняла компиляцию текста программы (переводила в реальные адреса памяти) и осуществляла решение задачи.
Например, текст программы решения уравнения
у=х2 + 0,75х–2,74
на языке Фортран будет иметь вид:
у = Х**2 + 0.75*Х – 2.74 (очень похоже на математическую запись), но после трансляции превратится в длинную последовательность из машинных команд (шаговых действий) в относительных адресах – асемблеровский текст. В процессе решения после загрузки операционной системой данного текста в оперативную (внутреннею) память ЭВМ сначала производится ее компиляция – привязка к действительным свободным адресам оперативной памяти, после чего, если с помощью операционной системы ввести исходные данные, она разместит их по реальным адресам, передаст их откомпилированной программе, и она будет выполнена.
В рамках совершенствования технологии программирования на ФОРТРАНе появилось новое структурное образование – процедура – группа операторов, объединенных в один блок, имеющий имя, по которому к ней было можно обращаться при написании текста программы. Откомпилированный текст процедуры при этом хранился во внешней памяти и вставлялся в подготовленную программу в процессе компиляции.
Опыт применения ФОРТРАНа показал очевидную эффективность использования языков высокого уровня. Однако каждая предметная область имеет свою специфику. Так, например, при решении экономических задач в основе алгоритмов часто используется обработка таблиц и списочных массивов. Поэтому со временем стали разрабатываться языки программирования для различных областей решаемых задач: экономических расчетов, обработки статистической информации, работы с геометрическими объектами и т.п. В результате появились другие языки высокого уровня: Алгол, Кобол, Бейсик, ПЛ/1 и др. У каждого из них был свой набор слов-операторов и свой транслятор, ориентированные на комплекс операций, специфичных для своей проблемной области. Основным преимуществом языков высокого уровня было то, что все они скрывают излишние для существа логики выполняющейся программы (ее алгоритма) детали, позволяя сосредоточиваться программистам на более крупных смысловых единицах с помощью имеющихся операторов языка. Отсюда пошло другое название языков высокого уровня – алгоритмические языки. Первым языком программирования, в котором для названия был использован данный признак классификации, стал Алгол (ALGOL – ALGOrithmic Language). Co временем в составе алгоритмических языков сформировались три уровня команд (операторов): линейные операторы, операторы перехода и операторы цикла. Линейный оператор, отработав, передавал управление следующему за ним оператору (увеличивал счетчик команд на единицу). Операторы перехода (условного и безусловного) обеспечивали ветвления программы. Они явным образом указывали, куда должно быть передано управление после очередного оператора (могли менять значение счетчика команд на любое заданное число). Операторы цикла описывали выполнение повторяющихся (в зависимости от какого-либо условия) групп других операторов. Появилось и новое структурное образование - процедура – группа операторов, объединенная в один блок, имеющий имя. Для включения данной группы операторов в программу достаточно было в исходном тексте на алгоритмическом языке, просто указать блок по имени процедуры. Далее при трансляции необходимые асемблеровские команда вставлялись в общую программу автоматически из внешней памяти. Со временем развились и способы представления данных в памяти ЭВМ. Были введены понятия константы и переменной. Под константой стали понимать значение числа, известное на момент компиляции. В процессе трансляции компилятор просто подставлял вместо имени константы ее значение. Переменная же - представлялась как некоторая область памяти, которую компилятор резервировал для будущего использования, а в машинных кодах вместо непосредственного значения использовал адрес, по которому это значение можно найти.
Появление языков высокого уровня привело к разделению программистов на две категории: системных и прикладных. Особенностью системных программистов стало то, что для разработки программ управления вычислительным процессом и трансляцией было необходимо досконально знать архитектуру компьютера и его возможности. У системных программистов появился свой алгоритмический язык – «С», написанный «программистами для программистов». Он позволял описывать алгоритмы работы ЭВМ на уровне одной ячейки.
У прикладных программистов развитие языков пошло по пути снижения трудоемкости поиска ошибок в программах и возможности простого прочтения их содержания. Стали развиваться понятия о «хорошем» и «плохом» стиле программирования и требование писать структурированные программы, которые бы легко читались и были понятны. В результате возникло структурное программирование. Появляются специальные методы, такие как метод Ашкрофта-Манна для переделки неструктурных алгоритмов в структурные [35]. Группы операторов, выполняющих единое смысловое действие, объединяются в процедурах. Программирование в значительной степени становится процедурным. Однако главным в развитии технологии разработки прикладного программного обеспечения стало окончательное превращение ее в разделенный процесс. Разработкой алгоритмов решения прикладных задач стали заниматься квалифицированные проблемные специалисты, наилучшим образом знающие все нюансы решения поставленной задачи и владеющие принципами создания программного обеспечения. Результатом их работы становились не тексты программ на алгоритмических языках, так называемые блок-схемы. Они представляли собой описание последовательности логики выполнения шаговых действий при решении задачи, только не на уровне машинных команд, а на более укрупненном (например, процедурном). Для оформления блок-схем были созданы специализированные графические языки и необходимые ГОСТы [42].
З
блок-схема
алгоритма задачи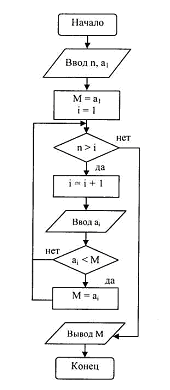
п/п |
Символ |
Наименование |
Содержание |
1 |
|
Блок вычислений |
Вычислительные действия или последовательность действий |
2 |
|
Логический блок |
Выбор направления выполнения алгоритма в зависимости от некоторого условия |
3 |
|
Блоки ввода-вывода данных |
1. Общие обозначения ввода (вывода) данных(вне зависимости от физического носителя) 2. Вывод данных, носителем которых является документ |
4 |
|
Начало (конец) |
Начала или конец алгоритма, вход или выход в программу |
5 |
|
Процесс пользователя (подпрограмма) |
Вычисление по стандартной программе или подпрограмме |
6 |
|
Блок модификации |
Функция выполняет действия, изменяющие пункты (например, заголовок цикла) алгоритма |
7 |
|
Соединитель |
Указание связи прерванными линиями между потоками информации в пределах одного листа |
8 |
|
Межстраничные соединения |
Указание связи между информацией на разных листах |
На основании блок-схем профессиональные программисты готовили тексты программ на алгоритмических языках и выполняли их отладку (тестовые просчеты по различным вариантам исходных данных). Результатом их работы становилось программное обеспечение решения соответствующей прикладной задачи. Прикладное обеспечение превратилось в товарную продукцию, покупать и пользоваться которой получили возможность любые специалисты. Для ведения рынка нового вида товарной продукции возникали правила лицензирования программного обеспечения. Со временем создание программного обеспечения для решения инженерных задач превратилось в самостоятельную индустрию, в которой сегодня работают тысячи специалистов, а их потребителем продукции являются многие миллионы инженеров и ученых.
Технология создания программного обеспечения постоянно совершенствуется. Однако рассматривать этот процесс более глубоко не имеет смысла. Главным остается только то, что на каком бы языке не была написана программа, в памяти машины перед ее исполнением она все равно будет выглядеть на языке машинных команд, а перед выполнением откомпиллирована к реальному состоянию свободной памяти на конкретный момент времени. Во всех случаях ЭВМ осуществляет только операции над энергетическими масками, хранящимися в ячейках ее памяти, которым могут быть сопоставлены определенные числа. Обрабатывая энергетические маски, она производит операции их энергетического сложения и адресного транспорта. И хотя сегодня мы являемся постоянными свидетелями того, как с помощью ЭВМ решаются самые разнообразные (на первый взгляд не вычислительные) задачи, начиная от заказа билетов на транспорт и заканчивая проектированием сложнейших объектов производства, происходит это за счет того, что для любого объекта можно построить его математическую, компьютерную и числовую модель. Именно с их помощью решение любой задачи можно свести к обработке числовой информации.
2.2.8 |
Способы представления информационных объектов в числовом виде. Типы данных. Математические модели объектов и процессов |
Любая модель – это копия объекта (в некотором смысле «более удобная») для манипуляции в пространстве и во времени, чем сам объект. Объектами моделирования могут быть целые классы процессов или явлений, которые обладают сходными свойствами, или являются изоморфными. Если удается сформулировать «хорошую» математическую модель, то для ее исследования может быть применен весь арсенал математической науки, накопленный за тысячелетия. Многие ученые классики независимо друг от друга высказывали одну и ту же мысль: «...область знания становится наукой, когда она выражает свои законы в виде математических соотношений».
В исследовательской практике иногда математические модели принято делить на аналитические и геометрические. Построение аналитических моделей опирается на наш опыт пересчитывания предметов, на знании различных числовых операций. Конструирование геометрических моделей опирается на опыт наблюдения пространства и различных пространственных операций. Геометрические модели применяют в задачах проектирования и производства изделий. В то же время отрезок прямой линии может служить моделью как предмета, так и явления, или процесса, моделируя, например, действующую силу, транспортный поток и тому подобное. С помощью отрезка прямой можно моделировать характер движения объекта, изменение стоимости, давления, температуры газа и т. д. Однако при этом необходимо помнить, что геометрия предмета и геометрия явления или процесса – вещи разные. При моделировании явлений или процессов появляется необходимость применения какой-либо координатной системы, так как отображается не сам изучаемый объект, а характеризующие его параметры (координаты). При этом сама координатная система чаще всего является многомерной, потому что как только в простых случаях удается ограничиться учетом минимального количества (двух или трех) параметров явления или процесса.
Условно все математические модели сложных систем делятся на регрессионные, качественные и имитационные.
Регрессионные модели – это формулы, описывающие связь различных характеристик системы, не претендуя на физический или биологический смысл этих зависимостей. Помещая модель судна в аэродинамическую трубу и испытывая ее в различных воздушных потоках, мы решаем задачу взаимодействия системы с внешней средой. При этом в корпусе судна не обязательно должно находиться оборудование, тем более, люди. Какие из свойств объекта необходимо учесть, а какие можно опустить, степень подробности воспроизведения моделью объекта определяются теми вопросами, на которые хотят ответить с ее помощью. Любая математическая модель отражает обрабатываемый информационный объект только в том объеме, который необходим для получения заданного информационного результата. Абсолютных моделей не бывает.
Например, пусть необходимо с помощью ЭВМ проанализировать, как некоторый объект, будет падать с неподвижного вертолета. Из физики известно, что расстояние d, которое пролетит некоторый объект, падая в течение времени t, определяется выражением d=at2/2, где а – ускорение силы тяжести – 9,806 65 м/с2. Это уравнение является простой математической моделью падающего объекта. Учитывая, что ускорение а – величина постоянная и равна 9,81 м/с, можно подсчитать, сколько пролетит наш объект за 4 с падения: 4 * 4=16 и 16 * 9,81 * (1/2) = 78,48 м. Для решения задачи о положении падающего предмета в любой момент времени с помощью ЭВМ в нее необходимо ввести программу, реализующую математические операции обработки одной переменной (I) и одной постоянной (а) величин в соответствии с алгоритмом, соответствующим математической модели процесса (d=at2/2).
С помощью показанной выше модели падения мы можем получать характеристики высоты падения. Однако, если бы нам потребовалось определить глубину ямы, которая получится после падения объекта на землю, то необходимо было бы включить в модель падения и вес объекта.
Для построения регрессионной модели достаточно статистически достоверных наблюденных корреляций между переменными или параметрами системы. Коэффициенты в регрессионных моделях обычно определяются с помощью процедур идентификации параметров моделей по экспериментальным данным. При этом чаще всего минимизируется сумма квадратов отклонений теоретической кривой от экспериментальной для всех точек измерений.
Имитационное моделирование – это нечто промежуточное между искусством и наукой. Его появление целиком обязано бурному росту возможностей вычислительной техники. Суть имитационного моделирования заключается в исследовании сложной математической модели с помощью вычислительных экспериментов и обработки результатов этих экспериментов. При этом, как правило, создатели имитационной модели пытаются максимально использовать всю имеющуюся информацию об объекте моделирования как количественную, так и качественную. Основными задачами имитационного моделирования являются: проверка гипотез о взаимодействии отдельных элементов и подсистем; прогноз поведения при изменении внутренних характеристик и внешних условий; оптимизация управления.
Помимо математических моделей на практике применяется и термин «компьютерная модель». Данные модели содержат «знания» об объекте в памяти ЭВМ, сформулированные в виде математических формул, таблиц, графиков, баз данных и знаний. Они позволяют изучать с помощью ЭВМ поведение системы при изменении внутренних характеристик и внешних условий, проигрывать сценарии, решать задачу оптимизации. Однако каждая компьютерная реализация соответствует конкретным, заданным параметрам системы. Более просто понятие «компьютерная модель» можно определить как сумму ЭВМ и специального программного обеспечения, разработанного на основе математической модели. Вместе они позволяют имитировать поведение моделируемого объекта при различных условиях. Примером компьютерной модели могут служить некоторые варианты компьютерных игр, особенно «стрелялки».
Не менее важное значение для дальнейшего рассмотрения материала имеет и понимание смысла «числовая модель».
Понятие числовой модели формировалось с глубокой древности. Еще Аристотель писал: «Число есть сущность всех вещей, и организация вселенной в ее определениях представляет собой вообще гармоническую систему чисел и их отношений». Одной из высших ценностей пифагорейцы считали число 10, которое они называли «четверицей», в которой они видели, по выражению Эмпедокла, «вечно текущей природы ... корень источный». Четверица представлялась в виде суммы первых четырех натуральных чисел (10 = 1+2 + 3 + 4), которые несли особую идейную нагрузку в учении Пифагора. Единица или монада, по Пифагору, обозначала дух, и из нее проистекал весь видимый мир. Из единицы происходит двойка или диада (2 = 1 + 1), которая символизировала материальный атом. Принимая в себя единицу, диада превращалась в триаду (3=2 + 1), которая являлась символом живого мира. Живой мир плюс единица образует тетраду (4 = 3 + 1), которая символизировала целое, то есть видимое и невидимое. Так как четверица 10 = 1 + 2 + 3 + 4, то это означало, что она выражает собой "ВСЕ"' — модель вселенной.
В практике судостроения показательным является вариант взаимосвязи вариантов математической, графической и числовой моделей судна. Так, еще в 1760 г. шведский кораблестроитель Ф. Г. Чапман предложил использовать параболу для построения формы ватерлиний. Ее аналитическое представление имело вид
Y
= Ymax
 или
Y
= Ymax
или
Y
= Ymax
![]() ,
,
где Ymax – максимальная ордината грузовой ватерлинии;
LH – длина носового заострения;
Lk – длина кормового заострения.
Ф. Г, Чапман считал, что такая форма ватерлинии оптимальна с точки зрения сопротивления судна при движении в воде. Позже для моделирования оптимальной формы судна применялись и другие кривые второго и третьего порядков, так называемые прогрессики. Их использование в различных сочетаниях привело к созданию методов аналитического представления всей формы подводной части судна. В частности, в 1879 г. И. П. Алымов, в рамках разработанной им «струйной теории» определял форму подводной части судна в виде уравнения
Y
=
![]() f(z)
w(x),
f(z)
w(x),
где f(z) и w(x) – безразмерные выражения шпангоута наибольшего сечения и грузовой ватерлинии соответственно.
Данные математические зависимости послужили оcновой для дальнейшего изучения влияния формы корпуса на сопротивление воды путем математического моделирования. В частности, на основе результатов буксировочных испытаний эскадренных миноносцев в Тейлоровском опытовом бассейне (США) был разработан метод математического описания судовой поверхности, в котором в качестве исходных данных использовалось гораздо большее число параметров, в том числе:
коэффициент
продольной полноты –
![]() ;
;
отношение xc /L – абсциссы ЦВ;
площади бульба (w6) и транца (wmp), отнесенные к площади шпангоута наибольшего сечения;
относительная ширина транца и отношение длины судна к его ширине;
угол входа конструктивной ватерлинии;
отношение водоизмещения к кубу длины – D/L3;
и т. п.
Для гражданских судов специалистами Вагенингенского опытового бассейна (Нидерланды) был разработан метод математического описания судовой поверхности, в рамках которого она представлялась в виде трех составляющих: носовой и кормовой оконечностей и цилиндрической вставки. При этом для описания поверхности каждой из составляющих были выведены аналитические определения основных параметров ватерлиний (коэффициенты полноты, абсциссы ЦБ, углы заострения и радиусы закругления, длина цилиндрической вставки) в функции от осадки судна.
Созданный математический аппарат позволял оценивать как мореходные качества проектируемого судна, так и проектировать форму судна в соответствии с заданными требованиями к мореходности — выполнять математическое моделирование. Следовательно, он являлся его математической моделью. Однако независимо от результатов математического моделирования, окончательное представление формы судна на этапе постройки осуществлялось с помощью ее геометрической модели — плазовой разбивки, которая, в свою очередь, для передачи из конструкторского бюро на завод-строитель задавалась в виде таблиц плазовых ординат – по сути числовой модели (смотри подразд. 2.1.2). Форма каждой кривой линии из состава плазовой разбивки (ее геометрическая модель) задавалась координатами точек, через которые необходимо было уложить гибкую рейку при ее построении на плазе (ее числовой моделью). Далее будет рассмотрен вариант моделирования геометрических построений при определении формы деталей корпуса судна. В основе данного моделирования лежат математические модели прямой, окружности и плавной кривой. Однако при решении геометрических задач в памяти ЭВМ модели данных геометрических объектов хранятся не в виде уравнений, а в виде численных значений соответствующих коэффициентов уравнений – числовых моделей.
О моделях можно говорить бесконечно. Однако для понимания дальнейшего материала наиболее важно понять, что на основе математических моделей разрабатываются алгоритмы программного обеспечения работы с реальными объектами, а с помощью числовых моделей информация о конкретных объектах хранится в памяти ЭВМ.
ЭВМ во всех случаях выполняет работу с числовыми моделями объектов. Основой представления чисел (построения числовых моделей) в ЭВМ является двоичная система счисления. Поэтому, резюмируя все изложенное, можно сказать, что бы не делала ЭВМ, она всегда имеет дело только с обработкой «нуля» и «единицы». Однако все многообразие числовых моделей основано на понятии тип данных.
После того как фон Нейман в 1945 году предложил записывать программу в память компьютера, появился главный водораздел хранимого в памяти на код и данные. Это привело к тому, что данные стали текстовыми и двоичными (или бинарными); иначе символьными и числовыми.
Разделение данных на текстовые и двоичные обусловлено различной природой ввода и отображения данных. Текстовые данные вводятся с помощью клавиатуры. Их числовое представление выступает в этом случае меткой (если угодно, именем) некоторого свойства или набора свойств, например, графического образа буквы.
При псевдоаналоговом вводе таких "квантов" нет, но есть отдельные свойства, интенсивность которых замеряется. Поэтому к таким данным возможно применение операции сравнения (больше-меньше); они действительно являются числовыми значениями. Например, распространенная кодировка цвета в формате RGB: для каждой точки графического изображения на экране отводится по три байта, каждый из которых кодирует интенсивность соответственно красной, зеленой и синей составляющих цвета этой точки (а эти значения, в свою очередь, непосредственно влияют на интенсивность излучения соответствующих электронных пушек монитора).
Помимо этого «глобального» деления, внутри каждого из них существует еще огромное количество более мелких делений. Например, небольшие целые числа можно записывать в один байт, для обычных вычислений использовать два байта, а для точных – четыре. При этом, если мы знаем, что нам нужны только натуральные числа, мы можем записывать в байт значения от 0 до 255 (беззнаковые); а если нужно использовать и отрицательные числа, то старший бит становится указателем знака числа, а помещаемое в ячейку значение может быть от –128 до +127. Точно так же разные формы записи могут использоваться и для записи чисел с плавающей точкой; это же относится и к символическим данным – символы могут кодироваться и одним байтом, и двумя (как в кодировке Unicode), и тремя, и даже переменным числом байтов.
Таким образом, само по себе двоичное значение в памяти компьютера ничего не означает. Чтобы оно стало что-то означать, помимо самого значения должен присутствовать еще тип переменной – какой-либо минимальный микроконтекст. Тип задает размер хранящегося в памяти значения и определяет действия, которые можно с этим значением проделать.
2.3 |
Теоретические основы создания автоматизированных работопроизводяших систем выполнения физического труда |
Ранее уже отмечалось что ни одно технологическое оборудование, применяемое для автоматизации выполнения технологических операций при изготовлении объектов производства, не имеет прямого контакта с информационным полем. Во всех случаях он реализуется через человека. Тем не менее, отдельные составляющие автоматизированных работопроизводящих систем имеет смысл классифицировать именно относительно принципов автоматического преобразования информационного воздействия переданного человеком через статическую управляющую программу в энергетический выход. При описании практического устройства таких составляющих в качестве основного варианта их классификации в настоящее время в большинстве технических источников используется разделение всех известных систем на автоматические регулирующие устройства [1n], автоматические следящие системы [2n], автоматические измерительные устройства [3n] и т. п. Для описания теоретических аспектов функционирования каждой из подобных систем разработана масса технической литературы. Однако использовать ее для упрощенного изложения устройства и принципов работы автоматизированного оборудования, применяемого в производстве, практически не реально. В большинстве случаев автоматизированное технологическое оборудование – это всегда какая-то множественная работопроизводящая система, состоящая из подобных автоматических структурных составляющих, совместная работа которых обеспечивается за счет различных принципов автоматического управления. Поэтому для того чтобы просто описать принцип действия автоматического технологического оборудования без технических изысков в данной монографии использован искусственный прием представления любого автоматизированного оборудования в виде комбинации из трех видов «унитарных автоматов» преобразования информационного воздействия в энергетический выход. Предлагаемый метод использования «унитарных автоматов» является чисто авторским приемом и ранее никогда не использовался, хотя необходимо отметить, что применение термина «автомат» в данном случае не совсем корректно.
Дело
в том, что в
современной теоретической кибернетике
существует специальный
раздел
– «теория
автоматов». Он разрабатывался в начале
50-х годов под руководством В. М. Глушкова.
В данной научной дисциплине под термином
«автомат» понимаются математические
модели реально существующих (технических,
биологических и т.
п.)
или принципиально возможных устройств,
перерабатывающих дискретную
информацию дискретными временными
тактами.
При этом для
классификации теоретических автоматов
в качестве основных критериев чаще
всего используются объем памяти и
механизм случайного выбора. В таком
понимании термин «автомат» наиболее
подходит для описания конструкции
вычислительных машин и головного мозга
человека.
Однако
использовать его в
рамках данной монографии было бы слишком
сложно. Поэтому
далее термин «унитарный автомат» будет
употребляться как в
SАВ
В
S0 ; SАВ : ( А0 , А2 , А3 ),
где: S0 – оператор;
SАВ – автоматизированное оборудование.
Использование данной структурной схемы позволяет выполнять описание устройства и принципов работы любого автоматизированного технологического оборудования путем разбора того как А2 данного оборудования воспринимает статическую управляющую программу и в каком виде она генерирует динамическую программу для того чтобы ее могла воспринимать подсистема А3 с учетом возможности порождения сигналов обратной связи для А2.
Для простого описания основных видов взаимодействия А2 и А3 введем три вида автоматизированных систем преобразования информационного воздействия в энергетический выход – «унитарных автоматов». В основу определения класса «унитарного автомата» будет положен вид воспринимаемой информации (энергетического воздействия в форме статической управляющей программы) подсистемой А2 и принцип превращения информации в работу (энергетический выход) в подсистеме А3 – машина исполнительная, воспринимающая искусственную динамическую управляющую программу, сгенерированную в А2..
Все описанные в технической литературе автоматические следящие системы, регулирующие, измерительные, и т.п. являются элементами конструкции подсистемы А2, основная функция которой – генерация динамической управляющей программы. Поэтому далее мы как бы будем выше данного понятия, оставив подробности на более глубокое изучение.
.
2.3.1 |
Классификация «унитарных автоматов» выполнения физического труда |
1-й класс — «конечные автоматы» – Sак
Принцип их работы сводится к тому, что А2 автомата Sак может воспринимать на входе статическую управляющую программу только в виде однозначно обозначенной информации (единичный сигнал энергетического воздействия одного и того же вида и объема) и в случае ее получения выполнять работу постоянную как по содержанию, так и по объему. Информация может быть в виде аналоговой величины, или числовой.
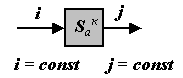 Пиктограмму
«конечного автомата» можно изобразить
следующим образом:
Пиктограмму
«конечного автомата» можно изобразить
следующим образом:
Ввод информации i определяет время начала выполнения работы. После ее считывания информационно-воспринимающей составляющей А2, в ней (А2) генерируется управляющий сигнал (воздействие) на начало работы подсистемы (А3), после чего дальнейшая последовательность действий автоматической работопроизводящей составляющей А3 (динамическая управляющая программа расхода энергии) определяется только ее конструкцией. Энергетическая основа управляющей машины (А2) и исполнительной (А3) при этом чаще всего общая.
Подобный принцип работы имеют большинство устройств выполнения технологических команд в автоматизированном оборудовании, а также различные реле и переключатели. Во всех случаях принцип их работы сводиться к следующему: на устройство приходит сигнал – информация в форме электрического, пневматического, электромагнитного, или любого другого вида энергетического воздействия, а результатом может быть любая постоянная последовательность действий устройства, выполняемая без участия человека, определенная его конструкцией, и, реализуемая за счет имеющегося у него источника энергии.
В качестве примера «конечного автомата» воспринимающего на входе аналоговую информацию, можно рассмотреть принцип работы электромагнитного токового реле (рис. 2.3.1).
Назначение данного устройства - выполнить переключение работы управляемого объекта 01 на объект 02 при скачкообразном изменении тока в сети с Iр на Icp (Iср > Iр).
Рис.2.3.1
Электромагнитное токовое
реле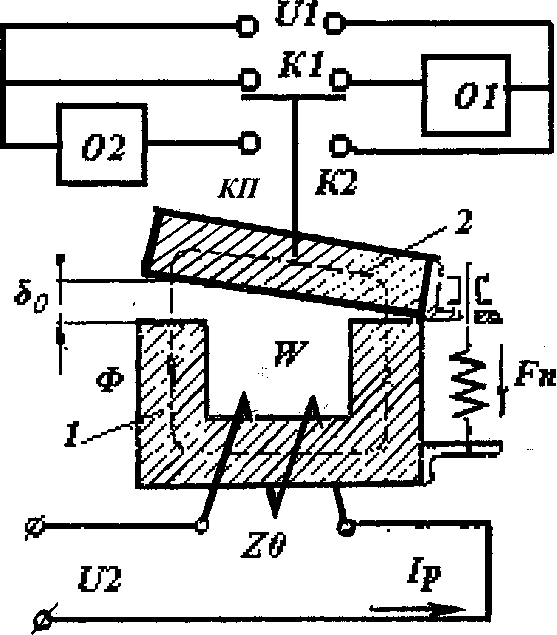
Подсистема А2 в данном автоматическом устройстве
конструктивно выполнена в виде катушки W, сопротивление которой Z0 , включено в цепь нагрузки последовательно с сопротивлением ZH (ZH > Z0). Протекающий по ней рабочий ток (Iр) создает магнитный поток Ф, замыкающийся через магнитопровод 1, якорь 2 и воздушный зазор δо. Для восприятия управляющей информации в составе А2 имеется возвратная пружина Fn, которая настроена таким образом, что как только в сети появится ток срабатывания (Icp), магнитный поток притянет якорь 2, приведя в движение контактный переключатель КП до касания с контактами К2. В результате КП разомкнет контакты К1 и замкнет контакты К2 (отключит управляемый объект 01 и включит объект 02 – выполнит постоянную по объему и содержанию работу j = const, затратив на механическое перемещение переключателя энергию из электросети). В данном устройстве Icp является статической управляющей программой для А2, а магнитный поток, сгенерированной в ней динамической управляющей программой для А3, в качестве которого выступают якорь 2, пружина Fn и контактный переключатель КП.
Классическим примером автомата, воспринимающего на входе числовую информацию является триггер. Он на входе получает дискретный импульс тока («1») и выполняет работу по его «опрокидыванию» (переходу в противоположное состояние), всегда одинаковую по смыслу и содержанию.
Целесообразность использования термина «конечный автомат» (данный термин имеет несколько другую трактовку в теории автоматов) для обозначения описанного варианта «унитарного автомата» связана с тем, что в рамках технического жаргона специалистами для составляющих автоматизированного оборудования, работающих по описанному принципу, часто используется термин «конечник».
2-й класс – аналоговые автоматы – S аА
В отличие от предыдущего класса данные автоматы способны воспринимать статическую управляющую программу, содержащую информацию о переменной по объему, но одинаковой по содержанию работе. Подсистема А2 данного класса автоматов SаА на входе воспринимает статическую УП в виде аналоговой информации и в зависимости от ее значения в каждый момент времени обеспечивает управляющее воздействие на подсистемы А3 и А0, которые будут выполнять работу, содержание которой определено конструкцией А3, а объем определяться введенной статической УП.
Суть аналоговой информации состоит в том, что энергетическое воздействие на информационно-воспринимающую систему будет непрерывным в заданном интервале времени, а его объем (значение) будет изменяться без скачков (в виде плавной непрерывной функции). Примером аналоговой информации может быть напряжение электрического тока, величина которого плавно меняется с помощью реостата.
П иктограмму
аналогового автомата можно представить
следующим образом:
иктограмму
аналогового автомата можно представить
следующим образом:
К
Рис.
2.3.2 Регулятор Дж. Уатта
Имеет смысл отметить, что если в технической литературе данный автомат описывается как регулирующее устройство, то в соответствии с принятой в монографии терминологией он является автоматизированной машиной выполнения работы по регулированию процессом. У него есть А2 – трапеция приема инерционного воздействия вращающихся грузов; А3 – система привода для вращения вала регулятора и передачи управляющего воздействия на механизм изменения положения заслонки и А0 – система генерации энергии вращения от паропровода.
Основной областью применения аналоговых автоматов и сегодня является реализация функции авторегуляции. В рамках конкретных конструктивных решений современные регулирующие автоматы базируются на использовании анализа самых различных физических явлений, создающих энергетическое (информационное) воздействие.
Любой физический процесс, протекающий в технологическом оборудовании, можно характеризовать значениями одного или нескольких параметров. Такими параметрами могут быть самые различные физические величины: подаваемое напряжение электрического тока; температура заготовки; скорость движения; давление газа и т. п. В качестве примера можно рассмотреть вариант автоматического поддержания постоянной высоты плазменного резака над поверхностью листа в машинах термической резки с ЧПУ (рис. 2.3.3).
Рис.
2.3.3 Регулятор высоты резака
на
МТР с ЧПУ – индуктивное кольцо
В случае использования в качестве управляющей информации напряжения плазменной дуги за номинальное принимается напряжение соответствующее требуемой по технологии резки высоте резака. Изменение высоты, вызванное неровностями листа, будет менять напряжение дуги в соответствии с непрерывной функциональной зависимостью. Это изменение и заложено в устройстве как входная аналоговая информация. Величина изменения напряжения связана конструктивно с лифтовой подачей резака, в основу которой заложена шарикововинтовая подача с шагом 5 мм. Как только напряжение начинает отклоняться от номинального (соответствующего заданной высоте резака) начинает генерироваться динамическая УП (разница напряжения, которая сравнивается с «нулем» и до тех пор, пока она не равна «нулю» происходит автоматическое включение двигателя лифтовой подачи, который работает на подъем, или опускание до тех пор, пока напряжение не станет равным номинальному). Направление перемещения обеспечивается с помощью «конечного автомата» изменения вращения двигателя лифтовой подачи, который производит переключение направление вращения по анализу знака величины разницы напряжения. Таким образом, изменение напряжение (аналоговая информация) превращается в переменную по объему работу лифтовой подачи, что позволяет плавно регулировать высоту положения плазменного резака с точностью 0,01 мм.
Сочетание объекта регулирования с автоматическим регулятором в классической литературе по теории автоматизации принято называть системой автоматического регулирования (САР). Принцип работы САР (точнее, каждого ее элемента — звена) обычно описывается в виде функциональной связи между входной и выходной величинами с помощью алгебраических, либо дифференциальных уравнений. Однако, как и в предыдущем примере в рамках принятой в монографии классификации данный вид регулятора является автоматизированной машиной выполнения регулирования, у которой А2 – устройство измерения напряжения дуги и определения разницы его значения от номинального; А3 – устройство лифтовой подачи резака, А0 – устройство использования энергии из электросети. Тем не менее, в отличие от предыдущего примера «аналогового автомата» в конструкции А3 данного уже используется и «конечный автомат» переключения направления вращения двигателя лифтовой подачи.
В целом, наука автоматического регулирования (создания аналоговых автоматов) сегодня бурно развивается. Однако для дальнейшего рассмотрения материала достаточно понимания лишь изложенного принципа их работы, который не меняется в зависимости от принципов технической реализации:
на автомат приходит информация в форме непрерывного,
изменяющегося энергетического воздействия, в результате чего выполняется работа (энергетический выход), объем которой функционально зависит от объема введенной информации, а содержание определяется конструктивным устройством автомата.
3-й класс – числовые автоматы – S аЧ
Данные структурные составляющие автоматизированных работопроизводящих систем способны воспринимать статическую УП в виде любого набора одинаковых единиц информации и в зависимости от их количества выполнять соответствующий объем одинаковых по содержанию и объему дискретных единиц работ.
Иначе говоря, в числовой автомат информация входит в виде счетного количества импульсов одинакового по виду и значению энергетического воздействия (например, счетного количества импульсов электрического тока одинаковых по напряжению и продолжительности воздействия), а объем работы (энергетического выхода из системы) будет определяться не видом и объемом энергетического воздействия в рамках каждого импульса, а только их количеством.

Примером
числовых автоматов являются шаговые
двигатели.
Генеральный принцип их работы сводится
к тому, что, получив один импульс
энергетического воздействия постоянной
величины (электрический, пневматический
и т. п.), двигатель выполняет постоянную
по величине дискретную единицу работы
(в частности, поворачивается ровно на
угол
![]() ).
Зная число
N импульсов,
поступивших в двигатель, можно
однозначно определить суммарный угол
поворота
(или число оборотов) его ротора. И
наоборот, если известно сколько оборотов
должен сделать шаговый двигатель, то
можно однозначно определить сколько
импульсов электрического тока необходимо
в него подать. То есть спроектировать
объем информационного воздействия до
начала работы. Таким образом, в
системе происходит превращение числа
(количества импульсов энергетического
воздействия) в нормированную работу
(угол поворота ротора),
что и послужило в дальнейшем основанием
названия данного принципа автоматической
работы как «числовое управление».
Такая система
управления впервые была предложена М.
Г. Брейдо,
).
Зная число
N импульсов,
поступивших в двигатель, можно
однозначно определить суммарный угол
поворота
(или число оборотов) его ротора. И
наоборот, если известно сколько оборотов
должен сделать шаговый двигатель, то
можно однозначно определить сколько
импульсов электрического тока необходимо
в него подать. То есть спроектировать
объем информационного воздействия до
начала работы. Таким образом, в
системе происходит превращение числа
(количества импульсов энергетического
воздействия) в нормированную работу
(угол поворота ротора),
что и послужило в дальнейшем основанием
названия данного принципа автоматической
работы как «числовое управление».
Такая система
управления впервые была предложена М.
Г. Брейдо,
А. Е. Кобринским и В. К. Бес-Страшновым.
О
Рис.2.3.4 Схема
устройства шагового
двигателя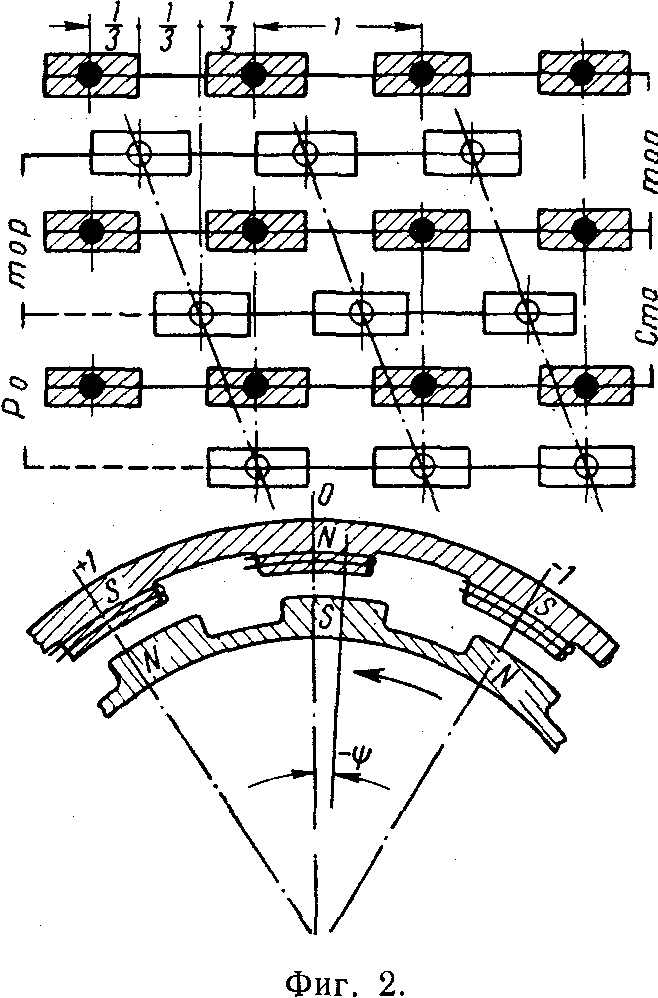
Применяемые в современном автоматизированном оборудовании с числовым программным управлением приводы намного сложнее по своему конструктивному устройству. Однако принцип их работы, независимо от технической реализации, остается тот же – превращение числа, выраженного через дискретное энергетическое воздействие, в нормированную работу.
Учитывая, что с помощью построения различных кинематических схем, любое плоское или объемное перемещение может быть построено на базе вращения, применение шагового двигателя позволяет нормировано управлять работой любых перемещающихся элементов автоматического оборудования.
В станках с ЧПУ применяют, главным образом, электрические и электрогидравлические приводы, использующие в качестве преобразующего устройства электромеханический преобразователь, либо шаговый двигатель. Электрические приводы выполняются на основе силовых шаговых двигателей либо двигателей постоянного тока. В качестве усилителей мощности могут применяться тиристорные и электромашинные усилители.
Подводя итог рассмотрению классификационных типов «унитарных автоматов», следует подчеркнуть, что именно комплексирование приведенных схем автоматического преобразования информации в работу лежит в основе конструктивного устройства всех основных средств автоматизации выполнения технологических процессов. Поэтому далее будут рассмотрены принципы автоматического управления совместной работой основных вариантов объединения «унитарных автоматов» в автоматизированном технологическом оборудовании.
2.3.2 |
Основные принципы управления совместной работой «унитарных автоматов» в автоматизированном технологическом оборудовании |
Для понимания принципов работы реального технологического оборудования, применяемого для автоматизации выполнения технологических процессов на судостроительных предприятиях, достаточно рассмотреть в качестве основных три принципиальные схемы автоматического управления совместной работой комплекса «унитарных автоматов» в составе одной единицы оборудования: цикловое управление, управление с помощью копира и числовое программное управление, выделив в них только самое главное.
2.3.2.1 |
Принцип циклового управления работой автоматизированного технологического оборудования |
Данный способ управления чаще всего используется для оборудования, реализующего постоянно повторяющийся технологический процесс, как по траектории перемещения технологического инструмента, так и по содержанию выполняемых технологических операций.
В варианте циклового управления статическая управляющая программа представляет собой команду – «пуск» на начало работы оборудования. В большинстве случаев управляющей информации об объеме и содержании работы на входе в систему А2 оборудования с цикловой системой управления не вводится. Дальнейшая динамическая программа работы оборудования генерируется схемным объединением структурных составляющих из конечных и аналоговых автоматов в определенную функциональным назначением оборудования технологическую цепочку.
Команду на начало выполнения работы во всех случаях получает первый конечный автомат (замкнутое техническое устройство) в технологической цепочке, который после получения управляющего сигнала выполняет работу в соответствии со своим конструктивным устройством, а закончив ее, передает управляющий сигнал на начало работы следующему в технологической цепочке конечному автомату, с которым он соединен каналом передачи управляющих сигналов и который в дальнейшем отрабатывает полученную команду аналогичным образом. В случае необходимости управления временем выполнения операции информацию о «выдержках» задают с помощью специальных потенциометров (аналоговых автоматов), которая в дальнейшем отрабатывается с помощью временных устройств (реле времени – аналоговых автоматов).
В результате последовательной отработки управляющего сигнала всеми устройствами, входящими в конструкцию оборудования, выполняется некоторая работа, которая может повторяться каждый раз при поступлении очередного управляющего сигнала на вход в систему.
В 70-е годы прошлого столетия цикловое управление широко применялось в машиностроении для токарного оборудования.
Достаточно широкую область применения данный принцип управления нашел при создании роботов. Цикловые системы управления роботами имеют разнообразные варианты построения. Однако подробно рассматривать их в рамках данной монографии нецелесообразно. Основной областью их применения является машиностроение с серийным производством продукции.
Описанный принцип работы автоматического оборудования больше всего подходит для автоматизации процессов типа: «взять заготовку, установить в рабочую зону технологического оборудования, выполнить определенную технологическую операцию (постоянную по содержанию и объему) и отправить заготовку в накопитель».
Н
Типовая
обрабатываемая деталь
Штамп
Захватывающее
устройство
Подающее
устройство
Электромагнитный
захват заготовок
Пресс
 а
рис. 2.3.5 показан автоматизированный
робото-технологический комплекс,
предназначенный для штамповки деталей
типа «скоба».
а
рис. 2.3.5 показан автоматизированный
робото-технологический комплекс,
предназначенный для штамповки деталей
типа «скоба».
Р
накопитель
Промышленный
робот

В состав данного комплекса входит промышленный робот, имеющий цикловую систему управления. Робот осуществляет отбор заготовки из подающего устройства, ее установку в рабочую зону пресса и загрузку готовой детали после гибки в накопитель.
Принципиальную схему работы данного автоматизированного комплекса упрощенно можно представить следующим образом:
Сигнал на начало работы приходит на конечный автомат К1, который, получив сигнал, включает привод «руки» робота, вращающий его против часовой стрелки;
В процессе вращения «рука» робота касается датчика – конечного автомата К2, находящегося в зоне накопителя заготовок (конструктивно конечный автомат К2 представляет собой механический упор, устанавливаемый в крайней точке задаваемой траектории движения). Датчик К2 выключает двигатель «руки» и включает автомат К3 – электромагнитное устройство захвата заготовки;
Как только электромагнитное устройство (автомат К3) зафиксирует заготовку, оно передаст сигнал автомату К3, который начнет поворачивать «руку» робота по часовой стрелке до касания с датчиком К5, находящимся в зоне выполнения операции штамповки;
Касание с датчиком К5 приведет к выключению привода вращения по часовой стрелке и передаст сигнал на электромагнитное устройство К3, которое по новому сигналу отпустит заготовку и та упадет в рабочую зону;
Попав в рабочую зону заготовка включит датчик К6, который передаст сигнал автомату К7 пресса на выполнение штамповки;
Автомат К7, выполнив операцию штамповки, пошлет сигнал электромагнитному устройству К3, которое захватит отштампованную деталь и передаст сигнал автомату К4 привода «руки» робота, который начнет вращать ее по часовой стрелке до контакта с конечным датчиком К8, находящимся в зоне накопителя готовых деталей;
Как только «рука» робота коснется конечного датчика К8, он отключит электромагнитное устройство и заготовка упадет в накопитель готовых деталей, а затем датчик передаст управляющий сигнал автомату К1 привода «руки» робота, который начнет вращать ее, до касания с датчиком К2, после чего система войдет в замкнутый цикл работы и будет повторять его до тех пор, пока не поступит команда «общего прерывания».
В соответствии с рассмотренными в п. 2.3.1 принципами классификации данный производственный комплекс является автоматизированной работопроизводящей системой, однако он не генерирует «образ работы» на основе введенной информации. «Образ работы» заложен в его конструкции. Его придумали создатели комплекса, которые в этом случае являются составляющей А1 в общем процессе превращения информации в работу. Подсистемой А2 в данном комплексе является оператор, который подает команду на начало работы и выполняет функцию восприятия обратной связи, и электрическая схема
связи конечных автоматов и приема команды на начало работы. Ну а роль А3 и А0 в этом случае выполняют механизмы, электродвигатели и электросеть.
Несмотря на то, что конструктивное исполнение оборудования с цикловой системой управления может быть достаточно сложным, принцип схемной реализации технологического процесса во всех случаях будет одинаковым – в качестве логической управляющей программы функционирования оборудования выступает физическая схема объединения входящих в систему конечных автоматов (переключателей).
В
Рис. 2.3.6 Пример
штекерной панели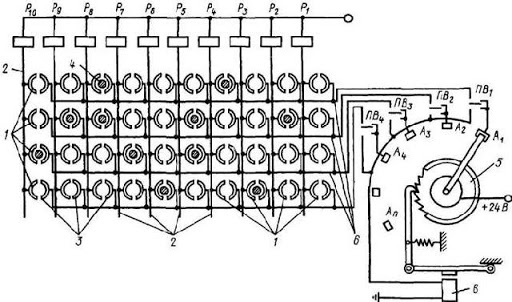
В современных вариантах оборудования, управляемого с использованием принципов циклового управления, применяются и электронные программируемые системы управления, в которых в качестве программоносителя используются многопозиционные плоские переключатели [2]. В некоторых литературных и технических источниках данный принцип управления определяется как «позиционное управление». С их помощью можно изменять (программировать) количество управляемых координат, точек позиционирования, число и вид технологических команд и т. п. Однако данный вариант использования термина «программируемое управление» не соответствует смыслу понятия программное управление, которое будет рассмотрено далее в
п.. 2.3.2.3. В описанном варианте программирование – это (как и в случае со штекерной панелью) просто изменение вида работы автоматизированной системы без конструктивного вмешательства путем изменения схемы передачи команд управления между структурными составляющими оборудования.
2.3.2.2 |
Управления работой технологического оборудования с помощью копира |
Принцип данного вида управления автоматическим оборудованием состоит в том, что информация о содержании работы (статистическая управляющая программа - прежде всего траектории перемещения рабочего инструмента) задается с помощью некоторого физического аналога (копира). С помощью копира информация вводится в работопроизводящую систему в виде непрерывного переменного по значению энергетического воздействия, то есть в форме аналогового сигнала.
Копировальные системы управления могут быть двух - и трехкоординатные. Чаще всего их применяют в токарных, фрезерных, шлифовальных и отделочных станках для массового производства деталей установившейся формы.
В механических копировальных системах станков копир выполняет функции задатчика перемещений и подачи режущего инструмента, воспринимая силы резания. Передача движения и усилия осуществляется посредством кинематической цепи станка. Механические копировальные системы современных станков обеспечивают максимальную скорость копирования 500... 1000 мм/мин. В станках для обработки легких сплавов скорость копирования не превышает 4 м/мин.
Для считывания данной информации в конструкции управляющей машины обычно имеется следящая головка, которая воспринимает информацию о траектории движения инструмента, заданную с помощью копира, в виде механического, электромагнитного, фотооптического (подумать) или какого-либо другого способа энергетического воздействия и на ее основе генерирует управляющее воздействие на исполнительный инструмент также в виде непрерывной физической величины (механического перемещения, силы тока и т. п.).
В качестве примера можно рассмотреть простейшую условную механическую систему управления движением технологического инструмента с помощью копира (рис. 2.3.7).



Фреза
Заготовка


