

1. Понятие автоматизированного электропривода. Его структурные схемы и характеристики.
Электроприводом называется электромеханическое устройство, предназначенное для приведения в движение рабочих органов машин и управления их технологическими процессами, состоящий из передаточного устройства, электродвигателя, преобразовательного и управляющего устройств.
Особенность АЭП состоит в том, что переработка информации, необходимая для управления потоками энергии, осуществляется автоматически. Благодаря применению АЭП человек освобождается не только от тяжелого физического труда, но с него снимаются также функции соответствующей переработки информации.
Структурная схема замкнутого автоматизированного ЭП представлена на рис.
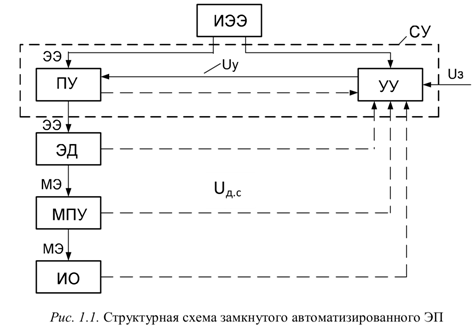
В схеме: ИЭЭ – источник электрической энергии; ЭЭ – электрическая энергия. Её параметры – напряжение (U), частота (f) и ток (I); МЭ – механическая энергия. Её параметры – угловая (ω) или линейная (V) скорость, полезные момент (М) или сила (F), полезная мощность (Рп); ПУ – преобразовательное устройство – силовой преобразователь, предназначенный для преобразования параметров электроэнергии ИЭЭ; ЭД – электродвигатель, предназначенный для преобразования параметров электроэнергии преобразователя в механическую энергию (и обратное преобразование); МПУ – механическое передаточное устройство, предназначенное для изменения скорости вращения или вида движения. В качестве МПУ в электроприводах может быть редуктор, ременная передача, винтовая и зубчато-реечная передача… ИО – исполнительный орган рабочей машины, предназначенный для совершения полезной работы. Сигнал управления Uу силовым преобразователем вырабатывается устройством управления (УУ), в состав которого в общем случае входят устройства получения, преобразования, хранения, распределения и выдачи информации, блоки сопряжения, регуляторы переменных (координат), различные функциональные блоки управления и т. д. Устройство управления и силовой преобразователь образуют систему управления (СУ) электропривода. Устройство управления вырабатывает сигнал управления Uу с помощью сигнала задания (уставки) U з, задающего характер движения исполнительного органа, и ряда дополнительных сигналов U д. с, дающих информацию о реализации технологического процесса рабочей машины, характере движения исполнительного органа, работе отдельных элементов ЭП и т. д. Сигнал задания Uз электропривод получает от внешней по отношению к нему системы более высокого уровня, например автоматизированной системы управления технологическим процессом (АСУ ТП), которая поставляет также электроприводу необходимую для его функционирования информацию. В зависимости от выполняемых функций, вида и количества регулируемых координат и степени автоматизации технологических процессов реализация ЭП может быть самой разнообразной.
В автоматизированном ЭП операции управления в соответствии с требованиями технологического процесса выполняются системой управления. На оператора возлагаются функции только по включению и отключению ЭП, наладке и контролю за его работой. Все автоматизированные ЭП делятся, в свою очередь, ещё на две группы: разомкнутые и замкнутые. Работа разомкнутого ЭП характеризуется тем, что все внешние возмущения отражаются на работе ЭП. Например, изменение момента сопротивления влияет на выходную координату ЭП – его скорость (разомкнутый ЭП не отстроен от влияния внешних возмущений). Разомкнутый ЭП по этой причине не обеспечивает высокого качества регулирования координат, хотя и отличается в то же время простой схемой. Замкнутый ЭП может быть реализован по принципу отклонения с использованием обратных связей или по принципу компенсации внешнего возмущения. Основным отличительным признаком замкнутых систем является полное или частичное устранение влияния внешнего возмущения на регулируемую координату ЭП. В силу этого обстоятельства замкнутый ЭП обеспечивает более качественное управление движением исполнительного органа рабочей машины, хотя его схемы оказываются более сложными.
Большинство замкнутых структур ЭП используют принцип отклонения (обратной связи). Он характеризуется наличием цепи обратной связи, соединяющей выход ЭП с его входом. Рис. 1.2. Схема ЭП с обратной связью по скорости
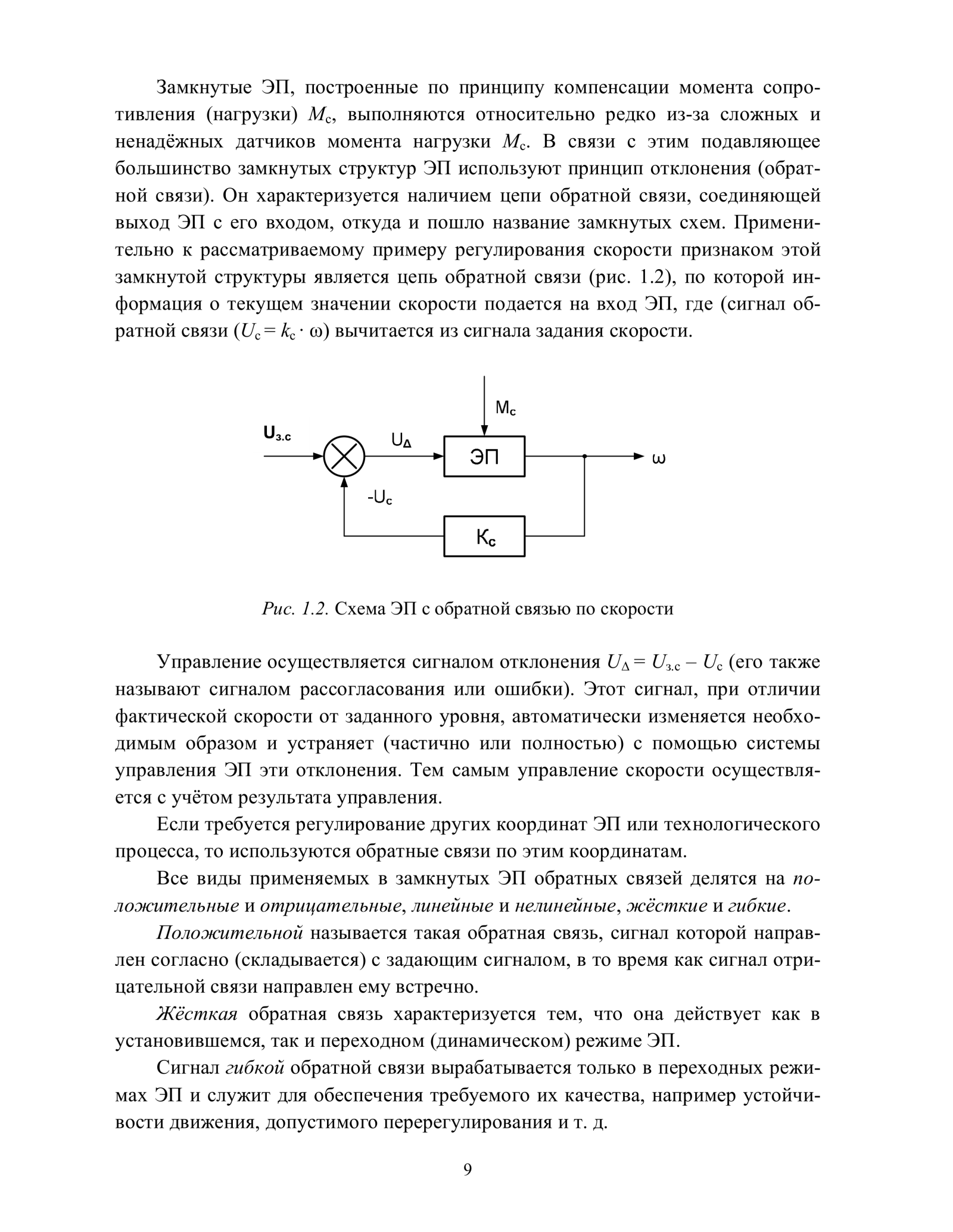
Управление осуществляется сигналом отклонения U ∆ = Uз.с – Uс. Все виды применяемых в замкнутых ЭП обратных связей делятся на положительные и отрицательные, линейные и нелинейные, жёсткие и гибкие. Положительной называется такая обратная связь, сигнал которой направлен согласно (складывается) с задающим сигналом, в то время как сигнал отрицательной связи направлен ему встречно. Жёсткая обратная связь характеризуется тем, что она действует как в установившемся, так и переходном (динамическом) режиме ЭП. Сигнал гибкой обратной связи вырабатывается только в переходных режимах ЭП и служит для обеспечения требуемого их качества, например устойчивости движения, допустимого перерегулирования и т. д.