

Схеми замкнених структур електропривода
Замкнені структури ЕП будуються за принципом компенсації зовнішніх збурювань і принципу відхилення, який називають також принципом зворотного зв'язку.
Принцип
компенсації розглянемо на прикладі
компенсації найбільш характерного
зовнішнього збурювання ЕП - моменту
навантаження Мс
при регулюванні його швидкості
![]() (мал. 11.1, а). Основною ознакою такої
замкненої структури ЕП є наявність
ланцюга, по якому на вхід ЕП разом із
сигналом, що задає, швидкості Uзс
подається сигнал, пропорційний моменту
навантаження: Uм=kмMс,
де kм
- коефіцієнт пропорційності. У результаті
керування ЕП здійснюється сумарним
сигналом UΔ,
який, автоматично змінюючись при
коливаннях моменту навантаження,
забезпечує підтримку швидкості ЕП на
заданому рівні.
(мал. 11.1, а). Основною ознакою такої
замкненої структури ЕП є наявність
ланцюга, по якому на вхід ЕП разом із
сигналом, що задає, швидкості Uзс
подається сигнал, пропорційний моменту
навантаження: Uм=kмMс,
де kм
- коефіцієнт пропорційності. У результаті
керування ЕП здійснюється сумарним
сигналом UΔ,
який, автоматично змінюючись при
коливаннях моменту навантаження,
забезпечує підтримку швидкості ЕП на
заданому рівні.
Незважаючи на ефективність, керування ЕП за схемою, наведеної на мал. 11.1, а, здійснюється рідко через відсутність простих і надійних датчиків моменту навантаження Мс ( впливу, що обурює). Тому в більшості замкнених схем використовується принцип відхилення (принцип зворотного зв'язку), який характеризується наявністю ланцюга зворотного зв'язку, що з'єднує вихід ЕП з його входом. У цьому випадку при регулюванні швидкості використовується ланцюг зворотного зв'язку (див. мал. 11.1,б), по якому інформація про поточне значення швидкості (сигнал зворотного зв'язку Uос=kос ) подається на вхід ЕП, де він віднімається із сигналу завдання швидкості. Керування здійснюється сигналом відхилення UΔ = Uзс - Uос (його також називають сигналом неузгодженості або помилки), який при відмінності швидкості від заданої відповідно автоматично змінюється й за допомогою системи керування ЕП усуває ці відхилення.
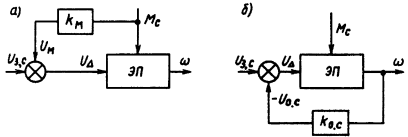
Рис. 11.1
При необхідності регулювання інших координат ЕП або робочої машини використовуються зворотні зв'язки по цих координатах.
Усі застосовувані в замкненому ЕП зворотні зв'язки діляться на позитивні й негативні, лінійні й нелінійні, жорсткий й гнучкі. Позитивним називається такий зворотний зв'язок, сигнал якого спрямований згідно ( тобто складається) із сигналом, що задається, сигнал же негативного зв'язку спрямований йому зустрічно («-» на мал. 11.1,б).
Жорсткий зворотний зв'язок діє як в перехідному режимі, так і в режимі, що встановився. Сигнал гнучкого зворотного зв'язку тільки в перехідних режимах ЕП і служить для забезпечення необхідної якості, наприклад стійкості руху, припустимого перерегулювання та ін.
Для лінійного зворотного зв'язку характерна пропорційна залежність між регульованою координатою й сигналом зворотному зв'язка Uос, при реалізації ж нелінійного зв'язку ця залежність нелинейна.
Залежно від виду регульованої координати в ЕП використовуються зв'язки по швидкості, положенню, струму, напрузі, магнітному потоку, ЭДС.
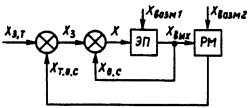
мал 11.2
Для забезпечення заданого темпу і якості технологічних процесів на ЕП крім зазначених «внутрішніх» зворотних зв'язків часто подаються сигнали різних технологічних датчиків, наприклад температури, натягу, зусилля різання, тиску, витрати та ін. У цьому випадку ЕП разом з робочою машиною або механізмом, що реалізують технологічний процес або операцію, утворюють систему автоматичного регулювання (мал. 11.2). У цій системі ЕП є силовим регулюючим пристроєм, вихідна координата якого Хвих. (наприклад, швидкість) є керуючим впливом для робочої машини РМ і забезпечує заданий хід технологічного процесу при змінах як його сигналу, Xзт так і збурюючого впливу Xзб. Сигналом завдання для ЕП у цьому випадку є сигнал відхилення (неузгодженості) між сигналом, що задає технологічний параметр Xзт і сигналом технологічного зворотного зв'язку Xтос. Відзначимо, що сигналів технологічних зворотних зв'язків може бути небагато, а для виробітку сигналу, що задає, для ЕП використовуються ЕОМ або мікропроцесори.
Як ми вже відзначали, для керування рухом виконавчого органа іноді потрібно регулювати кілька координат ЕП, наприклад струм (момент) і швидкість. У цьому випадку замкнені ЕП виконуються по одній з наступних структурних схем.
Схема ЕП із загальним підсилювачем (мал. 11.3). Прийняті на схемі позначення елементів відповідають загальній схемі ЕП на мал. 1.1, за винятком електродвигуна, представленого для зручності аналізу у вигляді двох частин - електричної ЭЧД і механічної МЧД.
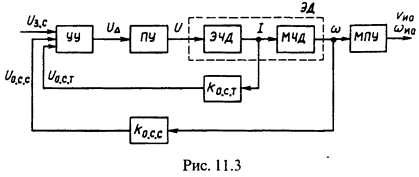
Схема забезпечує регулювання двох координат ЕП - швидкості й струму (моменту). У цій схемі сигнали зворотних зв'язків по струму Uост і швидкості Uосс подаються на вхід керуючого пристрою УУ разом із сигналом, що задає, швидкості Uзс, де алгебраїчно підсумуються. Схема відрізняється простотою реалізації, але не дозволяє регулювати координати ЕП незалежно друг від друга. За рахунок використання нелінійних зворотних зв'язків, називаних у теорії ЕП відсіченнями, вдається в деякому діапазоні здійснювати їхнє незалежне регулювання, що частково усуває зазначений недолік.
Схема з підлеглим регулюванням координат (мал. 11.4) принципово відрізняється від попередньої. У ній регулювання кожної координати здійснюється власними регуляторами (струму РТ, швидкості РС), які разом з відповідними зворотними зв'язками утворюють замкнені контури. Ці контури розташовуються таким чином, щоб вхідним (, що задають) сигналом для контуру струму Uзт був вихідний сигнал зовнішнього стосовно нього контуру швидкості. Таким чином, внутрішній контур струму буде підлеглий зовнішньому контуру швидкості - основній регульованій координаті ЕП.
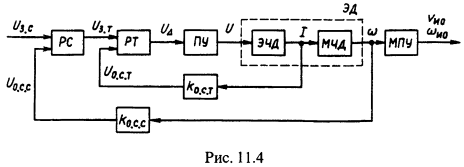
Основна гідність такої схеми полягає в можливості оптимального настроювання регулювання кожної координати, у силу чого вона знайшла широке застосування в ЕП. Крім того, підпорядкування контуру струму контуру швидкості дозволяє спростити процес обмеження струму й моменту, для чого необхідно лише підтримувати на відповідному рівні сигнал на виході регулятора швидкості (сигнал завдання рівня струму).
Для регулювання положення вала двигуна в схеми, наведені на мал. 11.3 і 11.4, необхідно ввести відповідний зворотний зв'язок.
Розглянуті схеми відбивають структуру керування окремо взятої робочої машини. Багато же реальні технологічні процеси передбачають об'єднання в єдиний комплекс декількох взаємодіючих робочих машин і механізмів. Такі технологічні комплекси автоматизують, і ЕП при цьому виконує основну функцію. За рахунок відповідного керування ним забезпечується необхідна послідовність усіх технологічних операцій, досягаються оптимальні режими роботи промислового встаткування й самого ЕП, здійснюються необхідні блокування й захисту.
Для керування технологічними комплексами широко використовуються ЕОМ. Вони дозволяють швидко проводити обробку великого обсягу інформації про хід технологічного процесу, виробляти керуючі впливи на ЕП робочих машин і механізмів відповідно до заданої програми. Особливо широкі можливості відкриваються при використанні мікропроцесорної техніки керування, що дозволяє здійснювати автоматизацію як складних технологічних процесів у цілому, так і окремих виробничих операцій і циклів.