

1.Описание работы машины
Массы звеньев:
 .
.
Моменты
инерции звеньев:


Положение центров масс звеньев lS:
шатуна lAS2 =lAB/3.
кривошипа lAS1 =lOA/2.
Схема кривошипно-ползунного механизма изображена на рисунке 1.
Таблица 1 - Исходные данные к проекту
Параметры |
Обозн |
Ед. изм. |
Значения |
Эксцентриситет |
е |
м |
0,2 |
Длина кривошипа ОА |
|
м |
1.4 |
Длина шатуна AB |
|
м |
3.2 |
Угловая координата для силового рассчета |
|
град |
60 |
Угол наклона цилиндров |
|
град |
75 |
Угловая скорость кривошипа |
|
с-1 |
-12.57 |
Угловое ускорение кривошипа |
|
с-2 |
500 |
Сила сопротивления |
F |
Н |
-4000 |






z![]()
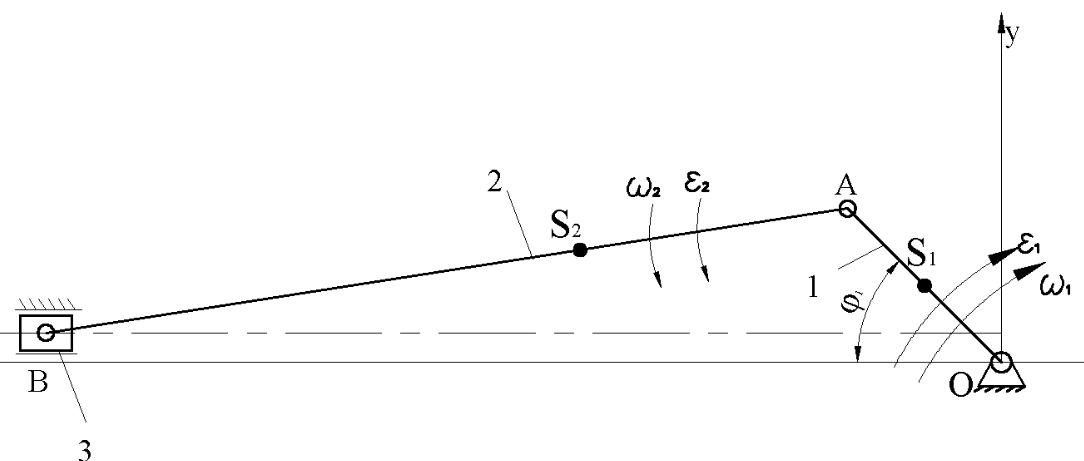
Рис 1.
2. Синтез и кинематический анализ рычажного механизма.
2.1. Структурный анализ рычажного механизма
Целью структурного анализа механизма является определение формулы строения механизма и классификация входящих в его состав структурных групп, так как формула строения определяет порядок выполнения кинематического и силового расчетов, а классы структурных групп - методы расчетов.
Структурная схема основного исполнительного механизма изображена на рис. 3.1. Число подвижных звеньев п = 3. Число низших кинематических пар pH=4, в том числе вращательные пары - 0(1,0 ), А(1,2), В(2,3), поступательная пара В(3,0),. Число высших кинематических пар Рв =0 • Число степеней свободы механизма
W=3n-2pH-pВ=3∙3-2∙4-0=1
Рисунок.3.1
Таким образом, для того
чтобы все звенья механизма совершали
однозначно определенные движения,
необходимо задать движение одному звену
- в данном случае кривошипу 1. Тогда
угловая координата кривошипа
 является обобщенной координатой
механизма, а кривошип - начальным звеном.
является обобщенной координатой
механизма, а кривошип - начальным звеном.
Данный механизм образован последовательным присоединением к механизму 1-го класса (кривошипу 1 и стойке 0) структурной группы (2, 3) (рис. 3.2).
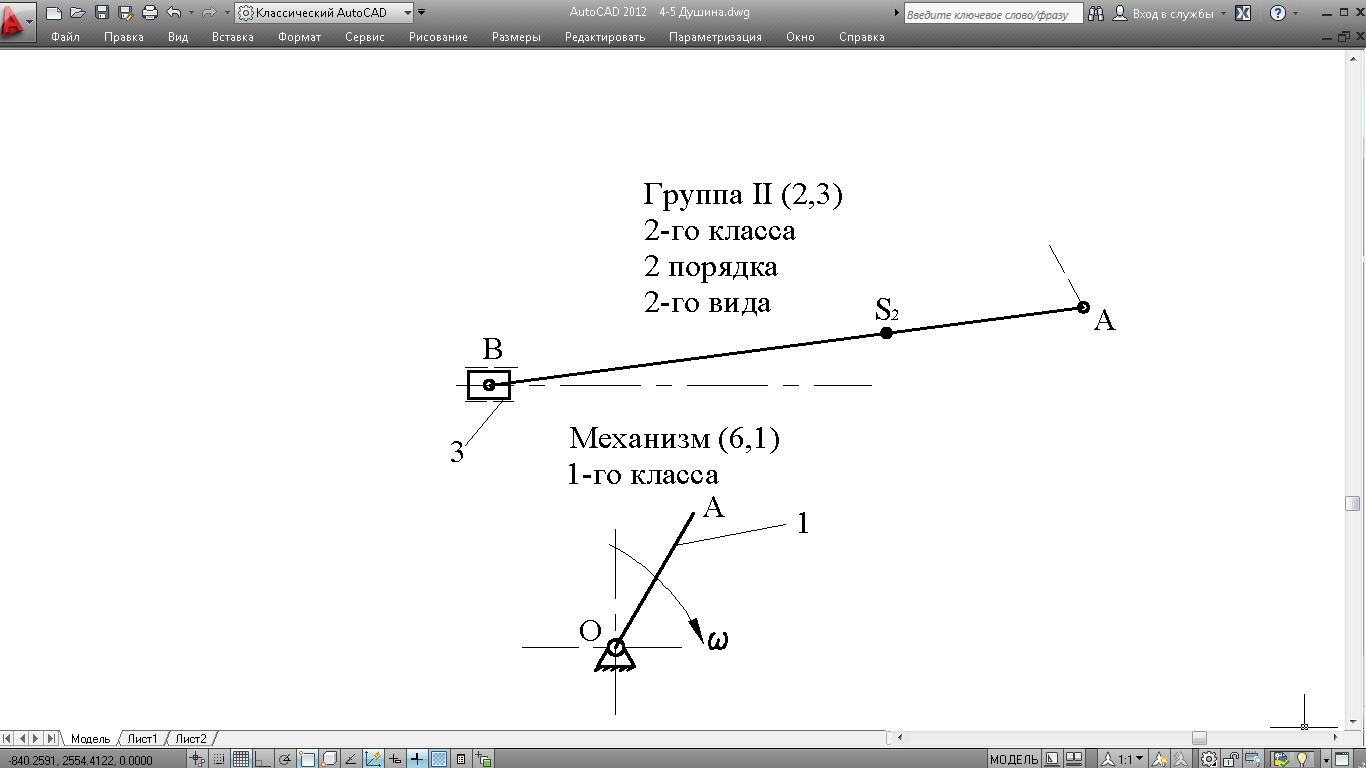
Рисунок.3.2
Формула строения механизма I(0,1)→II (2,3). Так как группа 2-го класса, то механизм относится ко 2-му классу.
Таким образом, кинематический анализ начинается с механизма I (0,1), а заканчивается группой II (2,3). Силовой расчёт выполняется в обратной последовательности II (2,3) → I (0,1).
2.2. Определение кинематических характеристик рычажного механизма методом планов
2.2.1 Определение размеров и параметров рычажного механизма
В соответствии с исходными данными входными параметрами синтеза рычажного механизма являются:
Эксцентриситет
 .
.
Длина кривошипа ОА
 .
.
Длина шатуна AB
 .
.
Положение центров масс звеньев lS:
шатуна lAS2 =lAB/3=3.2/3=1.07м.
кривошипа lAS1 =lOA/2=1.4/2=0,7м.
Угловая скорость кривошипа
 .
.
Угловое ускорение кривошипа
 .
.
Угловая координата для силового расчета

По исходным данным определяем массы звеньев (учитывая, что m2=m3=0, по условию):
 кг;
кг;
 кг;
кг;
 кг;
кг;
Центральные моменты инерции звеньев:


Таблица 3.1
Название и обозначение параметра |
Размеры l,м |
|
|
Массы, кг |
Осевые моменты инерции, кгм2
|
||||||||
l1 |
l2 |
lOS1 |
lAS2 |
e |
m1 |
m2 |
m3 |
|
|
||||
Численное значение |
1,4 |
3,2 |
0,7 |
1,07 |
0,200 |
-12,57 |
500 |
3,36 |
7,68 |
1,68 |
2,2 |
6,6 |
|



