


Введение
Задачей данного курсового проекта ставится на основании заданных технологических требований спроектировать тиристорный электропривод постоянного тока механизма передвижения тележки с обратной связью по скорости.
Расчет электропривода производится по следующей методике: по технологическому заданию определяются статические моменты сопротивлений и осуществляется предварительный выбор двигателя, исходя из полученной расчетной мощности. Для данного двигателя выбираются: редуктор, преобразователь, трансформатор и параметры цепи обратной связи. После этого расчитываются и строятся переходные процессы и нагрузочные диаграммы, по которым производится проверка двигателя и преобразователя в технологическом цикле по производительности, нагреву и перегрузочной способности.
По результатам проверок оценивается соответствие параметров, обеспечиваемых рассчитанным электроприводом, технологическому заданию и производится расчет его энергетических показателей. Уменьшение установленной мощности электропривода в приведенном расчете достигается за счет применения режима ослабления поля двигателя при обратном ходе манипулятора.
1 Описание рабочей машины и её технологического процесса
Механизм перемещения тележки мостового крана служит для перемещения поднятого груза с площадки загрузки на площадку выгрузки. Кинематическая схема механизма перемещения тележки мостового крана приведена на рисунке 1.
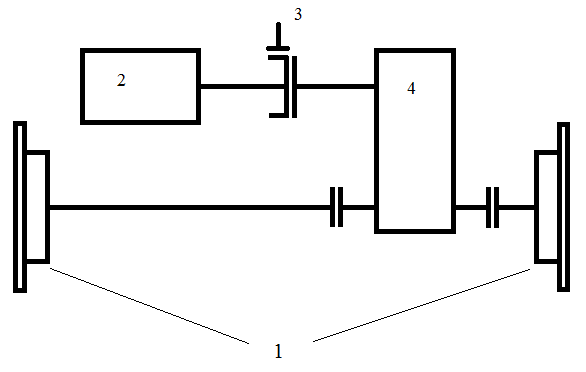
Рисунок 1. Кинематическая схема механизма перемещения тележки мостового крана: 1-ходовые колеса, 2-электродвигатель, 3-тормозной шкив, 4-редуктор.
На площадке загрузки груз зацепляется, механизм подъема обеспечивает подъем груза (груз может быть различной массы). Включается двигатель тележки, осуществляется перемещение тележки с грузом с установившейся рабочей скоростью Vр. По прибытии к площадке выгрузки двигатель затормаживается, тележка останавливается в заданном месте, переместившись на длину L. Происходит опускание груза, его отцепляют, пустой крюк поднимается. Включается двигатель для движения в обратную сторону с установившейся скоростью Vв, тележка возвращается на площадку загрузки, пройдя вновь расстояние L.
Таким образом, тележка совершает возвратно-поступательное движение на длину L от одного крайнего положения до другого. В цикл работы тележки входит время пауз, когда тележка стоит, производятся зацепление груза, его подъем, опускание, расцепление, подъем и опускание пустого крюка. Исходные параметры и технологические требования к рабочей машине приведены в таблице 1.
Таблица 1. Технические данные механизма перемещения тележки мостового крана.
Наименование показателя |
Обозначение |
Размерность |
Величина |
Масса тележки |
m |
T |
7.5 |
Масса груза максимальная |
mг |
Т |
16 |
Диаметр колеса |
D |
м |
0,2 |
Диаметр ступицы |
dс |
мм |
50 |
Коэффициент трения скольжения |
µ |
- |
0,02 |
Коэффициент трения качения |
f |
- |
0,5 |
Длина перемещения тележки |
L |
м |
4 |
Скорость движения с грузом |
Vр |
мм/с |
0,6 |
Скорость движения без груза |
Vв |
мм/с |
0,8 |
Предельное ускорение |
а |
мм/с2 |
0,5 |
Число циклов в час |
Z |
- |
80 |
Суммарное время работы не более |
tp |
c |
16 |
2 Расчёт моментов статических сопротивлений и предварительный расчёт мощности электродвигателя
1) время пуска tп до установившейся скорости с допустимым ускорением, торможения tт от установившейся скорости до остановки:
![]() (1)
(1)
2) путь, проходимый за время пуска (торможения) рабочей машиной:
![]()
![]() (2)
(2)
3) время установившегося режима движения со скоростью Vy:
![]() (3)
(3)
тогда, для режима разгона и торможения груженой тележки получим:
![]() c;
c;
![]() м;
м;
![]() =
5,47 с.
=
5,47 с.
Для режима разгона и торможения пустой тележки по формулам (1), (2) и (3) найдем:
![]() с;
с;
![]() м;
м;
![]() с.
с.
4) Полное время работы:
а)
рабочий ход
![]() (с)
(с)
б)
обратный ход
![]() (с)
(с)
![]() (c)
(c)
5)Определение статических моментов:
Статические сопротивления движения рабочей машины создаются силами трения скольжения в ступице и силами трения качения в ходовых колесах. Учесть силы трения в подшипниках пока не выбран двигатель невозможно. Моменты сил трения в ходовых колесах:
- при движении с грузом:
![]() (4)
(4)
где D– диаметр колеса, м;
Q1 – вес тележки с грузом, Н;
f – коэффициент трения качения, ;
- при движении без груза:
![]() ; (5)
; (5)
где Q2 – вес тележки без груза, Н.
Моменты сил трения скольжения в подшипники ступицы:
-при движении с грузом:
![]() ;
(6)
;
(6)
где dc– диаметр ступицы, м;
µ– коэффициент трения скольжения.
-при движении без груза:
![]() (7)
(7)
Найдем по формулам (4), (5), (6) и (7) найдем моменты сопротивления при движении тележки :
![]() Н м;
Н м;
![]() Н м;
Н м;
![]() Н
м;
Н
м;
![]() Н
м.
Н
м.
Определим угловые скорости движения вала:
![]() ;
(8)
;
(8)
![]() .
(9)
.
(9)
По формулам (8) и (9) найдем угловые скорости:
![]() ;
;
![]() .
.
Определим радиус приведения сил:
![]() ,
(10)
,
(10)
Где V – скорость линейного перемещения винта;
ω – угловая скорость движения винта;
По формуле (10) радиус приведения:
![]() м
м
Для определения динамического момента рабочей машины рассчитывается момент инерции рабочего органа с грузом и без груза:
![]() (11)
(11)
![]() (12)
(12)
![]() кг
м2;
кг
м2;
![]() кг
м2.
кг
м2.
Определим динамический момент с учетом величины допустимого ускорения:
![]() (13)
(13)
![]() Н
м;
Н
м;
![]() Н м.
Н м.
Полный момент рабочей машины:
![]() ; (14)
; (14)
Знак полного момента и его составляющих зависит от направления движения и режима работы.
При рабочем ходе полный момент рабочей машины, по формуле (14), будет равен:
![]() Н м;
Н м;
![]() Н м.
Н м.
При обратном ходе:
![]() Н м;
Н м;
![]() Н м.
Н м.
По результатам расчетов на рисунке 2 построены зависимость рабочей машины от моментов для каждого режима работы.
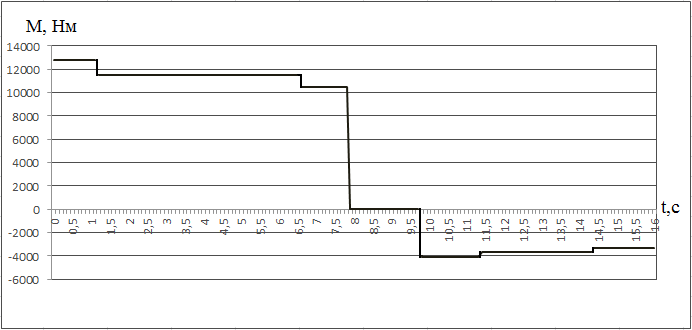
Рисунок 2. Нагрузочные диаграммы
На основе построенной нагрузочной диаграммы момента рабочей машины можно рассчитать среднеквадратичное значение момента,
 (15)
(15)
в котором учтены не только статические нагрузки, но и часть динамических нагрузок.
Здесь МК – момент на k-том участке: k = 1, 2, …, m, где под участком понимается промежуток времени, в течение которого происходит разгон, торможение, работа с постоянной скоростью;
tK – длительность k-того участка.
Среднеквадратичное значение момента по формуле (10):

![]()
=8820,88 Н м
При этом мощность двигателя может быть определена по соотношению:
![]() (16)
(16)
где k1 – коэффициент, учитывающий динамические нагрузки, обусловленные вращающимися элементами электропривода (двигатель, редуктор), а также потерями в редукторе. Примем k1 = 1,4;
ПВФ – фактическое значение относительной продолжительности включения проектируемого электропривода;
ПВК – ближайшее к ПВФ каталожное значение относительной продолжительности включения для электродвигателей выбранной серии;
Фактическое значение относительной продолжительности включения ПВФ рассчитывается по длительности времени работы tК на всех m участках движения по заданному времени цикла:
![]() с.
с.
Где Z - число циклов работы машины в час
Тогда
![]()
Тогда
Рдв=![]() Вт
Вт