

1.3 Виконання та захист курсового проекту
При виконанні проекту студенту потрібно виявити максимум самостійності і творчої ініціативи у виборі варіантів конструкції, матеріалів, графічного оформлення і таке інше.
Робота над проектом контролюється викладачем-консультантом. Консультант перевіряє роботу студента, допомагає розібратись у не зрозумілих питаннях, дає ради і вказівки по поліпшенню конструкції і графічному оформленню креслень.
Умовою допуску до захисту є позитивна рецензія консультанта. На захисті студент викладає зміст завдання і його реалізації у проекті, а також відповідає на запитання викладачів членів-комісії.
Студент повинен добре орієнтуватися у проекті – тоб-то:
вміти пояснити устрій і призначення механічного привода та вимоги до нього;
обгрунтувати прийняті конструктивні і технологічні рішення, вибір матеріалу, термообробки;
розуміти значення кожної лінії у кресленнях;
пояснити особливості конструкції та розрахунків;
вміти пояснити послідовність збирання вузлів та передачі навантаження з однієї деталі на іншу і таке подібне.
При оцінці захисту окрім якості проекта і знань враховується додержання установлених термінів проектування, самостійність та рівень рішень.
2 Енергосиловий та кінематичний розрахунки параметрів привода
2.1 Позначення параметрів та елементів привода
З метою зручності ведення розрахунків параметрам елементів передачі, що розглядається, надають індекси: ведучого “1” та веденого - “2”. Для індексації елементів передач використовують:
“п” - пасова передача; “ч” - черв’ячна передача;
“пп” - плоскопасова передача; “г” - гвинтова передача;
“кп” - клинопасова передача; “л” - ланцюгова передача;
“р” – редуктор; “пл” - планетарна передача;
“ц” - циліндрична передача; “м” – муфта;
“к” - конічна передача; “пк” - підшипник кочення.
Перед визначенням параметрів необхідно накреслити службову кінематичну схему (рис. 2.1) або альтернативні схеми привода. Вхідний вал привода, вал електродвигуна позначають буквою - D. На схемах редукторів буквами Ш, П, Т позначають швидкохідний, проміжний і тихохідний вали і їх параметри відповідно.
2.2 Визначення потрібної потужності і вибір електродвигуна
При довгостроковому постійному або незначному змінному навантаженні, яке притаманне компресорам, конвеєрам, транспортерам та іншим механізмам, розрахункова потужність електродвигуна Р/д , кВт привода визначається через потужність на вихідному валу привода Рт , кВт, яка може бути задана або визначена по тяговому зусиллю F, H, коловій швидкості стрічки V, м/с, або обертовому моменту Тт , Нм , кутовій швидкості вала т , рад/с, частоті обертання nт , хв-1:
![]() (2.1)
(2.1)
де
Рт
=![]() або Рт
=
або Рт
=![]() ,
кВт
,
кВт
Загальний
ККД привода: ![]() (2.2)
(2.2)
де 1 2 - ККД окремих передач привода з табл. 2.1.
пк - ККД однієї пари підшипників кочення;
к - число валів або пар підшипників.
ККД двох зубчастих пар двопоточного ступіня редуктора дорівнює ККД поточного ступіня того ж типу (прямозубої або косозубої передачі), що передає таку ж потужність.
Для привода конвеєра і інших механізмів широко використовують асинхронні короткозамкнуті електродвигуни серії 4А виконання М 1081, М 2081, М 3081 за ГОСТ 19523-81 потужністю від 0,55 до 30 кВт та синхронними частотами обертання ротора nс від 750 до 3000 хв-1 (рис. 2.2).
Таблиця 2.1- Орієнтовні ККД елементів механічного привода
Елементи |
ККД передачі, |
||
привода |
Позна-чення |
відкрита |
закрита |
1. Передачі: 1.2 Плоскопасові Клинопасові 1.3 Зубчасті циліндричні 1.4 Зубчасті конічні 1.5 Черв’ячні для передаточних чисел U 30 14 - 30 8 - 14 1.6Передача гвинт-гайка з тертям ковзання для кутів підйому різьби: 2 - 100 10 - 200 з тертям кочення 1.7 Ланцюгові передачі 2. Муфти /4/ 3. Підшипники кочення |
пп кп ц к
ч
г
л м пк |
0,96 - 0,98 0,94 - 0,96 0,93 - 0,95 0,92 - 0,94
- - -
0,25 - 0,45 0,45 - 0,70 0,80 - 0,90 0,92 - 0,94 0,98 - |
0,96 ... 0,98 0,96 ... 0,97
0,70 ... 0,75 0,75 ... 0,82 0,87 ... 0,92
- - - 0,96 ... 0,97 - 0,99 |
З таблиці 2.2 вибирають електродвигун ближчої меншої по ряду потужності Р у порівнянні з розрахунковою Р/д, якщо перевантаження
![]() не
перевищує:
не
перевищує:
8% - при постійному навантаженні;
12% - при змінному навантаженні привода.
Якщо перевантаження перевищує допустиме, вибирають двигун ближчої по ряду більшої потужності не розраховуючи його навантаження.
Таблиця 2.2 - Позначення та параметри електродвигунів серії 4А
Потужність |
Синхронна частота обертання nсд, хв-1 |
|||
Двигуна, |
3000 |
1500 |
1000 |
750 |
Рд, кВт |
/асинхронна частота nа, хв-1 / пуск |
|||
0,25 0,37 0,55 0,75 1,1 1,5 2,2 3,0 4,0 5,5 7,5 11,0 15,0 18,5 22 30 |
56В2//2760/2 63A2/2740/2 63B2/2740/2 71A2/2840/2 71B2/2810/2 80A2/2850/2 80B2/2850/2 90L2/2840/2 100S2/2880/2 100L2/2880/2 112M2/2900/1,6 132M2/2900/1,6 160S2/2940/1,4 160M2/2940/1,4 180S2/2945/1,4 180M2/2945/1,4 |
63A4/1370/2 63B4/1365/2 71A4/1390/2 71B4/1390/2 80A4/1420/2 80B4/1415/2 90L4/1425/2 100S4/1435/2 100L4/1430/2 112M4/1445/2 132S4/1455/2 132M4/1460/2 160S4/1465/1,4 160M4/1465/1,4 180S4/1470/1,4 180M4/1470/1,4 |
63B6/890/2 71A6/910/2 71B6/900/2 80A6/915/2 80B6/920/2 90L6/935/2 100L6/950/2 112M6/955/2 112MB6/950/2 132S6/965/2 132M6/970/2 160S6/975/1,2 160M6/975/1,2 180M6/975/1,2 - - |
71B8/680/1,6 80A8/675/1,6 80B8/700/1,6 90LA8/700/1,6 90LB8/700/1,6 100L8/700/1,6 112MA8/700/1,6 112MB8/720/1,8 132S8/720/1,8 132M8/730/1,8 160S8/730/1,4 160M8/730/1,4 180M8/730/1,2 - - - |
Примітка. пуск =Тп/Тн- коефіцієнт пускового навантаження двигуна.
Коефіцієнт максимального перевантажування для двигунів потужністю 11,15 та 18,5 кВт з частотою обертання nсд=1000 хв-1 та двигуна потужністю 15 кВт з частотою обертання nсд=750 хв-1 ;
для двигунів потужністю до 2,2 кВт з nсд=750 хв-1 , max=1,7 , для інших - 2,2. Тпуск, Тmax, Тном - відповідно пусковий, максимальний та номінальний моменти двигуна.
Розшифровка повного позначення, наприклад, двигуна 4А112МВ6У3:
4- порядковий номер серії;
А- рід двигуна (асинхронний);
112- відстань від опорної поверхні до осі вала, мм;
М- установочний розмір по довжині станини (S, M,L);
В- довжина осердя статора (А, В);
6- число полюсів /2, 4, 6, 8/;
У- кліматичне виконання (універсальне та ін.);
З- категорія.
Вибираючи частоту обертання двигуна табл. 2.2 слід зважати на наступне.
При сталій потужності двигуна із збільшенням частоти обертання його розміри, маса та вартість зменшуються, а ККД зростає. Однак із збільшенням частоти обертання, робочий ресурс двигуна зменшується, а передаточне число привода, його маса, габаритні розміри і вартість зростають. Оптимальні характеристики привода одержують на основі техніко-економічної оцінки варіантів схем, що порівнюють. Для приводів загального призначення, якщо немає спеціальних вказівок, перевагу слід віддати двигунам з частотою обертання 1500 та 1000 хв-1.
Орієнтовно синхронну частоту обертання вала двигуна nдс можна вибрати з урахуванням частоти обертання вихідного вала привода nт, використовуючи рекомендації таблиці 2.3.
Маючи потужність Рд/ та синхронну частоту обертання двигуна nдс з таблиць 2.2 й 2.4 можна вибрати типорозмір електродвигуна. Наприклад, двигун виконання IM1081 4A1004У3, потужністю Рд = 4 кВт з частотою обертання nд = 1430 хв -1 , коефіцієнтом пускового та максимального перевантаження пуск = 2,0; max= 2,2 (ГОСТ 19523-81): записати його умовне позначення, основні характеристики, виконати ескіз двигуна з позначенням його габаритних розмірів /Рис. 2.2/.
Якщо пуск двигуна більше ніж , що задане графіком навантаження привода /див. приклад/, та в разі завдання навантаження затиповим графіком /див. рис. 1.1/ у подальших розрахунках деталей привода використовують коефіцієнт пускового перевантаження двигуна пуск.
Таблиця 2.3 - Рекомендовані частоти обертання вала електродвигуна
Тип привода |
Частота обертання, хв-1 |
|
на виході привода, nт |
електродвигуна, nдс |
|
1.Трьохступінчастий: - з одно або двоступінчастим циліндричним редуктором, конічно-циліндричним або конічним редуктором; |
більше 120
від 40 до 120 від 20 до 60 від 15 до 40 |
3000
1500 1000 750 |
2.Двоступінчастий:
циліндричним редуктором; |
від 80 до 150 від 40 до 80 |
1500 1000 |
- з конічним редуктором |
від 150 до 300 від 100 до 200 від 60 до 120 |
1500 1000 750 |
- з черв’ячним або черв’ячно-циліндричним ( циліндро-черв’ячним редуктором) |
від 10 до 25
від 5 до 15 |
1500
1000 |

Рисунок 2.1 - Схема привода (приклад)
ВИКОНАННЯ ІМ 1081
ВИКОНАННЯ ІМ 2081
ВИКОНАННЯ ІМ 3081

Рисунок 2.2 - Електродвигуни серії 4А
Т аблиця
2.4 - Основні розміри електродвигунів
серії 4A
аблиця
2.4 - Основні розміри електродвигунів
серії 4A
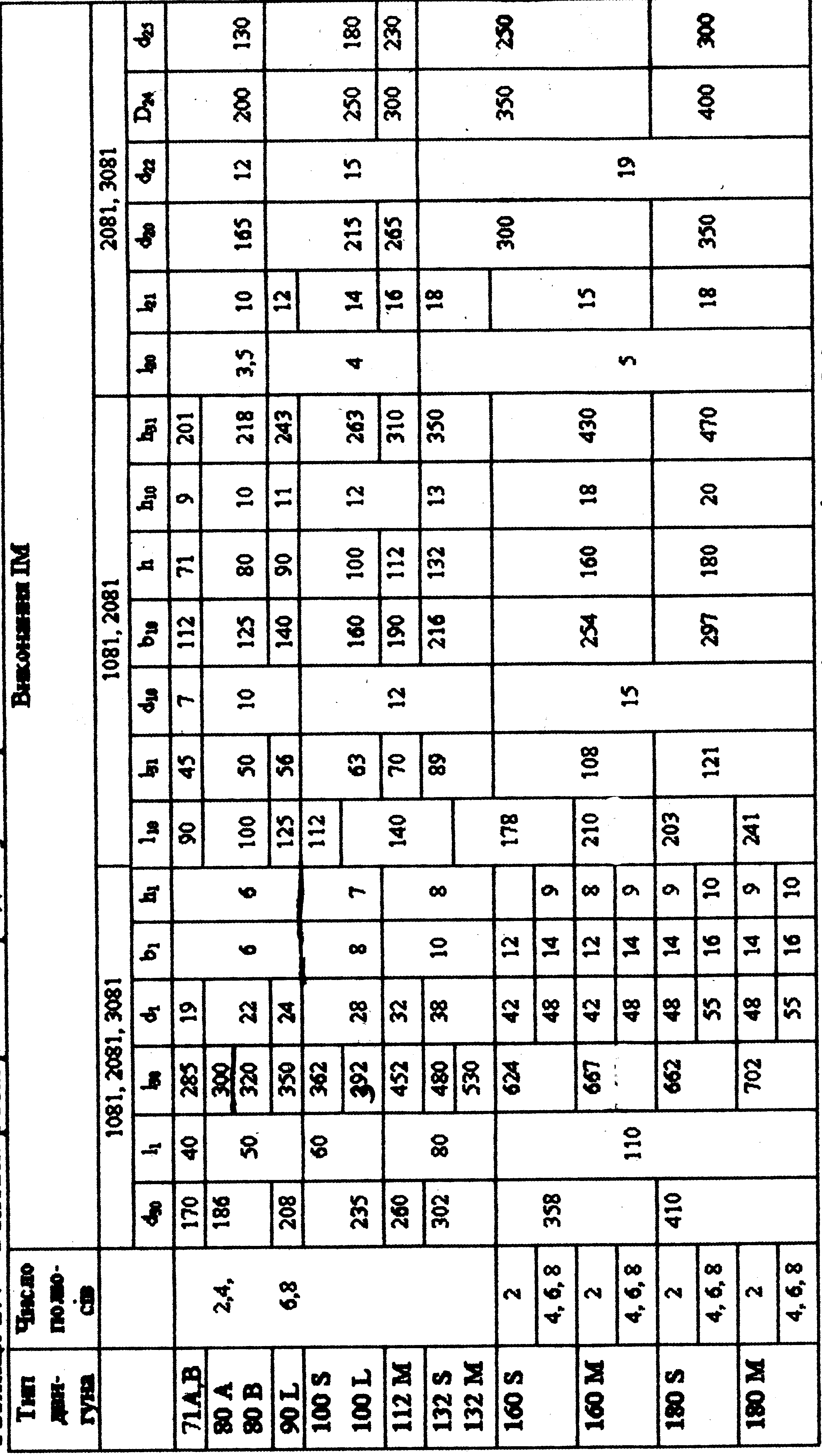
Примітка. Приведені в табл. 2.4. розміри електродвигунів позначені на рис. 2.1