

14.5.2. Конструктивные схемы и рабочий процесс.
Грейдер–элеватор состоит из следующих основных частей (рис. 14.31): основной рамы 5, плужной рамы 4 с гидроцилиндром 9 подъема, режущего рабочего органа 3, конвейера 8 с гидроцилиндром 10 подъема верха, ходового оборудования – колес 2, сцепного устройства 6 и 7, двигателя 12 и механизмов трансмиссии 11, гидропривода и системы управления.
В грейдер–элеваторах в качестве рабочего органа, широко применяются дисковые ножи (рис. 14.32), жестко закрепляемые при помощи кронштейна 3 на плужной раме 1, которая, в свою очередь, шарнирно соединяется с основной рамой машины. Они располагаются под углом к горизонтальной плоскости и к направлению движения машины так, чтобы срезаемый ножом пласт грунта, поворачиваясь, ложился на середину ленты конвейера, а процесс резания проходил с минимальной энергоемкостью, что возможно при согласовании положения ножа со свойствами разрабатываемого грунта и скоростью резания. Поэтому во всех конструкциях грейдер-элеваторов предусматривается широкий диапазон регулировки положения ножа.
Эффективность процесса резания и траектории потока срезанного грунта существенно зависят от формы и размеров ножа. Наиболее рациональной формой является сферический диск с отношением радиуса сферы к диаметру ножа 0,85…1. С увеличением радиуса кривизны ножа энергоемкость резания снижается, но ухудшается подача грунта на конвейер.
Зубчатые соединительные диски и центральный болт позволяют поворачивать нож по мере износа его режущей кромки. Максимальная глубина резания составляет половину диаметра ножа.
Применение совковых ножей способствует уменьшению потерь срезанного грунта при передаче на конвейер, но требует больших, чем дисковые, затрат труда на восстановление и перестановку после износа.
В грейдерах–элеваторах обычно применяют наклонные ленточные конвейеры с гладкой прорезиненной лентой. Несущая ветвь конвейера выполняется желобчатой. Головной барабан обычно совмещает в себе функции приводного и натяжного.
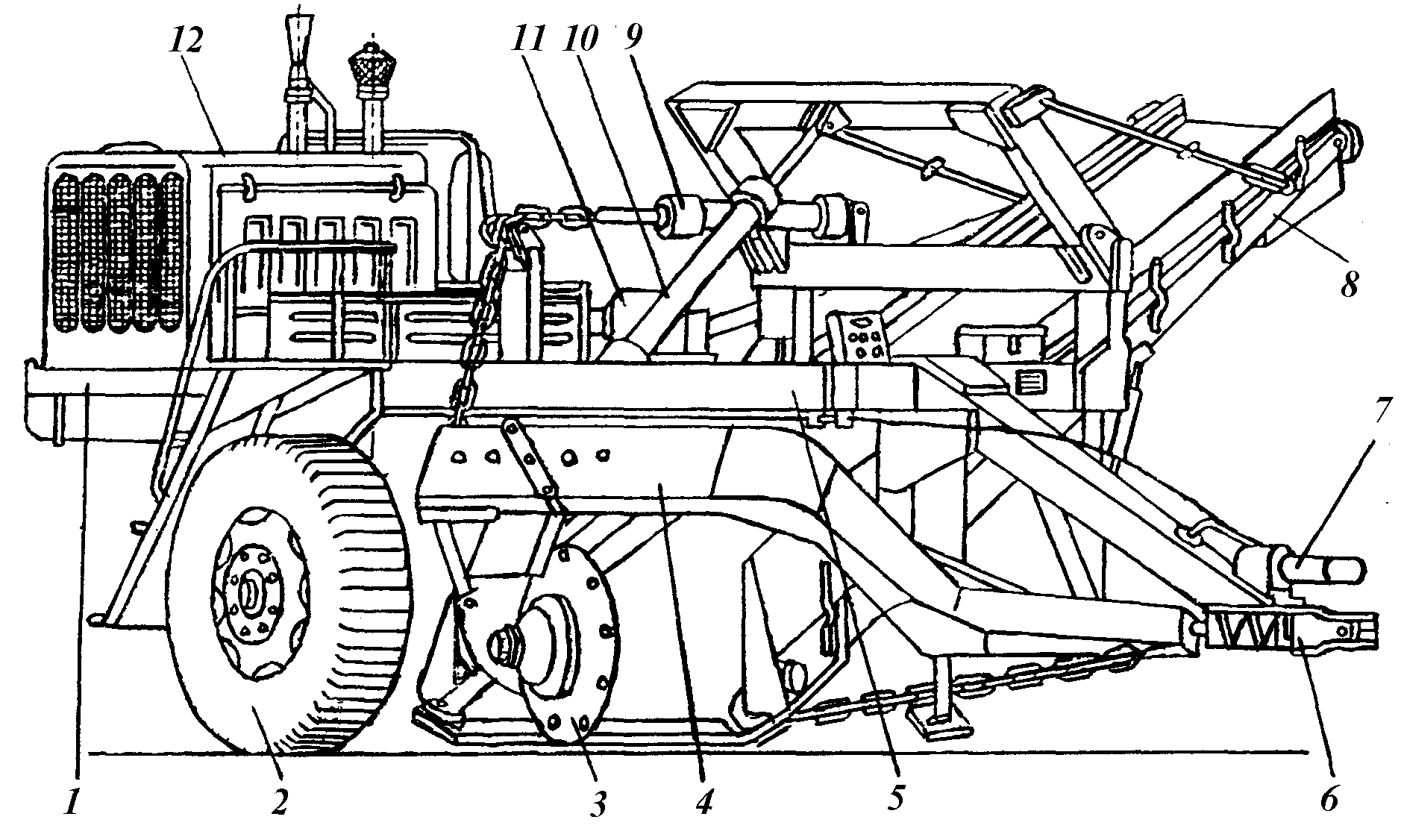
Рис. 14.31 Грейдер – элеватор
Конвейер может приводится в движение отдельным, установленным на раме грейдер–элеватора, двигателем внутреннего сгорания через систему карданных валов, а также электрическим или гидравлическим двигателем, получающим питание от соответствующей системы тягача. Дальность транспортирования грунта регулируется изменением скорости ленты конвейера в пределах 3…8 м/с, а также изменением его наклона.
Для улучшения загрузки конвейера, сокращения потерь грунта и придания поступающему на конвейер грунту необходимой скорости в направлении ленты грейдер–элеваторы снабжаются скребковыми или ротационными метателями.
Для очистки ленты с внутренней стороны от налипшего грунта грейдер–элеваторы снабжаются винтовыми или скребковым очистным устройством.
Для уменьшения транспортных габаритов грейдер–элеватора конвейеры выполняются складными; механизм складывания обычно объединяется с механизмом подъема и опускания.
Другим типом транспортирующего органа, получившим распространение в стругах, является метатель. Наиболее часто применяются ротационные метатели с подвижным или неподвижным кожухом и поворачивающимися лопатками (рис. 14.33). Выбрасывание грунта ротором метателя происходит за счет центробежной силы при выходе грунта из зоны кожуха или в момент поворота лопаток. Поворачивая кожух или копир для открытия лопаток вокруг оси ротора, можно изменить момент вылета, а значит и траекторию полета грунта.

Рис. 14.32 Дисковый режущий орган грейдер-элеватора: 1 – плужная балка; 2 – распорка (подкос); 3 – кронштейн; 4 – сферический нож; 5 – зубчатые соединительные диски; 6 – центральный болт.
Метатели позволяют отбрасывать грунт дальше, чем конвейер, но точность укладки оказывается меньше, так как грунт разбрасывается и рассеивается в пределах широкой полосы, а энергоемкость транспортирования грунта повышается.
Все грейдер–элеваторы с ленточными конвейерами для увеличения устойчивости имеют раздвижную заднюю ось, позволяющую значительно увеличить колею машины в рабочем положении, или дополнительную опору велосипедного типа, устанавливаемую под рамой конвейера.
Эффективным методом увеличения устойчивости и дальности транспортирования грунта является также уменьшение длины конвейера и установка после него специального ускорителя – метателя с ребристой лентой, двигающейся с повышенной скоростью и отбрасывающей грунт на значительные расстояния.
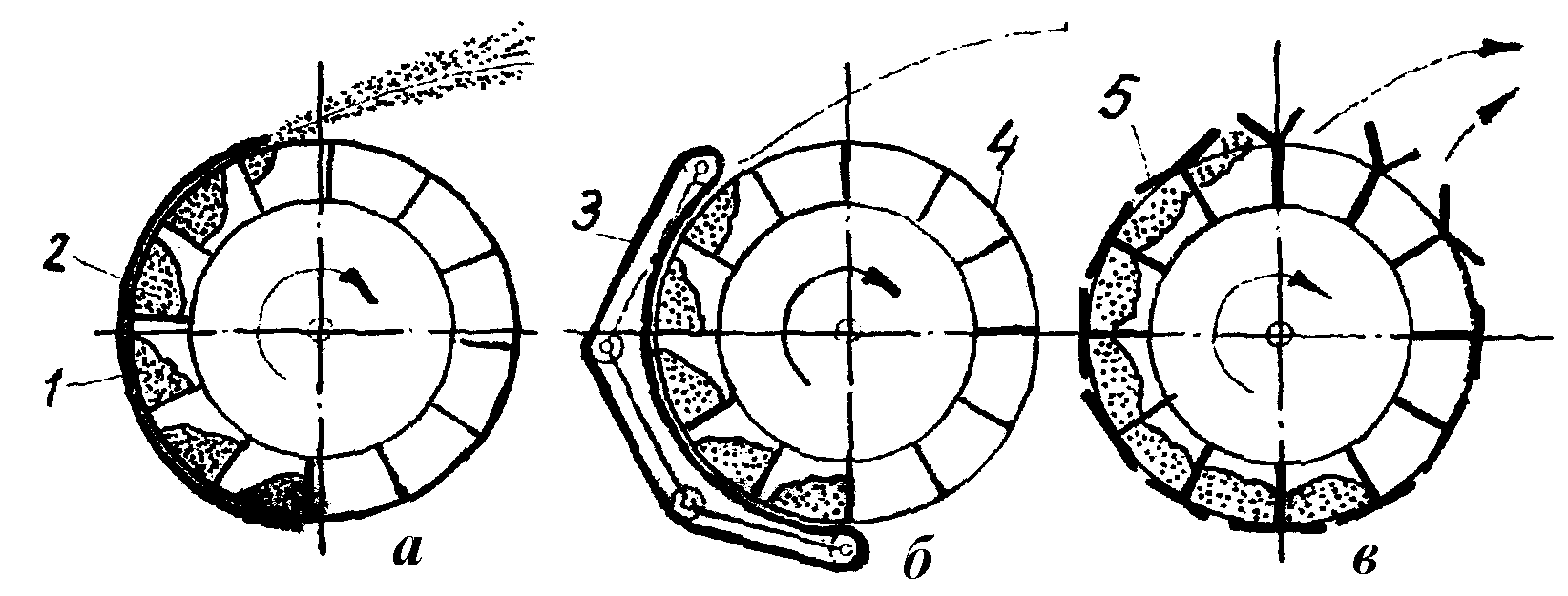
Рис. 14.33 Принципиальные схемы ротационных метателей, применяемых в грейдер-элеваторах: а – с неподвижным кожухом; б – с подвижным кожухом; в – с лопастями, управляемыми копиром; 1 – кожух; 2 – грунт, перемещаемый лопастью; 3 – лента подвижного кожуха; 4 – лопасть ротора – метателя; 5 - поворачивающаяся лопатка ротора.
Управление рабочими органами, раздвижкой оси и перестановкой конвейера из рабочего в транспортное положение производится объемной гидросистемой с обычными или электрогидравлическими золотниковыми распределителями.
Рабочий цикл грейдер–элеватора tц состоит из срезания грунта на длине L участка разработки (захватки) t1, подъема ножа t2, разворота грейдер–элеватора и перехода на противоположную сторону сооружения при кольцевой схеме или маневра для перехода на параллельную стружку при челночной схеме (для грейдер-элеватора с поворотным ножом) t3 и опускания ножа t4.
![]() ;
(14.141)
;
(14.141)
Количество грунта, поступающего с транспортирующего устройства, определяется площадью поперечного сечения срезаемой стружки и скоростью движения машины.
При возведении грейдер–элеватором с неповоротным ножом насыпей из односторонних резервов по кольцевой схеме проходы по срезке грунта чередуются с возвратными (холостыми) проходами.