

14.3.6. Выбор положений скрепера для расчетов на прочность.
Расчет на прочность узлов и деталей скрепера производят для положений, соответствующих наибольшей нагрузке (конец резания и транспортирование грунта). Нагрузки при транспортном положении груженого скрепера определяют для двух положений: прямолинейного движения скрепера и при повороте. Первое расчетное положение в движении схематически представлено на рис. 14.18.
Скрепер движется по горизонтальной поверхности. Ковш заполнен с шапкой. Динамические нагрузки учитываются коэффициентом динамичности (Кд=2).
В вертикальную активную нагрузку Gс+г включают вес скрепера с тягачом и грунтом.

Рис. 14.18 Схема для определения сил, действующих на скрепер в транспортном положении при прямолинейном движении.
Окружная сила Р0 на колесе направлена на преодоление сил сопротивления качению R1пер и R2пер которые, в свою очередь, равны R1пер=R1·f и R2пер=R2·f, где R1 и R2 – вертикальные реакции на передние и задние колеса.
При движении машины должно быть обеспечено неравенство:
![]() ;
(14.71)
;
(14.71)
Из уравнения моментов сил относительно точки 0 можно найти значения: R1 и R2:R1·l1=Gc+г·Kд·l; R2= Gc+г·Kд-R1.
По полученным значениям нагрузок несущие и поворотные устройства рассчитывают на прочность.
Во втором расчетном положении (рис.4.19) тягач повернут на 900 по отношению к груженому скреперу, у которого заднее колесо находится в канаве глубиной h=0,5·rк. Потребное окружное усилие на ведущих колесах для выезда из препятствия:
![]() ;
(14.72)
;
(14.72)
где Р01 – сопротивление перекатыванию груженой машины;
Р02 – сопротивление препятствия.

Рис. 14.19 Схема для определения сил, действующих на скрепер в транспортном положении при повороте.
При
этом
![]() и
и
![]() .
.
Горизонтальную составляющую R1пр реакции препятствия определяют по формуле:
![]() ;
(14.73)
;
(14.73)
где tgα=l2·/(rк-h)
Тогда
![]() ;
(14.74)
;
(14.74)
Значение R2пр можно принимать равным R2.
Реакция
![]() ;
(14.75)
;
(14.75)
Тогда:
![]() ;
(14.76)
;
(14.76)
По полученным нагрузкам рассчитывают тяговую раму и детали колес скрепера.
Нагрузки на конструкцию скрепера определяют при копании им грунта. Максимальные значения они имеют в конце наполнения и начало подъема ковша скрепера или при режиме копания с вывешенными задними колесами. В первом случае скрепер при движении по горизонтальной поверхности опирается на все колеса, ковш максимально наполнен грунтом. Расчетная схема для этого случая представлена на рис. 14.20.
На скрепер действуют активные силы: окружное усилие Р0, тяговое усилие толкача Ртяг, сила тяжести скрепера с грунтом Gс+г, реактивные силы – реакции грунта на колеса R1 и R2, силы для преодоления сопротивления грунта копанию Рк и Рн, силы сопротивления движению колес R1пер и R2пер. Кроме того, действуют реакции грунта на нож скрепера Rк и Rн, реакции в шарнире крепления тяговой рамы к ковшу Rх и Rу, а также усилие на штоке гидроцилиндров подъема ковша Рц.

Рис. 14.20 Схема для определения сил, действующих на скрепер в конце заполнения и начале подъема ковша
Сила тяжести скрепера Gc+г, меняющаяся по мере наполнения ковша грунтом, имеет максимальное значение в конце наполнения. Меняется и положение центра тяжести ковша с грунтом в зависимости от высоты подъема и опускания ковша.
Наибольшая сила тяги определяется мощностью двигателя тягача или условиями сцепления ходового устройства с грунтом. Для прицепного скрепера силу тяги при расчете на прочность принимают равной:
![]() ;
(14.77)
;
(14.77)
где Gm – сила тяжести тягача; φсцмакс – максимальный коэффициент сцепления гусениц (колес) тягача с грунтом.
Для полуприцепного и самоходного скрепера расчетная сила тяги равна:
![]() ;
(14.78)
;
(14.78)
где Ромакс – максимальное окружное усилие на ведущих колесах.
Тяговое усилие толкача определяют по формуле:
![]() ;
(14.79)
;
(14.79)
Расчетная сила тяги с учетом работы толкача:
![]() ;
(14.80)
;
(14.80)
При резании грунта и наполнении ковша на скрепер действуют силы со стороны грунта и призмы волочения Рк, Рн, Rк и Rн. Силу Рк определяют из уравнения тягового баланса скрепера.
![]() ;
(14.81)
;
(14.81)
где Рпр=W3 – сопротивление перемещению призмы волочения.
Наибольшее значение Рк будет при минимальных значениях Рпр и R2пер. Это возможно при работе скрепера на плотных грунтах, когда призма волочения отсутствует, а сопротивление перемещению колес минимальное.
Результирующая сил Рн и Rн в процессе работы скрепера изменяется по величине и направлению. В начальный момент заглубления она направлена вверх, препятствуя заглублению ковша. Ее значение можно определить по несущей способности грунта и величине опорной поверхности ножа по формуле:
![]() ;
(14.82)
;
(14.82)
где К' – коэффициент несущей способности грунта, К'=50-60 кН/м2;
х – ширина нижней площадки ножа, трущейся о грунт, х=1,0-1,5 см.
Максимально возможное значение Rн выбирают из условия, что задние колеса скрепера полностью разгружены и при перемещении он опирается на передние колеса и нож ковша. При заглублении ножа вертикальная составляющая Рн направлена вниз и увеличивается по мере наполнения ковша. Максимального значения Рн достигает в начальный момент выглубления ковша, когда давления на нож снизу нет.
Значение Рн можно найти из условия равновесия сил, действующих на скрепер (рис. 14.20.).
![]() ;
;
![]() ;
(14.83)
;
(14.83)
![]() ;
;
![]() ;
(14.84)
;
(14.84)
![]() ;
;
![]() ;
(14.85)
;
(14.85)
После замены в этих уравнениях R1пер и R2пер на R1пер= R1f и R2пер= R2f и их совместного решения находят значения R1, R2 и Pн.
При режиме копания с поднятыми задними колесами скрепер опирается на передние колеса и ножи, укрепленные на подножевой балке (рис. 14.21.). Уравнение сил, действующих на скрепер, в этом случае можно представить в следующем виде:
![]() ;
;
![]() ;
(14.86)
;
(14.86)
![]() ;
;
![]() ;
(14.87)
;
(14.87)
;
![]() ;
(14.88)
;
(14.88)
Совместным решением этих уравнений определяют значения R1 и Rн.
В рассмотренных положениях скрепера подножевая балка скрепера будет работать на изгиб в горизонтальной плоскости под действием сил Рк и Rк, а в вертикальной – силы Рн (Rн). При этом нагрузка на балку будет максимальной. Для расчета следует сопоставить значения, полученные по разным вариантам, и принять максимальное.
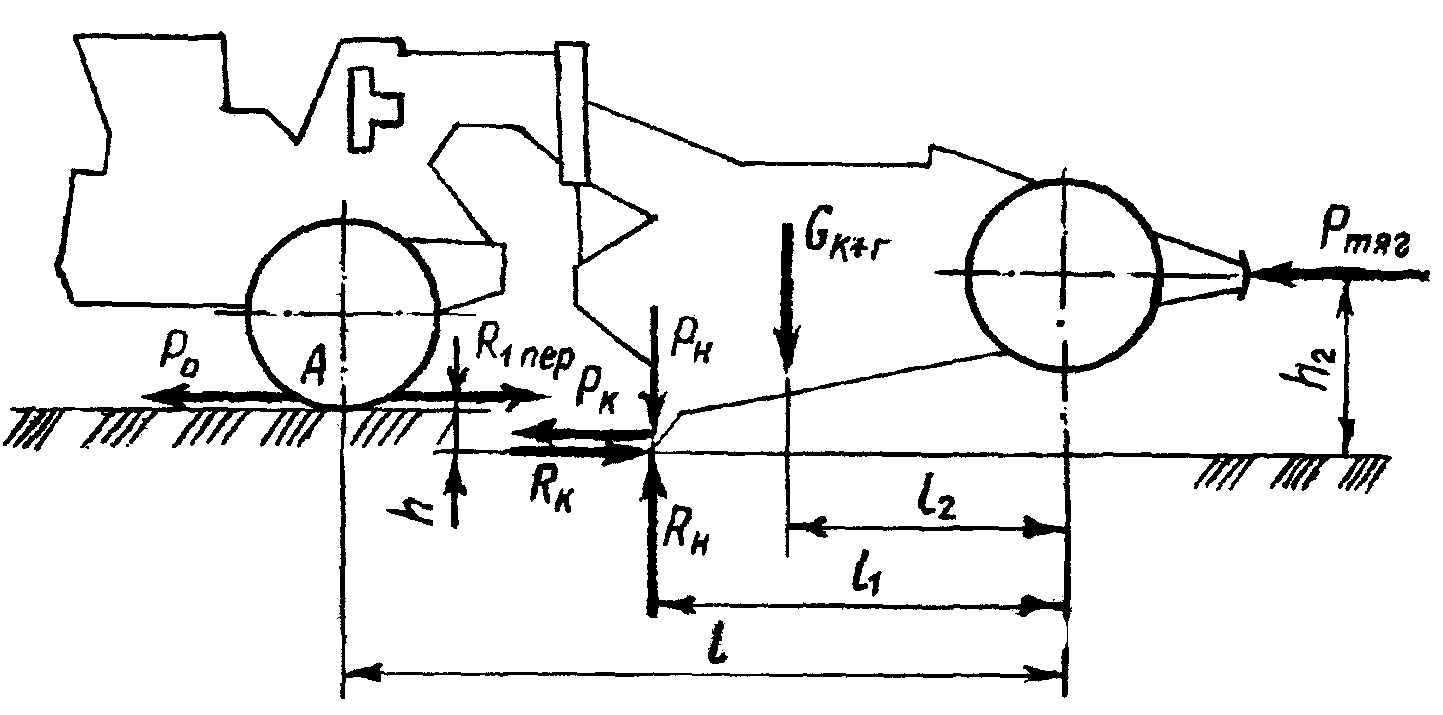
Рис.14.21 Схема к расчету сил, действующих на скрепер при копании грунта с вывешенными задними колесами.
Определение усилия в механизме подъема Рц изложено в подразделе 14.3.5.
Значение составляющих Rx и R у в упряжном шарнире крепления тяговой рамы следует определять из уравнений равновесия сил, действующих на ковш (см. рис. 14.20).
;
![]() ;
(14.89)
;
(14.89)
;
![]() ;
(14.90)
;
(14.90)
Для определения расчетных нагрузок данные, полученные при расчете на рабочем режиме, следует сравнить с данными, определенными при транспортном режиме и выбрать наибольшие значения, по которым производят расчет на прочность элементов скрепера.